1.本发明属于无人机技术领域,具体涉及一种基于物联网的无人机蓝牙通信系统及方法。
背景技术:
2.无人机(uav)即无人驾驶飞行器,是一种无需人工实时操控或由自身程序所控制的无人化飞行器。与载人飞机相比,无人机造价相对较低、体积相对较小、安全系数高、战场生存能力强、可操作性容错率低、易保养维护等优点,备受人们的青睐。由于无人机不需要专业飞行人员驾驶,因此,在动力充足的条件下,可以进行长时间的巡航与工作,可以探索人类无法接近的危险区域,替代人类执行危险的任务。
3.随着智能化时代到来,无人机逐渐大众化,越来越多的行业开始使用无人机从事作业。无人机如何高效的完成作业任务取决于路径规划系统,无人机路径规划是指为了保证无人机完成特定的飞行任务,并且在完成任务的过程中躲避各种障碍、威胁区域而设计出最优航迹路线的过程。
4.但是现有技术中的无人机在巡航过程中,无法实时采集无人机的能耗状态,只能在无人机处于能耗水平充足状态、能够巡航所有被监测巡航区域的情况下,进行巡航航迹的路径规划,且现有技术中的无人机数据采集通常采用wifi、3g或4g无线通信模块,在多架无人机进行同时巡航以及和云平台或总部的远程计算机进行数据通信交换过程中,多架无人机采集到的频域数据信号通过复杂的频域信道进行通信,造成了信号噪声过大,云平台储存的数据不准确或者杂乱无章的情况发生。
技术实现要素:
5.本发明针对上述缺陷,提供一种基于物联网的,采用快速傅里叶变换的周期性及线性性质,将多架无人机的欲接收到的不同实时监测的多次复杂频域信道估计指令(针对多架无人机的协调管理模块发出的飞行状态指令,任务分配模块发出的飞行区域指令以及巡航轨迹模块发出的航行轨迹指令)转换为时域降噪处理的蓝牙通信数据处理模块的快速傅里叶变换算法处理后,可以得到更精确的信道频域响应估计,进而降低了每台无人机接收到的协调管理模块的指令信号、任务分配模块的指令信号和巡航轨迹模块的信号指令的噪声,并能够通过中央处理模块根据实时监测得到的能耗评估模块计算得到的每架无人机的能耗水平统筹所有多架无人机的不同能耗水平(第一能耗水平、第二能耗水平和第三能耗水平)并划分出根据实时变化的能耗水平变化半径的第一圆形巡航区、第二环形巡航区和第三环形巡航区以及规划适应于每架无人机的巡航路径的无人机蓝牙通信系统及方法。
6.本发明提供如下技术方案:一种基于物联网的无人机蓝牙通信系统,所述通信系统用于低空领域下的无人机飞行巡航的通信数据交换,所述低空领域为包括多架无人机共同协作巡航、侦测、采集数据后传输至远程云平台形成的整个系统,所述系统还包括设置于无人机上的蓝牙通信数据接收模块、用于实时监测无人机飞行数据的数据采集模块、能量
实时监测模块,所述云平台包括中央处理模块、协调管理模块、任务分配模块、巡航轨迹规划模块、能耗评估模块;
7.多架无人机上的所述蓝牙通信数据接收模块用于接收远程云平台发射的任务数据,根据云平台中央处理模块的中央处理计算后,所述协调管理模块、所述任务分配模块和所述巡航轨迹模块发出的指令执行任务;
8.所述能耗评估模块,用于根据所述能量实时监测模块所采集到的数据监测多架无人机中每架无人机的飞行巡航状态,实时将监测数据反馈给中央处理模块;
9.所述中央处理模块用于根据能耗评估模块评估得到的多架无人机中的各个无人机的能耗水平所允许的飞行状态,统筹协调多架无人机的能耗水平所允许的飞行状态、飞行任务和巡航轨迹规划,分别发送至所述协调管理模块、任务分配模块和巡航轨迹模块;
