1.本发明属于融合图与数控工艺解析的加工特征识别方法,涉及一种回转类零件特征识别方法。
背景技术:
2.文献“复杂回转类零件自动特征识别算法研究,华中科技大学,2019”公开了一种基于图和规则的回转类零件识别方法。该方法首先利用图结构对零件进行表示,而后采用基于边界分割面的特征分解方法将零件分解为多个加工特征区域;最后,采用基于规则定义加工特征的特征图匹配机制将提取到的加工特征区域与预先创建完成的特征知识库中的模板进行匹配以完成对零件的特征识别。文献所述方法可以对部分回转类零件进行有效地特征识别,但是仍然难以处理具有复杂相交特征的零件。此外,文献所述方法在进行特征模板匹配的过程中,待匹配特征只能与特征库中拓扑结构完全相同的模板完成匹配,而这种匹配方法具有较差的柔性。
技术实现要素:
3.要解决的技术问题
4.为了避免现有技术的不足之处,本发明提出一种回转类零件特征识别方法
5.技术方案
6.一种回转类零件特征识别方法,其特征在于步骤如下:
7.步骤1、回转类零件设计模型预分割:利用面属性邻接图对回转类零件进行描述,而后采用凸边分解方法将面属性邻接图分割为多个加工区域图;每个加工区域图是一个凹子图,其中凹子图中任意2个顶点之间均存在一条凹路径,凹路径中所有边均为非凸边;
8.所述面属性邻接图中每个节点表示零件的一个面,连接节点的边表示零件中相邻面之间的相交边,
9.所述的面包含三种属性:面的类型、面的凸凹性和面的内外性;
10.所述面的类型包括但不限于平面、柱面或锥面;
11.所述面的凸凹性包括凹面、凸面或平面;
12.所述面的的内外性包括外型面、内型面或平面;
13.所述相交边有两种属性:边的凸凹性和边的类型;
14.所述边的凸凹性为凸边、凹边、凹切边或凸切边;
15.所述边的类型包括但不限于直线边、圆弧边或椭圆边;
16.所述非凸边包括但不限于凹边或凹切边;
17.步骤2:判断加工区域图表示孤立特征还是相交区域,若加工区域图表示孤立特征,则进入步骤4直接进行特征模板匹配;若加工区域图表示相交区域,则进入步骤3进行特征分割;
18.所述孤立特征的定义为:在一个加工区域图g=(v,e)中,若边集e中的所有边均为
非凸边,则认为该加工区域图对应于零件中的加工区域表示一个孤立特征;
19.所述相交区域的定义为:对于加工区域图g=(v,e),若边集e中存在凸边或者凸切边,则认为该加工区域图对应于零件中的加工区域为相交区域;
20.步骤3、相交区域特征分割:基于数控工艺解析的方法确定相交区域中的基面与非基面,并识别基面的类型;而后,根据基面的类型构造基面集;最后,基面集通过一定规则与非基面进行组合得到若干个加工特征;
21.根据基面的定义找到零件中所有的基面,并通过判断基面是否为一个完整的回转面来判断基面的类型,再采用不同建模软件对零件进行表达;
22.所述基面的定义为:在一个回转类零件中,对于一个不为圆角面的回转面,若其回转轴与零件整体的回转轴共线,则认为该面为一个基面;
23.根据数控工艺的类型,将基面划分为完全可车基面,不可车基面以及部分可车基面三类;
24.完全可车基面:对于一个回转类零件中的面,若该面上的任何一个部位均通过车削工艺进行加工,则将其看作为完全可车基面;
25.不可车基面:对于一个回转类零件中的面,若该面上的所有部位均无法采用车削工艺进行加工,则将其看作为不可车基面;
26.部分可车基面:同时包含了可车部分和不可车部分;
27.对于回转类零件的面,除去被识别为基面bf的面,其余面均为非基面;
28.所述基面集的定义为:满足三个条件的基面所组成的集合为一个基面集,记作bfs,且bfs={bf1,bf2,...,bfn},其中bfi表示基面集中第i个基面,i=1,2,
…
,n:
29.1)集合中的基面同属一种类别;
30.2)集合对应的面邻接属性图g=(v,e)只包含一个联通分量;
31.3)面邻接属性图g的边集e中的所有边均为非凸边;
32.由完全可车基面组成的基面集作为完全可车基面集,并将以完全可车基面集为基础的加工特征看作为可车区域;
33.由不可车基面组成的基面集作为不可车基面集,并将以不可车基面集为基础的加工特征看作为不可车区域;
34.由部分可车基面组成的基面集作为部分可车基面集,并将以部分可车基面集为基础的加工特征看作为部分可车区域;
35.所述判断基面bf的类型是:
36.1)判断基面bf是否为完整的回转面:首先,使用nx12.0中的askfaceuvminmax命令分别计算出基面bf上最大和最小的u、v值并分别记作为u
max
,u
min
,v
max
,v
min
,分别计算u
max
和u
min
的均值u
ave
以及v
max
和v
min
的均值v
ave
;而后分别获取(u
ave
,v
ave
