1.本发明涉及拆卸线平衡技术领域,具体涉及一种不合并优先关系矩阵的并行拆卸线设置 方法。
背景技术:
2.目前,拆卸线布局形式主要分为直线型、u型、双边和并行。并行拆卸线是拆卸线布局 形式的一种,并行布局形式是由两条拆卸线和一列工作站组成,工作站位于两条拆卸线中间, 同时负责两条拆卸线上的寿终产品拆卸。并行拆卸线布局形式可以有效减少工作站空闲时间, 提高拆卸效率。
3.目前,拆卸线平衡问题的求解方法主要包括启发式算法、智能优化算法和精确求解。启 发式算法需要根据实际求解问题的优化目标设计合理的启发式规则,虽然启发式算法求解得 到较优解的速度较快,但是对于大规模问题的求解质量很难令人满意,同时,启发式算法一 般仅能获得较优解。
技术实现要素:
4.鉴于此,本发明目的在于提供一种不合并优先关系矩阵的拆线线设置方法,其能够应用 于大规模的并行拆卸线平衡问题。
5.本发明提供的技术方案是,一种不合并优先关系矩阵的并行拆卸线设置方法,包括以下 步骤:
6.s1、收集待拆卸物的信息,将待拆卸物的零部件作为拆卸任务并编号,并将可回收零部 件以及具有危害属性的零部件作为优先拆卸任务;
7.s2、构造混合整数线性规划模型,所述模型由目标函数和约束条件组成,所述目标函数 为工作站数量、总空闲时间、需求指标和危害指标中的一种或多种,所述约束条件为:
8.完全拆卸约束:式中,x
ilk
为任务分配变量,若拆卸线l 的第i个任务分配到第k个工作站,则x
ilk
=1,否则x
ilk
=0;i为拆卸任务编号集合, i={1,2,...,n};i为拆卸任务编号;l为拆卸线编号;
9.工作站开启数量约束:式中,ti为第i个拆卸任务的拆卸时 间;ct为节拍时间;sk为工作站开启变量,若第k个工作站开启则sk=1,否则,sk=0;
10.拆卸任务开始时间约束:式中,为拆卸顺序变量,若拆卸线u上的任务j和拆卸线l上的i同时分配到组合工作站k 中,且任务j分配到任务i之
前则否则w
il
为拆卸线l上的拆卸任务i开始拆 卸的时间;l和u均为拆卸线编号;
11.节拍时间约束:
12.拆卸顺序约束:拆卸顺序约束:式中,m为工作站编号集合, m={1,2,...m};
13.拆卸开始时间约束:
14.拆卸任务优先关系约束:式中,a为优先 关系矩阵,若a
ij
=1,则表示拆卸任务i是拆卸任务j的紧前任务,若a
ij
=0,则表示拆卸任务i不是拆卸任务j的紧前任务;
15.工作站开启条件约束:式中,n为总 拆卸任务量;
16.工作站顺序开启约束:sk≤s
k-1
,k∈{2,...,m};
17.不同拆卸线上相同任务编号约束:w
j2
≥w
i1
ti,i,j∈{i≤j|i};
18.同一拆卸线上相同任务编号约束:
19.s3、对s2中的混合整数线性规划模型进行求解,即可得到多个目标最优解。
20.本发明起到的技术效果是:
21.1、区别于传统并行拆卸线处理模式,根据并行拆卸线上的拆卸产品的优先关系矩阵分别 分配其拆卸任务,并对并行拆卸线平衡问题进行求解,同时其能够应用于大规模的并行拆卸 线平衡问题,在实际使用过程中的应用范围更广。
22.2、建立了不合并并行拆卸线优先关系矩阵的混合整数线性规划模型,分别求解并行拆卸 线开启工作站数量、总空闲时间、需求属性和危害属性四个目标的单目标最优值,使生产者 有更好的选择范围。
