1.本技术涉及机器视觉技术领域,具体而言涉及形状匹配方法、形状匹配装置、计算机设备及存储装置。
背景技术:
2.机器视觉就是用机器代替人眼来做测量和判断,在机器视觉中通常采用的匹配方法为模板匹配。模板匹配可以分为灰度匹配和形状匹配。在进行形状匹配时,需要先制作待识别目标对象的模板图像,然后将模板图像放置在待匹配区域图像中进行遍历搜索,以将模板图像与待匹配区域图像进行比对。
3.由于模板图像以及待匹配区域图像的片尺寸较大,在实际进行形状匹配时,都是先对模板图像以及待匹配区域图像提取图像金字塔,在待匹配区域图像的图像金字塔最顶层进行匹配找到待匹配区域图像的图像金字塔最顶层的匹配位置,再一层层的将待匹配区域图像的图像金字塔的上一层的匹配位置映射到待匹配区域图像的图像金字塔的下一层,得到待匹配区域图像的图像金字塔的下一层的候选区域,并在待匹配区域图像的图像金字塔的下一层的候选区域中与模板图像的图像金字塔中的同层进行匹配,得到待匹配区域图像的图像金字塔的下一层的匹配位置,直到第1层图像。
4.现有的形状匹配,存在匹配速度较慢的问题。
技术实现要素:
5.有鉴于此,为解决上述技术问题,本技术提供形状匹配方法、装置、计算机设备以及存储装置。
6.为实现上述目的,本技术提供一种形状匹配方法,该形状匹配方法包括:
7.对模板图像进行n-1次向下采样,得到包含n层图像的第一图像金字塔,以及对待匹配区域图像进行n-1次向下采样,得到包含n层图像的第二图像金字塔,第一图像金字塔的第1层图像为模板图像,第二图像金字塔的第1层图像为待匹配区域图像,n为大于或等于2的整数;
8.获取第二图像金字塔的第n层图像中的全部像素点的x方向梯度及y方向梯度、以及预设对比度;
9.根据第二图像金字塔的第n层图像中全部像素点的x方向梯度及y方向梯度计算第二图像金字塔的第n层图像中的各像素点的梯度幅值;
10.根据预设对比度、以及第二图像金字塔的第n层图像中的各像素点的梯度幅值,确定用于描述第二图像金字塔的第n层图像中的边缘点的全部概率位置的掩模图像作为第二图像金字塔的第n层图像的边缘概率位置掩模图像;
11.根据第一图像金字塔的第n层图像的边缘点的数量及分布范围信息、以及第二图像金字塔的第n层图像的边缘概率位置掩模图像,确定用于描述第二图像金字塔的第n层图像中的全部概率匹配位置的掩模图像作为第二图像金字塔的第n层图像的概率匹配位置掩
模图像;
12.以第二图像金字塔的第n层图像的概率匹配位置掩模图像描述的全部概率匹配位置所在区域作为第二图像金字塔的第n层图像的目标匹配区域,计算第一图像金字塔的第n层图像在第二图像金字塔的第n层图像的目标匹配区域中的相关性得分作为第n层图像匹配得分,将第n层图像匹配得分中大于预设得分阀值的相关性得分所对应的像素点作为第n层图像匹配结果;
13.根据第i层图像的匹配结果映射得到第二图像金字塔的第i-1层图像的目标匹配区域,计算第一图像金字塔的第i-1层图像在第二图像金字塔的第i-1层图像的目标匹配区域中的相关性得分作为第i-1层图像匹配得分,将第i-1层图像匹配得分中大于预设得分阀值的相关性得分所对应的像素点作为第i-1层图像匹配结果;其中,3≤i≤n且i为整数;
14.根据第2层图像的匹配结果映射得到待匹配区域图像的目标匹配区域,计算模板图像在待匹配区域图像的目标匹配区域中的相关性得分作为第1层图像匹配得分,将第1层图像匹配得分中最大相关性得分所对应的像素点作为待匹配区域图像与模板图像的匹配结果输出。
15.为了解决上述技术问题,本技术采用的另一个技术方案是提供了一种形状匹配装置,该形状匹配装置包括图像金字塔生成模块、掩模图像生成模块以及匹配模块,其中,
16.图像金字塔生成模块,用于对模板图像进行n-1次向下采样,得到包含n层图像的第一图像金字塔,以及对待匹配区域图像进行n-1次向下采样,得到包含n层图像的第二图像金字塔,第一图像金字塔的第1层图像为模板图像,第二图像金字塔的第1层图像为待匹配区域图像,n为大于或等于2的整数;
17.掩模图像生成模块,用于获取第二图像金字塔的第n层图像中的全部像素点的x方向梯度及y方向梯度、以及预设对比度;
18.掩模图像生成模块,还用于根据第二图像金字塔的第n层图像中全部像素点的x方向梯度及y方向梯度计算第二图像金字塔的第n层图像中的各像素点的梯度幅值;
19.掩模图像生成模块,还用于根据预设对比度、以及第二图像金字塔的第n层图像中的各像素点的梯度幅值,确定用于描述第二图像金字塔的第n层图像中的边缘点的全部概率位置的掩模图像作为第二图像金字塔的第n层图像的边缘概率位置掩模图像;
20.掩模图像生成模块,还用于根据第一图像金字塔的第n层图像的边缘点的数量及分布范围信息、以及第二图像金字塔的第n层图像的边缘概率位置掩模图像,确定用于描述第二图像金字塔的第n层图像中的全部概率匹配位置的掩模图像作为第二图像金字塔的第n层图像的概率匹配位置掩模图像;
21.匹配模块,用于以第二图像金字塔的第n层图像的概率匹配位置掩模图像描述的全部概率匹配位置所在区域作为第二图像金字塔的第n层图像的目标匹配区域,计算第一图像金字塔的第n层图像在第二图像金字塔的第n层图像的目标匹配区域中的相关性得分作为第n层图像匹配得分,将第n层图像匹配得分中大于预设得分阀值的相关性得分所对应的像素点作为第n层图像匹配结果;