)处沿u方向和v方向的一阶导数;如果沿u方向一阶导数的矢量与基面回转轴垂直,则分别计算(u
max
,v
min
)和(u
max
,v
max
)处点的坐标,若两处点的坐标重合,则说明基面bf为一个完整回转面,否则认为是一个不完整的回转面;如果沿v向一阶导数的矢量与基面回转轴垂直,则分别计算(u
min
,v
min
)和(u
max
,v
min
)处点的坐标,若两处点的坐标重合,则说明基面bf为一个完整回转面,否则认为是一个不完整的回转面;
37.2)如果基面bf是一个完整的回转面,则只需要判断与该基面相邻且相交边为非凸
边的面是否都为基面或者回转轴与零件回转轴共线的圆角面,若是,则说明该基面是完全可车基面,反之,需要继续判断基面的类型;
38.3)如果基面bfi是一个不完整的回转面,则首先判断是否存在一个基面bfj(i≠j)使得其与bfi之间至少存在两条类型为非凸边的相交边;如果不存在,则认为基面bfi为不可车基面;如果存在,则判断bfi与bfj之间的相交边是否均为圆弧线,若不是,则认为bfi与bfj可以组成一个完整的回转面;若是,则需要判断圆弧线的起点和终点到bfi回转轴的距离是否相同;若不同,则认为bfi与bfj可以组成一个完整回转面;若相同,则判断圆弧线的起点和终点之间的连线是否与bfi的回转轴垂直;若不垂直,则认为bfi与bfj组成了一个完整的回转面;若垂直,则认为bfi与bfj无法组成一个完整回转面。通过上述方法判断基面bfi是否可以与其他基面组成一个完整的回转面,如果不可以,则认为基面bfi为不可车基面,反之,需要继续判断基面的类型;
39.4)针对一个完整的回转面,如果该回转面仅由一个基面构成,则首先直接提取该基面所有非凸边并组成一个集合,记concaveedge={e1,e2,...,en},其中ei表示集合中的第i条非凸边,i=1,2,
…
,n;如果该回转面不止由一个基面够成,则首先在删除组成该完整回转面的所有面之间的相交边后,再提取这些基面的所有非凸边并组成集合concaveedge;而后,根据这些非凸边之间的相邻情况获取组成整个回转面的所有环,并构成一个集合,记faceloops={l1,l2,...,ln},其中li表示组成该回转面的第i个环,i=1,2,
…
,n;之后,对每个环中的边进行离散化处理以分别得到每个环对应的点云数据,并记pointsets={ps1,ps2,...,psn},其中元素psi表示环li经过离散化后得到的点集,i=1,2,
…
,n,记psi={p1,p2,...,pm},其中元素pk表示点集psi中的第k个点,k=1,2,
…
,m;然后,分别将psi中的点投影至零件的回转轴v0上,根据这些投影点到回转轴原点originpoint(x0,y0,z0)的距离的最大值和最小值得到psi对应的投影区间ii,记s={i1,i2,...,in},其中ii=[d
min
,d
max
],d
min
=min{d1,d2,...,dm},d
max
=min{d1,d2,...,dm},元素dk表示点集psi中第k个点pk(xk,yk,zk)对应的投影点到originpoint的距离,k=1,2,...,m,dk表达式如下:
[0040][0041]
式中vk表示由点originpoint指向点pk的向量,vk=(x
k-x0,y
k-y0,z
k-z0);
[0042]
最后,判断集合s中的所有区间的长度是否都为0,若是,则认为组成该完整回转面的所有基面均为完全可车基面,反之,采用线性扫描法判断s中所有区间的并集是否为一个连续的区间,若是,则认为组成该完整回转面的所有基面均为不可车基面,若不是,则认为组成该完整回转面的所有基面均是部分可车基面;
[0043]
根据对基面类型的识别结果,构造不同类型的基面集,对基面集构造加工区域:
[0044]
1)针对一个完全可车基面集ctbfs,给定集合找到与ctbfs中基面相邻且相交边为非凸边的所有非基面,并将这些非基面与ctbfs中的面共同加入到tfs中,则集合tfs中的面即可以共同组成一个可车区域;
[0045]
2)针对一个不可车基面集ntbfs,通过以下算法将相交区域中的不可车区域分割出来:
[0046]
step1.输入相交区域中的一个不可车基面集ntbfs,并给定集合
[0047]
step2.寻找与ntbfs中基面相邻且相交边为非凸边的所有非基面,并将这些面组
成的集合记作nfs0。将ntbfs中的面与nfs0中的面都加入到ntfs中;
[0048]
step3.k=0;
[0049]
step4.给定集合将相交区域中满足以下条件的面f加入到ntfs中:1)使得f与nf相邻且二者相交边为非凸边;2)f不是基面;3)与f相邻且相交边为非凸边的面均不是基面;4)若f与ntf相邻,其相交边为非凸边;