10.所述协调管理模块,用于接收中央处理模块的多架无人机能耗水平所允许的飞行状态规划,向多架无人机发出指令,在能耗水平允许的飞行区域内飞行;
11.所述任务分配模块,用于分别控制能耗不足的第一能耗水平的无人机返航,能耗处于中级水平的第二能耗水平的无人机继续飞行巡航领域的较远区域,能耗处于较高水平的第三能耗水平的无人机飞行至巡航领域的边界处;
12.所述巡航轨迹模块,用于控制不同能耗水平内的多架子无人机中每架无人机按照中央处理模块规划的巡航轨迹在能耗水平允许范围内巡航。
13.进一步地,所述系统还包括远程云平台的蓝牙通信数据发射模块、蓝牙数据信号处理模块,所述蓝牙通信数据发射模块用于接收所述协调管理模块、所述任务分配模块和所述巡航轨迹模块发出的指令,然后经过所述蓝牙数据信号处理模块后发射至所述蓝牙通信数据接收模块。
14.进一步地,所述远程云平台还包括云数据管理模块,用于存储多架无人机上的数据采集模块采集到的数据信息。
15.进一步地,所述能量实时监测模块包括电能实时监测采集模块和油量实时监测采集模块。
16.进一步地,所述能耗实时监测模块采集m时刻的第j架无人机电能存余量ej(m)和油量存余量oj(m),所述能耗评估模块计算从第j架无人机被监测的t-k时刻至t时刻这一过程后,第t时刻所述第j架所处的能耗水平lj计算公式如下:
[0017][0018]
其中,为第j架无人机于m时刻电能存余量ej(m)的计算加权系数,第j架无人机于m时刻油量存余量oj(m)的计算加权系数,λ为电能转化为动力的效率,φ为燃油转化为动力的效率,αe(m)为第j架于m时刻无人机电能存余量ej(m)的误差项,βo(m)为第j架于m时刻无人机油量存余量oj(m)的误差项;j=1,2,3,
…
,n;m=t-k,t-k 1,
…
,t。
[0019]
进一步地,所述电能转化为动力的效率λ为40%-50%,所述燃油转化为动力的效率φ为15%-30%。
[0020]
进一步地,所述第一能耗水平为10%-20%,所述第二能耗水平为20%-50%,所述
第三能耗水平为50%-90%。
[0021]
本发明还提供上述系统的一种基于物联网的无人机蓝牙通信方法,包括以下步骤:
[0022]
s101、所述能量实时监测模块实时监测多架无人机的采集m时刻的无人机电能存余量ej(m)和油量存余量oj(m),并通过蓝牙通信数据接收模块传输至所述远程云平台
[0023]
s102、所述云平台的能耗评估模块接收所述s101步骤采集到的m时刻的无人机电能存余量ej(m)和油量存余量oj(m),计算从第j架无人机被监测的t-k时刻至t时刻这一过程后,第t时刻所述第j架所处的能耗水平lj,并将计算结果传输至所述中央处理模块;
[0024]
s103、所述中央处理模块统计多架无人机m时刻的能耗水平,计算得到处于所述第一能耗水平的无人机所占比重x、处于所述第二能耗水平的无人机所占比重y、处于所述第三能耗水平的无人机所占比重z,x y z=1,按照多架无人机巡航所在区域由中心点o占整个所述区域半径的长度r的不同比例划分第一圆形巡航区,第二环形巡航区和第三环形巡航区;所述第一圆形巡航区为圆形,第一圆形巡航区的半径为r1;所述第二环形巡航区为环形,内半径为第一圆形巡航区的半径,外半径为第二半径为r2;所述第三环形巡航区为环形,内半径为第二环形半径r2,外半径为第三半径r3;
[0025]