22.匹配模块,还用于根据第i层图像的匹配结果映射得到第二图像金字塔的第i-1层图像的目标匹配区域,计算第一图像金字塔的第i-1层图像在第二图像金字塔的第i-1层图像的目标匹配区域中的相关性得分作为第i-1层图像匹配得分,将第i-1层图像匹配得分中
大于预设得分阀值的相关性得分所对应的像素点作为第i-1层图像匹配结果;其中,3≤i≤n且i为整数;
23.匹配模块,还用于根据第2层图像的匹配结果映射得到待匹配区域图像的目标匹配区域,计算模板图像在待匹配区域图像的目标匹配区域的中相关性得分作为第1层图像匹配得分,将第1层图像匹配得分中最大相关性得分所对应的像素点作为待匹配区域图像与模板图像的匹配结果输出。
24.为了解决上述技术问题,本技术采用的另一个技术方案是提供了一种计算机设备,该计算机设备包括存储器以及处理器,其中,存储器存储有程序数据;程序数据能够被处理器执行以实现上述中任意一项的方法。
25.为了解决上述技术问题,本技术采用的另一个技术方案是提供了一种存储装置,存储装置存储有程序数据,程序数据能够被处理器执行以实现上述中任意一项的方法。
26.有益效果:区别于现有技术,本技术在第n层图像进行匹配时,通过确定第二图像金字塔的第n层图像的边缘概率位置掩模图像,根据第一图像金字塔的第n层图像的边缘点的数量及分布范围信息、以及第二图像金字塔的第n层图像的边缘概率位置掩模图像,确定第二图像金字塔的第n层图像的概率匹配位置掩模图像;以第二图像金字塔的第n层图像的概率匹配位置掩模图像描述的全部概率匹配位置所在区域作为第二图像金字塔的第n层图像的目标匹配区域,继而根据目标匹配区域完成后续的匹配运算,相对于在整个第二图像金字塔的第n层图像进行遍历搜索,本技术减少计算量,从而加快了匹配速度。
附图说明
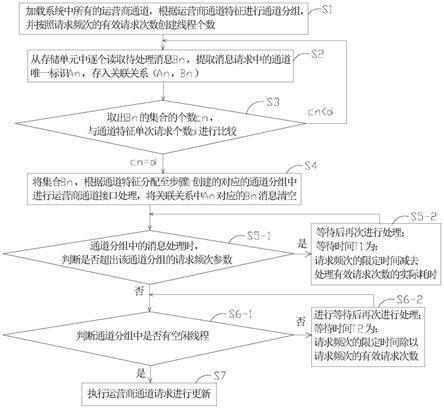
27.图1是本技术的形状匹配方法实施例的流程的前段的示意图;
28.图2是本技术的形状匹配方法实施例的流程的后段的示意图;
29.图3是本技术的形状匹配方法实施例的模板图像以及待匹配区域图像的示意图;
30.图4是本技术的形状匹配方法实施例的第一图像金字塔和第二图像金字塔的示意图;
31.图5是本技术的形状匹配方法实施例的第一图像金字塔的第n层图像以及第二图像金字塔的第n层图像的示意图;
32.图6是本技术的形状匹配方法实施例的第一图像金字塔的第n层图像的边缘图像以及第二图像金字塔的第n层图像的边缘概率位置掩膜图像的示意图;
33.图7是本技术的形状匹配方法实施例的第二图像金字塔的第n层图像的边缘概率位置掩膜图中的其中一正方形比对区域的位置示意图;
34.图8是本技术的形状匹配方法实施例的第n层图像的边缘概率位置掩膜图像中的其中另一正方形比对区域的位置示意图;
35.图9是本技术的形状匹配方法实施例的第二图像金字塔的第n层图像的边缘概率位置掩膜图像中的其中又一正方形比对区域的位置示意图;
36.图10是本技术的形状匹配方法实施例的步骤s152中得到的第二图像金字塔的第n层图像的概率匹配位置掩膜图像的示意图;
37.图11是本技术的形状匹配方法实施例的第二图像金字塔的第n层图像中的目标匹配区域的示意图;
38.图12是本技术的形状匹配装置的结构示意图;
39.图13是本技术的计算机设备实施例的结构示意图;
40.图14是本技术的存储装置实施例的结构示意图。
具体实施方式
41.为使本领域的技术人员更好地理解本技术的技术方案,下面结合附图和具体实施方式对本技术做进一步详细描述。显然,所描述的实施方式仅仅是本技术的一部分实施方式,而不是全部的实施方式。基于本技术中的实施方式,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施方式,均属于本技术保护的范围。
42.请参阅图1-图2,图1是本技术的形状匹配方法实施例的流程的前段的示意图,图2是本技术的形状匹配方法实施例的流程的后段的示意图,如图1-图2所示,本技术形状匹配方法至少包括以下步骤:
43.步骤s110:对模板图像进行n-1次向下采样,得到包含n层图像的第一图像金字塔,以及对待匹配区域图像进行n-1次向下采样,得到包含n层图像的第二图像金字塔。
44.以图3-图4为例进行说明,图3是本技术的形状匹配方法实施例的模板图像以及待匹配区域图像的示意图;图4是本技术的形状匹配方法实施例的第一图像金字塔和第二图像金字塔的示意图。
45.图3中标记为100的是模板图像,标记为200的为待匹配区域图像。由于模板图像100和待匹配区域图像200图片尺寸较大,在实际进行匹配时,都是先对原图像向下采样,得到图像金字塔。当原图为模板图像100时,得到的图像金字塔为如图4所示的第一图像金字塔a,当原图为待匹配区域图像200时,得到的图像金字塔为如图4所示的第二图像金字塔b。第一图像金字塔a和第二图像金字塔b可以均有n层图像,n为大于或等于2的整数。如图4所示,第一图像金字塔a的第1层图像a1是模板图像100,第二图像金字塔b的第1层图像b1是待匹配区域图像200。第一图像金字塔a的n层图像是模板图像100向下采样n-1次得到的,第二图像金字塔b的n层图像是待匹配区域图像200向下采样n-1次得到的。图像金字塔可以是由原图像及原图像缩小至原始尺寸的1/2,1/4,1/8