具体实施方式
23.下面结合实施例,对本发明作进一步地的详细说明。
24.为使本发明实施方式的目的、技术方案和优点更加清楚,下面将结合本发明实施方式, 对本发明的技术方案进行清楚、完整地描述,显然,所描述的实施方式是本发明一部分实施 方式,而不是全部的实施方式。基于本发明中的实施方式,本领域普通技术人员在没有作出 创造性劳动前提下所获得的所有其他实施方式,都属于本发明保护的范围。因此,以下对本 发明的实施方式的详细描述并非旨在限制要求保护的本发明的范围,而是仅
仅表示本发明的 选定实施方式。
25.实施例:
26.一种不合并优先关系矩阵的并行拆卸线设置方法,包括以下步骤:
27.s1、收集待拆卸物的信息,将待拆卸物的零部件作为拆卸任务并编号,并将可回收零部 件以及具有危害属性的零部件作为优先拆卸任务;
28.具体的,由于本发明的方法,能够同时对多个相同的待拆卸物进行拆卸,因此,需要对 待拆卸物内的零部件进行统计并分别编号,对一个待拆卸物,以集合i作为该待拆卸物中各 零部件的编号的集合,其中i={1,2,...,n},n为该待拆卸物中各零部件的数量上限。
29.对于较多的待拆卸物,其内部还存在较多具有一定回收利用价值的零部件,在对这些待 拆卸物进行拆卸时,应当先将这些具有回收利用价值的零部件拆卸下来,避免在长时间的拆 卸过程中损坏,影响回收利用价值。
30.在一些待拆卸物中,部分零部件容易对拆卸人员、环境等造成危害,具有潜在的危害属 性,为了避免在拆卸过程中对拆卸人员或环境造成影响,我们需要尽早的将这些具有危害属 性的零部件进行拆卸。
31.在待拆卸物中,部分零部件的拆卸,需要在某一个零部件完成拆卸后,其才能进行拆卸, 即两个零部件之间可能存在紧前任务、紧后任务的关系,因此,也需要对存在紧前任务、紧 后任务关系的零部件进行记录。
32.综上,在该步骤中,需要对待拆卸物的各个需要拆卸的零部件作为拆卸任务,并对每一 个拆卸任务进行编号,同时通过构造优先关系矩阵的方式,对两个零部件是否为紧前任务、 紧后任务进行记录。对优先关系矩阵做如下定义:对于n
×
n的矩阵p1,其中一个元素p
ij
=1 (1≤i≤n,1≤j≤n,且i≠j)时,表明拆卸任务i是拆卸任务j的紧前任务,当p
ij
=0时,表 明拆卸任务i不是拆卸任务j的紧前任务。
33.s2、构造混合整数线性规划模型,所述模型由目标函数和约束条件组成,所述目标函数 为工作站数量、总空闲时间、需求指标和危害指标中的一种或多种,所述约束条件为:
34.完全拆卸约束:式中,x
ilk
为任务分配变量,若拆卸线l的第 i个任务分配到第k个工作站,则x
ilk
=1,否则x
ilk
=0;i为拆卸任务编号集合,i={1,2,...,n}; i为拆卸任务编号;l为拆卸线编号。
35.工作站开启数量约束:式中,ti为第i个拆卸任务的拆卸时 间;ct为节拍时间;sk为工作站开启变量,若第k个工作站开启则sk=1,否则,sk=0;
36.拆卸任务开始时间约束:式中, 为拆卸顺序变量,若拆卸线u上的任务j和拆卸线l上的i同时分配到组合工作站k中, 且任务j分配到任务i之前则否则w
il
为拆卸线l上的拆卸任务i开始拆卸的 时间;l和u均为拆卸线编号;
37.节拍时间约束:该约束条件保证各工作站的总拆 卸时间不能够大于节拍时间。