所述中央计算模块计算多架无人机台在所述第一圆形巡航区、第二巡航区和第三巡航区内的巡航数量,以及根据实时变化的每一时刻m所述第一能耗水平的无人机所占比重x、处于所述第二能耗水平的无人机所占比重y、处于所述第三能耗水平的无人机所占比重z的不同采用粒子群优化算法进行不断迭代优化而进行动态调整,并计算多架无人机在所述第一圆形巡航区、第二巡航区和第三巡航区内的多架子无人机中每架无人机的巡航轨迹;
[0026]
将每架无人机的能耗水平发送至协调管理模块,将多架无人机在所述第一圆形巡航区、第二巡航区和第三巡航区内的巡航数量发送至所述任务分配模块,将多架无人机在所述第一圆形巡航区、第二巡航区和第三巡航区内的多架子无人机中每架无人机的巡航轨迹发送至所述巡航轨迹模块;
[0027]
s104、所述协调管理模块接收中央处理模块的多架无人机的能耗水平所允许的飞行状态,向多架无人机发出指令协调多架无人机在能耗水平允许的飞行区域内飞行;所述任务分配模块接收中央处理模块的指令,分别控制能耗不足的第一能耗水平的无人机返航,能耗处于中级水平的第二能耗水平的无人机继续飞行巡航领域的较远区域,能耗处于较高水平的第三能耗水平的无人机飞行至巡航领域的边界处;所述巡航轨迹模块接收中央处理模块的指令,控制多架子无人机中的每架无人机的巡航轨迹按照所述巡航轨迹在能耗水平允许范围内巡航。
[0028]
进一步地,所述第一圆形巡航区的半径所述第二环形巡航区的第二半径所述第三环形区的第三半径
[0029]
进一步地,所述协调管理模块、所述任务分配模块和所述巡航轨迹模块在将控制指令发送至多架无人机上设置的蓝牙通信数据接收模块前,通过所述蓝牙数据信号处理模块采用快速傅里叶变换算法将所述协调管理模块、所述任务分配模块和所述巡航轨迹模块三个频域信道的信号转换为时域信号,进行降噪处理,然后再将降噪后的时域信号传输至
所述蓝牙通信数据发射模块传输至所述蓝牙通信数据接收模块,进而控制所述多架无人机中的每架无人机的飞行;
[0030]
所述蓝牙通信数据处理模块的快速傅里叶变化算法包括以下步骤:
[0031]
1)将三个频域信道的信号,构建信道刺激响应模型k(g,ε):
[0032]
k(g,ε)=∑qγq(g)ρ(ε-εq);
[0033]
其中,γq(g)为第q条信号传输路径的幅度值,满足平稳高斯随机过程,q=1,2,3,分别代表所述协调管理模块的信号传输路径的第一路径,所述任务分配模块的信号传输路径的第二路径,所述巡航轨迹模块的信号传输路径的第三路径,γq(g)相互独立;ε为所在第q条路径的信号传输时间,εq为所在第q条路径的时延;ρ(
·
)为所在第q条路径信号传输刺激响应时差计算;g为信号传输的第g时刻;且∑qe[γq(g)|2ρ(ε-εq)]=1;
[0034]
2)构建三个频域信道的频域计算模型:
[0035][0036]
3)在理想的符号同步和采样时钟同步条件下,插入循环前缀后,将离散时域上的三条路径信道对信号的线性卷积x(i)转换为循环卷积y(i),此时通过信道的信号经过采样得到的具有循环卷积y(i)的接收信号为:
[0037][0038]
其中k(i)为根据所述步骤1)构建的信道刺激响应模型计算得到的卷积转换信道刺激响应值,v(i)为噪声信号在卷积转换过程中的信号值;
[0039]
4)经过所述快速傅里叶变换算法最终得到的所述蓝牙通信数据发射模块所要发射的频域信号为:
[0040]yq
=kqxq vq;
[0041]