……
的图像的集合。对于具有n层图像的图像金字塔,第1层图像也称为底层图像,第n层图像也称为顶层图像。从第1层图像到第n层图像的方向上,第1层图像之上的图像的面积可以为下一层图像的面积的四分之一。例如,在一个应用例中,第1层图像至第n层图像的面积可以依次为:其中,m为第一层图像的宽度,n为第一层图像的高度。
46.原图像向下采样,一般有两种采样方法,分别为高斯采样和拉普拉斯采样,其中,用高斯采样所形成的图像金字塔为高斯金字塔,用拉普拉斯采样所形成的图像金字塔为拉普拉斯金字塔。高斯采样与拉普拉斯采样的区别在于,高斯采样使用低通(高斯)滤波,而拉普拉斯采样使用带通(拉普拉斯)滤波。相较于带通滤波,低通滤波的实现更简单一些,且使用何种滤波对模板匹配的应用效果并无明显影响,本实施例中以高斯采样为例进行说明。
47.具体地,原图像向下采样的过程中对于给定的第j层图像gj,可以通过以下步骤s111至步骤s112得到第j 1层图像g
j 1
,其中1≤j≤n。
48.步骤s111:使用高斯内核对第j层图像gj进行平滑滤波(卷积),高斯内核如下式(1)所示:
[0049][0050]
步骤s112:移除第j层图像gj的所有偶数行和偶数列,得到第j 1层图像g
j 1
。
[0051]
在本步骤中将第j层图像gj的偶数行和偶数列移除后,得到的第j 1层图像g
j 1
的长度是移除前第j层图像gj的长度的二分之一,得到的第j 1层图像g
j 1
的宽度是移除前第j层图像gj的宽度的二分之一。即第j 1层图像g
j 1
的面积为第j层图像gj的面积的四分之一。
[0052]
步骤s120:获取第二图像金字塔的第n层图像中的全部像素点的x方向梯度及y方向梯度、以及预设对比度。
[0053]
在本步骤中,可以通过sobel算子计算第二图像金字塔的第n层图像中的各个像素点的x方向梯度及y方向梯度。
[0054]
预设对比度可以是用户预先输入的参数,如果待匹配区域图像的边缘分明,该预设对比度可以设置得高一些,如果待匹配区域图像的边缘对比度不大,即待匹配区域图像的边缘比较模糊,则该预设对比度可以设置得小一些。
[0055]
在其中一实施方式中,预设对比度可以是最小可分辨对比度(minimum resolvable contrast,即mrc)。关于最小可分辨对比度,可以查阅现有技术中的相关描述。
[0056]
步骤s130:根据第二图像金字塔的第n层图像中全部像素点的x方向梯度及y方向梯度计算第二图像金字塔的第n层图像中的各像素点的梯度幅值。
[0057]
在本步骤中,第二图像金字塔的第n层图像中的像素点的梯度幅值满足以下公式(2):
[0058][0059]
其中,|gf(μn,νn)|为第二图像金字塔的第n层图像中的坐标为(μn,νn)的像素点的梯度幅值,为第二图像金字塔的第n层图像中的坐标为(μn,νn)的像素点的x方向梯度,为第二图像金字塔的第n层图像中的坐标为(μn,νn)的像素点的y方向梯度。
[0060]
步骤s140:根据预设对比度、以及第二图像金字塔的第n层图像中的各像素点的梯度幅值,确定用于描述第二图像金字塔的第n层图像中的边缘点的全部概率位置的掩模图像作为第二图像金字塔的第n层图像的边缘概率位置掩模图像。
[0061]
本步骤中,由于一像素点对应的梯度幅值越小,该像素点是边缘点的可能性就越小,是噪声的可能性就越大,一像素点对应的梯度幅值越大,该像素点是边缘点的可能性就越大,是噪声的可能性就越小。当一像素点的梯度幅值小于预设对比度时,该像素点就不可能是边缘点,当一像素点的梯度幅值大于预设对比度时,该像素点就可能是边缘点。本步骤中可以通过将第二图像金字塔的第n层图像中的像素点的梯度幅值与预设对比度进行比
较,将大于预设对比度的梯度幅值在第二图像金字塔的第n层图像中所对应的像素点作为边缘点的概率位置,根据第二图像金字塔的第n层图像中的边缘点的全部概率位置,生成用于描述第二图像金字塔的第n层图像中的边缘点的全部概率位置的掩模图像作为第二图像金字塔的第n层图像的边缘概率位置掩模图像。
[0062]
以图5-图6为例进行说明,图5是本技术的形状匹配方法实施例的第一图像金字塔的第n层图像以及第二图像金字塔的第n层图像的示意图;图6是本技术的形状匹配方法实施例的第一图像金字塔的第n层图像的边缘图像以及第二图像金字塔的第n层图像的边缘概率位置掩膜图像的示意图。具体地,在第二图像金字塔的第n层图像bn的边缘概率位置掩模图像bn1中,用于描述第二图像金字塔的第n层图像bn中的边缘点的概率位置的像素点的灰度值为1(白色),除用于描述第二图像金字塔的第n层图像bn中的边缘点的概率位置的像素点之外的像素点的灰度值为0(黑色)。从而,在第二图像金字塔的第n层图像bn的边缘概率位置掩模图像bn1中,全部灰度值为1的像素点即描述了第二图像金字塔的第n层图像bn中的边缘点的全部概率位置。
[0063]
步骤s150:根据第一图像金字塔的第n层图像的边缘点的数量及分布范围信息、以及第二图像金字塔的第n层图像的边缘概率位置掩模图像,确定用于描述第二图像金字塔的第n层图像中的全部概率匹配位置的掩模图像作为第二图像金字塔的第n层图像的概率匹配位置掩模图像。
[0064]
概率匹配位置,即是可能出现匹配结果的位置。