38.拆卸顺序约束:拆卸顺序约束:式中,m为工作站编号集合, m={1,2,...m};
39.拆卸开始时间约束:
40.拆卸任务优先关系约束:式中,a为优先 关系矩阵,若a
ij
=1,则表示拆卸任务i是拆卸任务j的紧前任务;
41.工作站开启条件约束:式中,n为总 拆卸任务量;
42.不同拆卸线上相同任务编号约束:w
j2
≥w
i1
ti,i,j∈{i≤j|i};
43.同一拆卸线上相同任务编号约束:
44.同时,建立的目标函数如下:
45.工作站数量:
46.总空闲时间:
47.需求指标:
48.危害指标:
49.式中,di表示拆卸任务的需求属性,di越大,其需求程度越高,需要优先拆卸;
50.hi表示拆卸任务的危害属性,hi越大,其危害程度越大,需要优先拆卸。
51.上述的约束条件和目标函数构成了本发明的混合整数线性规划模型,可直接对该模型进 行精确求解,而不需要采用智能优化算法,同时克服了常规模型采用精确求解时难以对大规 模进行处理的问题。
52.s3、对s2中的混合整数线性规划模型进行求解,即可得到多个目标最优解。在本步骤中, 可根据需要分别对每一个目标函数进行求解,比如优先考虑的是对可回收零件的重复利用时, 可对需求指标进行求解,使得整个模型更加灵活。
53.对于本步骤而言,可直接采用现有的求解器进行求解,如gurobi优化求解器等。
54.下面采用具体的例子进一步对本发明的优势进行说明。
55.实施例1
56.为了突出本实施例在小规模的并行拆卸线平衡问题、大规模的并行拆卸线平衡问题均具 有良好的效果,进行了以下仿真实验:
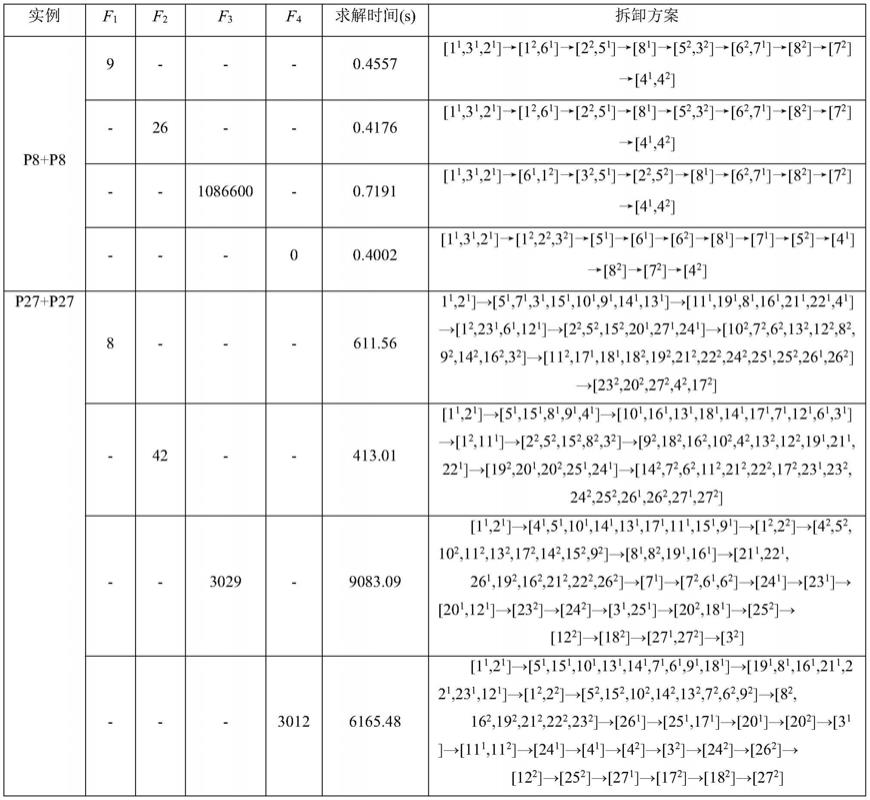
57.基于文献《atabu search algorithm forbalancing a sequence-dependent disassembly line》中 的数据,给出了p8 p8的同类寿终产品的并行拆卸仿真结果;基于文献《部分破坏性拆卸线 平衡问题建模与优化》中的数据,给出了p27 p27的同类寿终产品的并行拆卸仿真结果。最 终的仿真结果如表1所示。
58.待拆卸物中各零部件包括危害属性、需求属性、优先拆卸关系等均来源于上述文献,表 1中,上标表示拆卸线序号,即上标1表示第一条拆卸线,上标2表示第二条拆卸线。
59.表1求解同类寿终产品的求解结果
[0060][0061]
拆卸实例p8 p8和p27 p27的单目标求解结果以在表中给出,p8 p8为中规模算例,在 现有技术中能够对其进行有效求解,但p27 p27为大规模算例,在现有技术中未有精确模型 对大规模算例进行求解,本发明对p27 p27的大规模实例进行了求解,并在一定时间范围内 获得单目标最优解,各单目标最优解的拆卸方案也在求解结果中给出。
[0062]
以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何 熟悉本技术领域的技术人员在本发明实施例揭露的技术范围内,可轻易想到的变化或替换, 都应涵盖在本发明的保护范围之内。因此,本发明的保护范围应该以权利要求的
保护范围为 准。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。