其中,kq为根据所述步骤2)构建的三个频域信道的频域计算模型计算得到的信道频域刺激响应值,vq为所述噪声信号在最终快速傅里叶变换过程中的噪声频域信号值。
[0042]
本发明的有益效果为:
[0043]
1、根据处于第一能耗水平的无人机所占比重x,第二能耗水平无人机所占比重y,第三能耗水平的无人机所占比重z规划航行路线,将区域由中心点o占整个区域半径的长度r的长度为划分环形巡航区域,进而中央计算模块计算多台无人机h台在r1半径内的巡航数量,r2半径内的巡航数量以及r3半径内的巡航数量,若并根据每一时刻m第一能耗水平、第二能耗水平以及第三能耗水平y所占比重的不同而进行动态调整,进行不断迭代优化,最终可以根据每个无人机的能耗情况以及占所有巡航无人机的比重,实时协调调整整个巡航区域内的无人机的巡航数量和范围,有的放矢。
[0044]
2、本发明通过在云平台设置接收所述三个模块的蓝牙通信数据处理模块,采用快速傅里叶变换算法处理协调管理模块、任务分配模块和巡航轨迹模块三个模块的频域指令通信信号,能够实现在多架无人机集群网内节点数量众多,同时云平台欲发射出的协调管理无人机飞行状态、飞行区域任务以及飞行航迹的指令通信信号共享同一无线蓝牙传输信道的需求下,通过蓝牙通信数据处理模块利用完整的一帧训练数据实现信号同步和信道估计,利用快速傅里叶变换算法将多次频域信道估计转换为时域降噪处理后,再转换为频域最终由蓝牙通信数据发射模块发出,降低了实现的复杂度,能得到更精确的信道频域响应
估计值,能够实现节点采用突发通信模式,通信时间短,要求链路在较短时间内完成同步的技术效果。
附图说明
[0045]
在下文中将基于实施例并参考附图来对本发明进行更详细的描述。其中:
[0046]
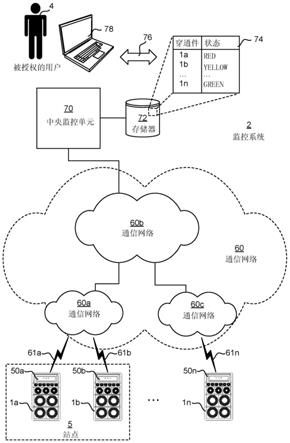
图1为本发明提供的基于物联网的无人机蓝牙通信系统整体示意图;
[0047]
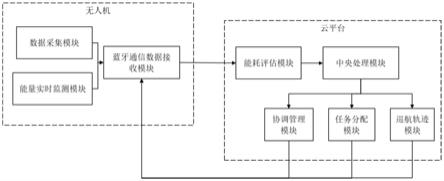
图2为本发明实施例1提供的基于物联网的无人机蓝牙通信系统结构示意图;
[0048]
图3为本发明实施例2提供的基于物联网的无人机蓝牙通信系统示意图;
[0049]
图4为本发明实施例2提供的能量实时监测模块结构示意图;
[0050]
图5为本发明实施例4提供的多架无人机巡航所在区域由中心点o占整个所述区域半径的长度r的不同比例划分的第一圆形巡航区,第二环形巡航区和第三环形巡航区结构示意图;
[0051]
图6为本发明实施例5提供的蓝牙通信数据处理模块的快速傅里叶变化算法流程示意图。
具体实施方式
[0052]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0053]
实施例1
[0054]
如图1-2所示,为本实施例提供的一种基于物联网的无人机蓝牙通信系统,通信系统用于低空领域下的无人机飞行巡航的通信数据交换,低空领域为包括多架无人机共同协作巡航、侦测、采集数据后传输至远程云平台形成的整个系统,其特征在于,系统还包括设置于无人机上的蓝牙通信数据接收模块、用于实时监测无人机飞行数据的数据采集模块、能量实时监测模块,云平台包括中央处理模块、协调管理模块、任务分配模块、巡航轨迹规划模块、能耗评估模块;
[0055]
多架无人机上的蓝牙通信数据接收模块用于接收远程云平台发射的任务数据,根据云平台中央处理模块的中央处理计算后,协调管理模块、任务分配模块和巡航轨迹模块发出的指令执行任务;
[0056]