[0065]
进一步地,步骤s150可以包括步骤s151至步骤s152。
[0066]
步骤s151:根据第一图像金字塔的第n层图像的边缘点的数量及分布范围信息,获取第一图像金字塔的第n层图像在第二图像金字塔的第n层图像的边缘概率位置掩模图像的匹配位置作为第二图像金字塔的第n层图像的概率匹配位置。
[0067]
进一步地,步骤s151可以包括步骤s1511至步骤s1514。
[0068]
步骤s1511:获取第一图像金字塔的第n层图像的边缘点的数量及图像边框的对角线的长度。
[0069]
在本实施例中可以通过canny算子对第一图像金字塔的第n层图像进行边缘检测,获取第一图像金字塔的第n层图像的全部边缘点,并记录第一图像金字塔的第n层图像的边缘点的个数。
[0070]
以图5-图6为例进行说明,通过canny算子获取到的第一图像金字塔的第n层图像an的全部边缘点可以以第一图像金字塔的第n层图像an的边缘图像an1的形式存在,通过计算第一图像金字塔的第n层图像an的边缘图像an1中边缘点的个数,以得到第一图像金字塔的第n层图像的边缘点的个数。
[0071]
步骤s1512:根据第一图像金字塔的第n层图像的图像边框的对角线的长度,确定正方形比对区域的边长。
[0072]
步骤s1513:对第二图像金字塔的第n层图像的边缘概率位置掩模图像中的各正方形比对区域进行遍历,计算各正方形比对区域内包含的用于描述边缘点的概率位置的像素点的数量作为比对点数量,并将比对点数量分别赋予对应正方形比对区域中的像素点。
[0073]
以图6-图9为例进行说明,图7是本技术的形状匹配方法实施例的第二图像金字塔的第n层图像的边缘概率位置掩膜图中的其中一正方形比对区域的位置示意图;
[0074]
图8是本技术的形状匹配方法实施例的第n层图像的边缘概率位置掩膜图像中的其中另一正方形比对区域的位置示意图;图9是本技术的形状匹配方法实施例的第二图像金字塔的第n层图像的边缘概率位置掩膜图像中的其中又一正方形比对区域的位置示意图。
[0075]
定义正方形比对区域c为第二图像金字塔的第n层图像的边缘概率位置掩模图像bn1中的任意一正方形区域。正方形对比区域的边长可以等于第一图像金字塔的第n层图像的图像边框的对角线的长度。
[0076]
一具体实施例中,如图6-图9所示,将比对点数量赋予对应正方形比对区域c的左上角像素点c1。在将比对点数量赋予对应正方形比对区域c的左上角像素点c1的替代实施例中,也可将比对点数量赋予对应正方形比对区域c的其他像素点,例如中心像素点、左下脚像素点、或对应正方形比对区域c中的其他像素点。
[0077]
在其中一实施方式中,第二图像金字塔的第n层图像的边缘概率位置掩模图像bn1的像素大小为t
×
y,其中t为第二图像金字塔的第n层图像的边缘概率位置掩模图像bn1的宽度,y为第二图像金字塔的第n层图像的边缘概率位置掩模图像bn的高度。第一图像金字塔的第n层图像的像素大小为q
×
k,其中,q为第一图像金字塔的第n层图像的宽度,k为第一图像金字塔的第n层图像的高度。如此正方形比对区域c的大小可以为h
×
h,h为正方形比对区域c的边长,h可以为正整数,且满足以下公式(3):
[0078][0079]
其中,min(t,y)为t和y中的最小值,为不小于的最小整数,本实施例中以为例进行说明,当然在其他实施例中h也可以取满足上述公式(3)的其他数值。那么在第二图像金字塔的边缘概率位置掩模图像bn1中总共具有的正方形比对区域c的个数z可以满足以下公式(4):
[0080]
z=(t-h 1)
×
(y-h 1)
····················· (4)
[0081]
在本实施例中,对第二图像金字塔的第n层图像的边缘概率位置掩模图像bn1中的各正方形比对区域c进行遍历,计算各正方形比对区域c内包含的用于描述边缘点的概率位置的像素点的数量,是以逐个像素点移动依次进行的。
[0082]
步骤s1514:获取第二图像金字塔的第n层图像的边缘概率位置掩模图像中比对点数量大于第一图像金字塔的第n层图像的边缘点的数量的像素点作为第一图像金字塔的第n层图像在第二图像金字塔的第n层图像的边缘概率位置掩模图像中的匹配位置。
[0083]
以图6-图9为例,进行说明,在上述步骤s1513中,对第二图像金字塔的第n层图像的边缘概率位置掩模图像bn1中的各正方形比对区域c进行遍历,计算各正方形比对区域c内包含的用于描述边缘点的概率位置的像素点的数量时,正方形比对区域c内包含的第二图像金字塔的第n层图像的边缘概率位置掩膜图像bn1中用于描述边缘点的概率位置的像素点的数量可能会出现以下两种结果:第一种结果是如图7和图8对比图6所示,正方形比对区域c内包含的第二图像金字塔的第n层图像的边缘概率位置掩膜图像bn1中用于描述边缘点的概率位置的像素点的数量大于第一图像金字塔的第n层图像的边缘图像an1中的边缘点的数量;第二种结果是如图9对比图6所示,正方形比对区域c内包含的第二图像金字塔的
第n层图像的边缘概率位置掩膜图像bn1中用于描述边缘点的概率位置的像素点的数量小于或等于第一图像金字塔的第n层图像的边缘图像an1中的边缘点的数量。
[0084]
在上述的两种结果中,出现第一种结果时,如图7和图8对比图6所示,在第二图像金字塔的第n层图像的边缘概率位置掩模图像bn1中,对应正方形比对区域c内的像素点c1可为第一图像金字塔的第n层图像在第二图像金字塔的第n层图像的边缘概率位置掩模图像bn1中的匹配位置。
[0085]
在其他实施例中,正方形比对区域c内包含的第二图像金字塔的第n层图像的边缘概率位置掩膜图像bn1中用于描述边缘点的概率位置的像素点的数量大于第一图像金字塔的第n层图像的边缘点的数量可以是:正方形比对区域c内包含的第二图像金字塔的第n层图像的边缘概率位置掩膜图像bn1中用于描述边缘点的概率位置的像素点的数量大于第一图像金字塔的第n层图像的边缘点的数量与第n层图像的混淆阈值之间的乘积。
[0086]
第n层图像的混淆阈值大于0且小于或等于1。第n层图像的混淆阈值的大小可以针对在正方形比对区域c内包含的第二图像金字塔的第n层图像的边缘概率位置掩膜图像bn1中用于描述边缘点的概率位置的像素点的数量的计算精度以及第一图像金字塔的第n层图像的边缘点的数量的计算精度进行调整。当在正方形比对区域c内包含的第二图像金字塔的第n层图像的边缘概率位置掩膜图像bn1中用于描述边缘点的概率位置的像素点的数量的计算精度大和/或第一图像金字塔的第n层图像的边缘点的数量的计算精度大时,第n层图像的混淆阈值可以设置得大一点,当在正方形比对区域c内包含的第二图像金字塔的第n层图像的边缘概率位置掩膜图像bn1中用于描述边缘点的概率位置的像素点的数量的计算精度小和/或第一图像金字塔的第n层图像的边缘点的数量的计算精度小时,第n层图像的混淆阈值可以设置得小一点。
[0087]
当然在本实施例中第n层图像混淆阈值可以在数值上等于第n层图像的预设得分阀值。这样可以防止遗漏概率匹配位置,能够比较全面的获取到符合预设得分阀值要求的所有概率匹配位置。在本实施方式中,第n层图像的混淆阈值和第n层图像的预设得分阀值可以为0.75。
[0088]
步骤s152:基于获取的第二图像金字塔的第n层图像的全部概率匹配位置,生成用于描述第二图像金字塔的第n层图像的全部概率匹配位置的第二图像金字塔的第n层图像的概率匹配位置掩模图像。
[0089]
以图10为例进行说明,图10是本技术的形状匹配方法实施例的步骤s152中得到的第二图像金字塔的第n层图像的概率匹配位置掩膜图像的示意图。
[0090]
具体地,在第二图像金字塔的第n层图像的概率匹配位置掩模图像bn2中,用于描述第二图像金字塔的第n层图像中的概率匹配位置的像素点的灰度值为1(白色),除用于描述第二图像金字塔的第n层图像中的概率匹配位置的像素点之外的像素点的灰度值为0(黑色)。从而,在第二图像金字塔的第n层图像的概率匹配位置掩模图像bn2中,全部灰度值为1的像素点即描述了第二图像金字塔的第n层图像的全部概率匹配位置。
[0091]
步骤s160:以第二图像金字塔的第n层图像的概率匹配位置掩模图像描述的全部概率匹配位置所在区域作为第二图像金字塔的第n层图像的目标匹配区域,计算第一图像金字塔的第n层图像在第二图像金字塔的第n层图像的目标匹配区域中的相关性得分作为第n层图像匹配得分,将第n层图像匹配得分中大于预设得分阀值的相关性得分所对应的像
素点作为第n层图像匹配结果。
[0092]
本步骤中,以图10-图11为例进行说明,图11是本技术的形状匹配方法实施例的第二图像金字塔的第n层图像中的目标匹配区域的示意图。
[0093]
对比图10与图11,第二图像金字塔的第n层图像bn中d所标记的虚线区域即为第二图像金字塔的第n层图像bn中的目标匹配区域。
[0094]
在本步骤中,可以基于第二图像金字塔的第n层图像的概率匹配位置掩模图像bn2的作用在第二图像金字塔的第n层图像bn中限定出第二图像金字塔的第n层图像bn中的全部概率匹配位置所在区域d作为第二图像金字塔的第n层图像bn的目标匹配区域d。
[0095]
步骤s170:根据第i层图像的匹配结果映射得到第二图像金字塔的第i-1层图像的目标匹配区域,计算第一图像金字塔的第i-1层图像在第二图像金字塔的第i-1层图像的目标匹配区域中的相关性得分作为第i-1层图像匹配得分,将第i-1层图像匹配得分中大于预设得分阀值的相关性得分所对应的像素点作为第i-1层图像匹配结果;其中,3≤i≤n且i为整数;
[0096]
步骤s180:根据第2层图像的匹配结果映射得到待匹配区域图像的目标匹配区域,计算模板图像在待匹配区域图像的目标匹配区域中的相关性得分作为第1层图像匹配得分,将第1层图像匹配得分中最大相关性得分所对应的像素点作为待匹配区域图像与模板图像的匹配结果输出。
[0097]
上述实施例的有益效果:本技术的上述实施例中,通过确定第二图像金字塔的第n层图像的边缘概率位置掩模图像,根据第一图像金字塔的第n层图像的边缘点的数量及分布范围信息、以及第二图像金字塔的第n层图像的边缘概率位置掩模图像,确定第二图像金字塔的第n层图像的概率匹配位置掩模图像;以第二图像金字塔的第n层图像的概率匹配位置掩模图像描述的全部概率匹配位置所在区域作为第二图像金字塔的第n层图像的目标匹配区域,继而根据目标匹配区域完成后续的匹配运算,相对于在整个第二图像金字塔的第n层图像进行遍历搜索,本技术减少计算量,从而加快了匹配速度。
[0098]
进一步地,在计算第一图像金字塔的第n层图像在第二图像金字塔的第n层图像的目标匹配区域中的相关性得分作为第n层图像匹配得分的步骤之前,包括步骤s11至步骤s12;