能耗评估模块,用于根据能量实时监测模块所采集到的数据监测多架无人机中每架无人机的飞行巡航状态,实时将监测数据反馈给中央处理模块;
[0057]
中央处理模块用于根据能耗评估模块评估得到的多架无人机中的各个无人机的能耗水平所允许的飞行状态,统筹协调多架无人机的能耗水平所允许的飞行状态、飞行任务和巡航轨迹规划,分别发送至协调管理模块、任务分配模块和巡航轨迹模块;
[0058]
协调管理模块,用于接收中央处理模块的多架无人机能耗水平所允许的飞行状态规划,向多架无人机发出指令,在能耗水平允许的飞行区域内飞行;
[0059]
任务分配模块,用于分别控制能耗不足的第一能耗水平的无人机返航,能耗处于中级水平的第二能耗水平的无人机继续飞行巡航领域的较远区域,能耗处于较高水平的第
三能耗水平的无人机飞行至巡航领域的边界处;
[0060]
巡航轨迹模块,用于控制不同能耗水平内的多架子无人机中每架无人机按照中央处理模块规划的巡航轨迹在能耗水平允许范围内巡航。
[0061]
实施例2
[0062]
如图1-2所示,为本实施例提供的一种基于物联网的无人机蓝牙通信系统,通信系统用于低空领域下的无人机飞行巡航的通信数据交换,低空领域为包括多架无人机共同协作巡航、侦测、采集数据后传输至远程云平台形成的整个系统,其特征在于,系统还包括设置于无人机上的蓝牙通信数据接收模块、用于实时监测无人机飞行数据的数据采集模块、能量实时监测模块,云平台包括中央处理模块、协调管理模块、任务分配模块、巡航轨迹规划模块、能耗评估模块;
[0063]
多架无人机上的蓝牙通信数据接收模块用于接收远程云平台发射的任务数据,根据云平台中央处理模块的中央处理计算后,协调管理模块、任务分配模块和巡航轨迹模块发出的指令执行任务;
[0064]
能耗评估模块,用于根据能量实时监测模块所采集到的数据监测多架无人机中每架无人机的飞行巡航状态,实时将监测数据反馈给中央处理模块;
[0065]
中央处理模块用于根据能耗评估模块评估得到的多架无人机中的各个无人机的能耗水平所允许的飞行状态,统筹协调多架无人机的能耗水平所允许的飞行状态、飞行任务和巡航轨迹规划,分别发送至协调管理模块、任务分配模块和巡航轨迹模块;
[0066]
协调管理模块,用于接收中央处理模块的多架无人机能耗水平所允许的飞行状态规划,向多架无人机发出指令,在能耗水平允许的飞行区域内飞行;
[0067]
任务分配模块,用于分别控制能耗不足的第一能耗水平的无人机返航,能耗处于中级水平的第二能耗水平的无人机继续飞行巡航领域的较远区域,能耗处于较高水平的第三能耗水平的无人机飞行至巡航领域的边界处;
[0068]
巡航轨迹模块,用于控制不同能耗水平内的多架子无人机中每架无人机按照中央处理模块规划的巡航轨迹在能耗水平允许范围内巡航。
[0069]
如图3所示,本实施例提供的系统还包括远程云平台的蓝牙通信数据发射模块、蓝牙数据信号处理模块,蓝牙通信数据发射模块用于接收协调管理模块、任务分配模块和巡航轨迹模块发出的指令,然后经过蓝牙数据信号处理模块后发射至蓝牙通信数据接收模块。远程云平台还包括云数据管理模块,用于存储多架无人机上的数据采集模块采集到的数据信息。
[0070]
如图4所示,本实施例提供的能量实时监测模块包括电能实时监测采集模块和油量实时监测采集模块,能耗实时监测模块采集m时刻的第j架无人机电能存余量ej(m)和油量存余量oj(m),能耗评估模块计算从第j架无人机被监测的t-k时刻至t时刻这一过程后,第t时刻第j架所处的能耗水平lj计算公式如下:
[0071][0072]
其中,为第j架无人机于m时刻电能存余量ej(m)的计算加权系数,第j架无人
机于m时刻油量存余量oj(m)的计算加权系数,λ为电能转化为动力的效率,φ为燃油转化为动力的效率,αe(m)为第j架于m时刻无人机电能存余量ej(m)的误差项,βo(m)为第j架于m时刻无人机油量存余量oj(m)的误差项;j=1,2,3,
…
,n;m=t-k,t-k 1,
…
,t。
[0073]
电能转化为动力的效率λ为40%-50%,燃油转化为动力的效率φ为15%-30%。
[0074]
实施例3
[0075]
在实施例1或实施例2的基础上,第一能耗水平为10%-20%,第二能耗水平为20%-50%,第三能耗水平为50%-90%。
[0076]
实施例4
[0077]
本实施例还提供采用上述实施例提供的系统的一种基于物联网的无人机蓝牙通信方法,包括以下步骤:
[0078]
s101、能量实时监测模块实时监测多架无人机的采集m时刻的无人机电能存余量ej(m)和油量存余量oj(m),并通过蓝牙通信数据接收模块传输至远程云平台
[0079]
s102、云平台的能耗评估模块接收s101步骤采集到的m时刻的无人机电能存余量ej(m)和油量存余量oj(m),计算从第j架无人机被监测的t-k时刻至t时刻这一过程后,第t时刻第j架所处的能耗水平lj,并将计算结果传输至中央处理模块;
[0080]
s103、中央处理模块统计多架无人机m时刻的能耗水平,计算得到处于第一能耗水平的无人机所占比重x、处于第二能耗水平的无人机所占比重y、处于第三能耗水平的无人机所占比重z,x y z=1,如图5所示,按照多架无人机巡航所在区域由中心点o占整个区域半径的长度r的不同比例划分第一圆形巡航区,第二环形巡航区和第三环形巡航区;第一圆形巡航区为圆形,第一圆形巡航区的半径为r1;第二环形巡航区为环形,内半径为第一圆形巡航区的半径,外半径为第二半径为r2;第三环形巡航区为环形,内半径为第二环形半径r2,外半径为第三半径r3;
[0081]
中央计算模块计算多架无人机h台在第一圆形巡航区、第二巡航区和第三巡航区内的巡航数量,以及根据实时变化的每一时刻m第一能耗水平的无人机所占比重x、处于第二能耗水平的无人机所占比重y、处于第三能耗水平的无人机所占比重z的不同采用粒子群优化算法进行不断迭代优化而进行动态调整,并计算多架无人机在第一圆形巡航区、第二巡航区和第三巡航区内的多架子无人机中每架无人机的巡航轨迹;
[0082]
将每架无人机的能耗水平发送至协调管理模块,将多架无人机在第一圆形巡航区、第二巡航区和第三巡航区内的巡航数量发送至任务分配模块,将多架无人机在第一圆形巡航区、第二巡航区和第三巡航区内的多架子无人机中每架无人机的巡航轨迹发送至巡航轨迹模块;
[0083]
s104、协调管理模块接收中央处理模块的多架无人机的能耗水平所允许的飞行状态,向多架无人机发出指令协调多架无人机在能耗水平允许的飞行区域内飞行;任务分配模块接收中央处理模块的指令,分别控制能耗不足的第一能耗水平的无人机返航,能耗处于中级水平的第二能耗水平的无人机继续飞行巡航领域的较远区域,能耗处于较高水平的第三能耗水平的无人机飞行至巡航领域的边界处;巡航轨迹模块接收中央处理模块的指令,控制多架子无人机中的每架无人机的巡航轨迹按照巡航轨迹在能耗水平允许范围内巡航。
[0084]