[0099]
步骤s11:提取第一图像金字塔的第n层图像中的各边缘点,计算第一图像金字塔的第n层图像中的全部边缘点的x方向梯度和y方向梯度。
[0100]
在本实施例中可以通过canny算子对第一图像金字塔的第n层图像进行边缘检测,获取第一图像金字塔的第n层图像的全部边缘点,并记录第一图像金字塔的第n层图像的边缘点的个数,可以通过sobel算子计算第一图像金字塔的第n层图像中的全部边缘点的x方向梯度和y方向梯度。
[0101]
以图5-图6为例进行说明,通过canny算子获取到的第一图像金字塔的第n层图像an的全部边缘点可以以第一图像金字塔的第n层图像an的边缘图像an1的形式存在。
[0102]
步骤s12:根据预设对比度以及第二图像金字塔的第n层图像中各像素点的梯度幅值对第二图像金字塔的第n层图像中的全部像素点的x方向梯度及y方向梯度进行噪声过滤及归一化处理,以及对第一图像金字塔的第n层图像中的全部边缘点的x方向梯度和y方向梯度进行归一化处理。
[0103]
进一步地,计算第一图像金字塔的第n层图像在第二图像金字塔的第n层图像的目标匹配区域中的相关性得分作为第n层图像匹配得分的步骤,包括步骤s13。
[0104]
步骤s13:基于第一图像金字塔的第n层图像中的全部边缘点的归一化处理后的x方向梯度和y方向梯度、以及第二图像金字塔的第n层图像中的全部像素点的噪声过滤及归一化处理后的x方向梯度和y方向梯度,计算第一图像金字塔的第n层图像在第二图像金字塔的第n层图像的目标匹配区域中的相关性得分作为第n层图像匹配得分。
[0105]
进一步地,在计算第一图像金字塔的第m层图像在第二图像金字塔的第m层图像的目标匹配区域中的相关性得分作为第m层图像匹配得分的步骤之前,包括步骤s21至步骤s24。其中,1≤m≤n-1且m为整数,
[0106]
步骤s21:提取第一图像金字塔的第m层图像中的各边缘点,计算第一图像金字塔的第m层图像中的全部边缘点的x方向梯度和y方向梯度。
[0107]
步骤s22:获取第二图像金字塔的第m层图像中的全部像素点的x方向梯度及y方向梯度。
[0108]
步骤s23:根据第二图像金字塔的第m层图像中全部像素点的x方向梯度及y方向梯度计算第二图像金字塔的第m层图像中的各像素点的梯度幅值。
[0109]
步骤s24:根据预设对比度以及第二图像金字塔的第m层图像中各像素点的梯度幅值对第二图像金字塔的第m层图像中的全部像素点的x方向梯度及y方向梯度进行噪声过滤及归一化处理,以及对第一图像金字塔的第m层图像中的全部边缘点的x方向梯度和y方向梯度进行归一化处理。
[0110]
进一步地,计算第一图像金字塔的第m层图像在第二图像金字塔的第m层图像的目标匹配区域中的相关性得分作为第m层图像匹配得分的步骤,包括步骤s25。
[0111]
步骤s25:基于第一图像金字塔的第m层图像中的全部边缘点的归一化处理后的x方向梯度和y方向梯度、以及第二图像金字塔的第m层图像中的全部像素点的噪声过滤及归一化处理后的x方向梯度和y方向梯度,计算第一图像金字塔的第m层图像在第二图像金字塔的第m层图像的目标匹配区域中的相关性得分作为第m层图像匹配得分。
[0112]
本实施例的有益效果:由于一像素点对应的梯度幅值越小,该像素点就越不可能是边缘点,而越有可能是噪声点,一像素点的梯度幅值越大,该像素点就越有可能是边缘点,而越不可能是噪声点。所以在本实施例中通过根据预设对比度以及第二图像金字塔的第m层图像中各像素点的梯度幅值对第二图像金字塔的第m层图像中的全部像素点的x方向梯度及y方向梯度进行噪声过滤及归一化处理的步骤,以将噪声点的梯度清零,从而能够有效地排除噪声点对后面相关性得分的计算的干扰且能够加快匹配速度。
[0113]
进一步地,在上述实施例中,第一图像金字塔的第q层图像中的全部边缘点的归一化处理后的x方向梯度满足以下公式(5):
[0114][0115]
其中,(xq,yq)为第一图像金字塔的第q层图像中的边缘点的坐标,为第一图像金字塔的第q层图像中的全部边缘点的归一化处理后的x方向梯度中对应第一图像
金字塔的第q层图像中的坐标为(xq,yq)的边缘点的x方向梯度;为第一图像金字塔的第q层图像中的全部边缘点的归一化处理前的x方向梯度中对应第一图像金字塔的第q层图像中的坐标为(xq,yq)的边缘点的x方向梯度,为第一图像金字塔的第q层图像中的全部边缘点的归一化处理前的y方向梯度中对应第一图像金字塔的第q层图像中的坐标为(xq,yq)的边缘点的y方向梯度。
[0116]
第一图像金字塔的第q层图像中的全部边缘点的归一化处理后的y方向梯度满足以下公式(6):
[0117][0118]
其中,(xq,yq)为第一图像金字塔的第q层图像中的任意一边缘点的坐标,为第一图像金字塔的第q层图像中的全部边缘点的归一化处理后的y方向梯度中对应第一图像金字塔的第q层图像中的坐标为(xq,yq)的边缘点的y方向梯度;为第一图像金字塔的第q层图像中的全部边缘点的归一化处理前的x方向梯度中对应第一图像金字塔的第q层图像中的坐标为(xq,yq)的边缘点的x方向梯度,为第一图像金字塔的第q层图像中的全部边缘点的归一化处理前的y方向梯度中对应第一图像金字塔的第q层图像中的坐标为(xq,yq)的边缘点的y方向梯度。
[0119]
进一步地,根据预设对比度以及第二图像金字塔的第q层图像中的各像素点的梯度幅值对第二图像金字塔的第q层图像中的全部像素点的x方向梯度及y方向梯度进行噪声过滤及归一化处理的步骤,包括步骤s31。
[0120]
步骤s31:对第二图像金字塔的第q层图像中的全部像素点的x方向梯度及y方向梯度进行噪声过滤及归一化处理,第二图像金字塔的第q层图像中的全部像素点的噪声过滤及归一化处理后的x方向梯度满足以下公式(7):
[0121][0122]
其中,(μq,νq)为第二图像金字塔的第q层图像中的任意一像素点的坐标,为第二图像金字塔的第q层图像中的全部像素点的经噪声过滤及归一化处理后的x方向梯度中对应于坐标为(μq,νq)的像素点的x方向梯度,为第二图像金字塔的第q层图像中的全部像素点的经噪声过滤及归一化处理前的x方向梯度中对应于坐标为(μq,νq)的像素点的x方向梯度,为第二图像金字塔的第q层图像中的全部像素点的经噪声过滤及归一化处理前的y方向梯度中对应于坐标为(μq,νq)的像素点的y方向梯度,
|gf(μq,νq)|为第二图像金字塔的第q层图像中的坐标为(μq,νq)的像素点的梯度幅值,c
min
为所述预设对比度。
[0123]
第二图像金字塔的第q层图像中的全部像素点的噪声过滤及归一化处理后的y方向梯度满足以下公式(8):
[0124][0125]
其中,(μq,νq)为第二图像金字塔的第q层图像中的任意一像素点的坐标,为第二图像金字塔的第q层图像中的全部像素点的经噪声过滤及归一化处理后的y方向梯度中对应于坐标为(μq,νq)的像素点的y方向梯度,为第二图像金字塔的第q层图像中的全部像素点的经噪声过滤及归一化处理前的x方向梯度中对应于坐标为(μq,νq)的像素点的x方向梯度,为第二图像金字塔的第q层图像中的全部像素点的经噪声过滤及归一化处理前的y方向梯度中对应于坐标为(μq,νq)的像素点的y方向梯度,|gf(μq,νq)|为第二图像金字塔的第q层图像中的坐标为(μq,νq)的像素点的梯度幅值,c
min
为所述预设对比度。。
[0126]
进一步地,基于第一图像金字塔的第q层图像中的全部边缘点的归一化处理后的x方向梯度和y方向梯度、以及第二图像金字塔的第q层图像中的全部像素点的噪声过滤及归一化处理后的x方向梯度和y方向梯度,计算第一图像金字塔的第q层图像在第二图像金字塔的第q层图像的目标匹配区域中的相关性得分作为第q层图像匹配得分的步骤,包括步骤s32。
[0127]
步骤s32:计算第一图像金字塔的第q层图像在第二图像金字塔的第q层图像的目标匹配区域中的相关性得分作为第q层图像匹配得分,第一图像金字塔的第q层图像在第二图像金字塔的第q层图像的目标匹配区域中的相关性得分满足以下公式(9):
[0128][0129]
其中,(wq,sq)为第二图像金字塔的第q层图像的目标匹配区域中任意一像素点的坐标,γ(wq,sq)为第一图像金字塔的第q层图像在第二图像金字塔的第q层图像的目标匹配区域中的相关性得分中对应于坐标为(wq,sq)的像素点上的相关性得分,eq为第一图像金字塔的第q层图像中的边缘点的集合,(xq,yq)为集合eq中一个边缘点的坐标,为第二图像金字塔的第q层图像中的全部像素点的经噪声过滤及归一化处理后的x方向梯度中对应于坐标为(wq xq,sq yq)的像素点的x方向梯度,为第一
图像金字塔的第q层图像中的全部边缘点的经归一化处理后的x方向梯度中对应于坐标为(xq,yq)的边缘点的x方向梯度,为第二图像金字塔的第q层图像中的全部像素点的经噪声过滤及归一化处理后的y方向梯度中对应于坐标为(wq xq,sq yq)的像素点的y方向梯度,为第一图像金字塔的第q层图像中的全部边缘点的经归一化处理后的y方向梯度中对应于坐标为(xq,yq)的边缘点的y方向梯度,|eq|为第一图像金字塔的第q层图像中的边缘点的集合中边缘点的数量。
[0130]
本实施例的有益效果:由于一像素点对应的梯度幅值越小,该像素点就越不可能是边缘点,而越有可能是噪声点,一像素点的梯度幅值越大,该像素点就越有可能是边缘点,而越不可能是噪声点。所以在本实施例中通过根据预设对比度以及第二图像金字塔的第q层图像中各像素点的梯度幅值对第二图像金字塔的第q层图像中的全部像素点的x方向梯度及y方向梯度进行噪声过滤及归一化处理,1≤q≤n且q为整数,的步骤,以将噪声点的梯度清零,从而能够有效地排除噪声点对后面相关性得分的计算的干扰且能够加快匹配速度。
[0131]
参阅图12,图12是本技术的形状匹配装置的结构示意图。
[0132]
如图12所示,形状匹配装置20包括图像金字塔生成模块21、掩模图像生成模块22以及匹配模块23。
[0133]
图像金字塔生成模块21,用于对模板图像进行n-1次向下采样,得到包含n层图像的第一图像金字塔,以及对待匹配区域图像进行n-1次向下采样,得到包含n层图像的第二图像金字塔,第一图像金字塔的第1层图像为模板图像,第二图像金字塔的第1层图像为待匹配区域图像,n为大于或等于2的整数。
[0134]
掩模图像生成模块22,用于获取第二图像金字塔的第n层图像中的全部像素点的x方向梯度及y方向梯度、以及预设对比度。
[0135]