第一圆形巡航区的半径第二环形巡航区的第二半径第三环形区的第三半径
[0085]
实施例5
[0086]
在实施例4的基础上,如图6所示,协调管理模块、任务分配模块和巡航轨迹模块在将控制指令发送至多架无人机上设置的蓝牙通信数据接收模块前,通过蓝牙数据信号处理模块采用快速傅里叶变换算法将协调管理模块、任务分配模块和巡航轨迹模块三个频域信道的信号转换为时域信号,进行降噪处理,然后再将降噪后的时域信号传输至蓝牙通信数据发射模块传输至蓝牙通信数据接收模块,进而控制多架无人机中的每架无人机的飞行;
[0087]
蓝牙通信数据处理模块的快速傅里叶变化算法包括以下步骤:
[0088]
1)将三个频域信道的信号,构建信道刺激响应模型k(g,ε):
[0089]
k(g,ε)=∑qγq(g)ρ(ε-εq);
[0090]
其中,γq(g)为第q条信号传输路径的幅度值,满足平稳高斯随机过程,q=1,2,3,分别代表协调管理模块的信号传输路径的第一路径,任务分配模块的信号传输路径的第二路径,巡航轨迹模块的信号传输路径的第三路径,γq(g)相互独立;ε为所在第q条路径的信号传输时间,εq为所在第q条路径的时延;ρ(
·
)为所在第q条路径信号传输刺激响应时差计算;g为信号传输的第g时刻;且∑qe[γq(g)|2ρ(ε-εq)]=1;
[0091]
2)构建三个频域信道的频域计算模型:
[0092][0093]
3)在理想的符号同步和采样时钟同步条件下,插入循环前缀后,将离散时域上的三条路径信道对信号的线性卷积x(i)转换为循环卷积y(i),此时通过信道的信号经过采样得到的具有循环卷积y(i)的接收信号为:
[0094][0095]
其中k(i)为根据步骤1)构建的信道刺激响应模型计算得到的卷积转换信道刺激响应值,v(i)为噪声信号在卷积转换过程中的信号值;
[0096]
4)经过快速傅里叶变换算法最终得到的蓝牙通信数据发射模块所要发射的频域信号为:
[0097]yq
=kqxq vq;
[0098]
其中,kq为根据步骤2)构建的三个频域信道的频域计算模型计算得到的信道频域刺激响应值,vq为噪声信号在最终快速傅里叶变换过程中的噪声频域信号值。
[0099]
快速傅里叶变换算法利用训练帧完成了信号同步及信道响应估计,通过将频域多次估计转换为时域对接收信号进行降噪处理,实现简单,在不增加系统开销的情况下提高了系统信道估计精度,定时准确,频率估计误差较小。
[0100]
本发明提供的系统及方法能够在进行任务规划时,明确任务的类型、完成任务的区域和时间;而且能够有效对巡航区域中的环境、目标和事态进行准确分析;以及要能够在保证最小代价的情况下,完成最大的收益,从而进行约束条件的设定、数据的评估、分配方案的确定和飞行轨迹的规划。有效解决在任务规划时,多无人机协同巡航面临多个作战目标和多个巡航任务的技术问题,有效实现在任务规划时遵循价值高目标优先原则,距离近
目标优先原则,任务执行时间短优先原则,委派无人机数量少优先原则。
[0101]
虽然已经参考优选实施例对本发明进行了描述,但在不脱离本发明的范围的情况下,可以对其进行各种改进并且可以用等效物替换其中的部件。尤其是,只要不存在结构冲突,各个实施例中所提到的各项技术特征均可以任意方式组合起来。本发明并不局限于文中公开的特定实施例,而是包括落入权利要求的范围内的所有技术方案。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。