掩模图像生成模块22,还用于根据第二图像金字塔的第n层图像中全部像素点的x方向梯度及y方向梯度计算第二图像金字塔的第n层图像中的各像素点的梯度幅值。
[0136]
掩模图像生成模块22,还用于根据预设对比度、以及第二图像金字塔的第n层图像中的各像素点的梯度幅值,确定用于描述第二图像金字塔的第n层图像中的边缘点的全部概率位置的掩模图像作为第二图像金字塔的第n层图像的边缘概率位置掩模图像。
[0137]
掩模图像生成模块22,还用于根据第一图像金字塔的第n层图像的边缘点的数量及分布范围信息、以及第二图像金字塔的第n层图像的边缘概率位置掩模图像,确定用于描述第二图像金字塔的第n层图像中的全部概率匹配位置的掩模图像作为第二图像金字塔的第n层图像的概率匹配位置掩模图像。
[0138]
匹配模块23,用于以第二图像金字塔的第n层图像的概率匹配位置掩模图像描述的全部概率匹配位置所在区域作为第二图像金字塔的第n层图像的目标匹配区域,计算第一图像金字塔的第n层图像在第二图像金字塔的第n层图像的目标匹配区域中的相关性得分作为第n层图像匹配得分,将第n层图像匹配得分中大于预设得分阀值的相关性得分所对应的像素点作为第n层图像匹配结果。
[0139]
匹配模块23,还用于根据第i层图像的匹配结果映射得到第二图像金字塔的第i-1层图像的目标匹配区域,计算第一图像金字塔的第i-1层图像在第二图像金字塔的第i-1层
图像的目标匹配区域中的相关性得分作为第i-1层图像匹配得分,将第i-1层图像匹配得分中大于预设得分阀值的相关性得分所对应的像素点作为第i-1层图像匹配结果;其中,3≤i≤n且i为整数。
[0140]
匹配模块23,还用于根据第2层图像的匹配结果映射得到待匹配区域图像的目标匹配区域,计算模板图像在待匹配区域图像的目标匹配区域的中相关性得分作为第1层图像匹配得分,将第1层图像匹配得分中最大相关性得分所对应的像素点作为待匹配区域图像与模板图像的匹配结果输出。
[0141]
进一步地,匹配模块23,还用于在计算第一图像金字塔的第n层图像在第二图像金字塔的第n层图像的目标匹配区域中的相关性得分作为第n层图像匹配得分的步骤之前,执行上述实施例的步骤s11至s12。
[0142]
所示匹配模块23计算第一图像金字塔的第层图像在第二图像金字塔的第n层图像的目标匹配区域中的相关性得分作为第n层图像匹配得分的步骤,可以包括上述实施例的步骤s13。
[0143]
匹配模块23计算第一图像金字塔的第m层图像在第二图像金字塔的第m层图像的目标匹配区域中的相关性得分作为第m层图像匹配得分的步骤之前,可以包括上述实施例的步骤s21至步骤s24。其中,1≤m≤n-1且m为整数。
[0144]
匹配模块23计算第一图像金字塔的第m层图像在第二图像金字塔的第m层图像的目标匹配区域中的相关性得分作为第m层图像匹配得分的步骤,包括上述实施例的步骤s25。
[0145]
上述实施例的有益效果:本技术的上述实施例中,通过确定第二图像金字塔的第n层图像的边缘概率位置掩模图像,根据第一图像金字塔的第n层图像的边缘点的数量及分布范围信息、以及第二图像金字塔的第n层图像的边缘概率位置掩模图像,确定第二图像金字塔的第n层图像的概率匹配位置掩模图像;以第二图像金字塔的第n层图像的概率匹配位置掩模图像描述的全部概率匹配位置所在区域作为第二图像金字塔的第n层图像的目标匹配区域,继而根据目标匹配区域完成后续的匹配运算,相对于在整个第二图像金字塔的第n层图像进行遍历搜索,本技术减少计算量,从而加快了匹配速度;此外,由于一像素点对应的梯度幅值越小,该像素点就越不可能是边缘点,而越有可能是噪声点,一像素点的梯度幅值越大,该像素点就越有可能是边缘点,而越不可能是噪声点。所以在本实施例中通过根据预设对比度以及第二图像金字塔的第q层图像中各像素点的梯度幅值对第二图像金字塔的第q层图像中的全部像素点的x方向梯度及y方向梯度进行噪声过滤及归一化处理的步骤,以将噪声点的梯度清零,从而能够有效地排除噪声点对后面相关性得分的计算的干扰且能够加快匹配速度。其中,1≤q≤n且q为整数。
[0146]
参阅图13,图13是本技术的计算机设备实施例的结构示意图。
[0147]
如图13所示,计算机设备2可以包括存储器210和处理器220。处理器220电性耦接存储器210。存储器210用于存储程序数据。该程序数据能由处理器220加载并执行,从而实现本技术的上述实施例的形状匹配方法。
[0148]
参阅图14,图14是本技术的存储装置实施例的结构示意图。
[0149]
如图14所示,存储装置3可包括至少一个存储块31,程序数据分别存储在至少一个存储块31中,或存储在部分存储块31中。程序数据能够被处理器执行,以实现上述实施例的
形状匹配方法。
[0150]
本实施例中的存储装置3可以为如图13中计算机设备2的存储器210。在其他实施方式中,也可以为具有存储功能的u盘、网盘、存储硬盘等计算机可读存储介质,此外,还可以为具有存储功能的终端、服务器等装置。
[0151]
以上仅为本技术的实施方式,并非因此限制本技术的专利范围,凡是利用本技术说明书及附图内容所作的等效结构或等效流程变换,或直接或间接运用在其他相关的技术领域,均同理包括在本技术的专利保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。