[0050]
step5.判断是否存在与f相邻且相交边为凸边的基面,若存在,不进行任何操作,若不存在,则将f加入到nfs
k 1
中;
[0051]
step6.判断nfs
k 1
是否为空集,若是,则输出ntfs,并将该面集合作为一个不可车区域;若不是,令k=k 1,并转step3;
[0052]
3)针对一个部分可车基面集ptbfs,给定集合寻找与ptbfs中基面相邻且相交边为非凸边的所有非基面,把这些非基面与ptbfs中的面共同加入到ptfs中。集合ptfs中的面即可以共同组成一个部分可车区域;
[0053]
若仍然存在未能归类的面——不属于tfs、ntbfs和ptbfs中的任意一个集合,则首先,将这些未能归类的面放入一个集合,并构建其对应的面邻接属性图;而后,将面邻接属性图中每个联通分量对应的面集合作为一个不可车区域;
[0054]
步骤4:使用特征模板库中的模板对从零件中分割出来的孤立特征以及从相交区域中分割出来的加工特征进行匹配以完成特征识别,其中,特征模板库中的模板均使用面属性邻接图进行表示即:获取从零件中分割出来的孤立特征或者从相交区域中分割出来的加工特征属性邻接图g1;而后,获取g1中节点个数记为n1;然后,在特征模板库中找到节点个数在区间[a
·
n1,b
·
n1]中的所有模板,其中a和b均为常数;
[0055]
采用下述方法逐个将这些模板与g1进行匹配以得到二者的相似度:对于区间内的任一模板g2,记其节点个数为n2,比较n1和n2的大小,将节点个数较少的图作为小图,把节点个数较多的图作为大图,并使用vf2算法进行子图同构,如果小的图不是大的图的一个子图,则认为g1和g2相似度为0,反之如果小的图是大的图的一个子图,计算二者的相似度:
[0056][0057]
其中,et
i(1)
和et
i(2)
分别表示待识别特征属性邻接图和模板中第i个节点的度;最后,将与g1相似度最大的模板作为该特征的最终识别结果。
[0058]
所述步骤3的对零件进行表达时,基于数控工艺解析的方法是:catia建模得到的完整环形面是由两个半环形面组合而成。
[0059]
所述步骤3的对零件进行表达时,使用nx建模得到的完整环形面则是直接由一个面构成。
[0060]
所述步骤3的对零件进行表达时,建立在nx12.0二次开发的基础上,在处理使用catia或其他cad软件构建的三维模型时,需要将其转化为stp格式。
[0061]
所述步骤4的常数a=0.8,常数b=1.2。
[0062]
有益效果
[0063]
本发明提出的一种回转类零件特征识别方法,是一种融合图与数控工艺解析的加工特征识别方法。首先利用面属性邻接图对回转类零件设计模型进行表示,并使用凸边分
解方法对面属性邻接图进行预分割,从而得到多个加工区域图;然后,逐个判断加工区域图是否表示一个孤立特征,如果是,则直接进行模板匹配——计算该加工区域图与特征模板库中模板的相似度,并取与之相似度最大的模板对应的特征类别作为该孤立特征最终的识别结果;反之,如果加工区域图表示一个相交区域,则需要通过数控工艺解析的方法首先将相交区域中的特征分割出来,并对这些特征进行模板匹配,从而识别出其特征类别。通过上述流程即可以完成对整个回转类零件的特征识别。
附图说明
[0064]
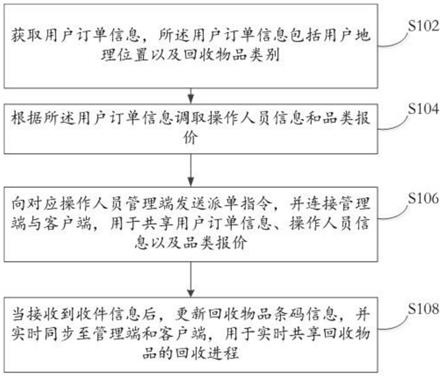
图1是本发明方法的流程图。
[0065]
图2是回转类零件面属性邻接图以及凸边分解后的加工特征图示例图。
[0066]
图3是回转类零件中非基面和不同类型的基面示例图。
[0067]
图4是判断回转类零件基面是否为完整回转面的示意图。
[0068]
图5是回转类零件基面集示例图。
[0069]
图6是从回转类零件相交区域分割出的加工特征示例图。
[0070]
图7是一个回转类零件的特征识别结果。
具体实施方式
[0071]
现结合实施例、附图对本发明作进一步描述:
[0072]
本发明采用的技术方案包括以下步骤:参照图1的总体流程图:
[0073]
步骤一、回转类零件设计模型预分割。本发明首先利用面属性邻接图对回转类零件进行描述,而后采用凸边分解方法将面属性邻接图分割为多个加工区域图。所述面属性邻接图中每个节点表示零件的一个面,其包含面的三种属性——面的类型(平面、柱面、锥面等)、面的凸凹性(凹面、凸面和平面)以及面的内外性(外型面、内型面和平面);面属性邻接图中连接节点的边表示零件中相邻面之间的相交边,其包含相交边的两种属性——边的凸凹性(凸边、凹边、凹切边和凸切边)和边的类型(直线边、圆弧边、椭圆边等)。所述加工区域图是一个凹子图。其中,凹子图中任意2个顶点之间均存在一条凹路径(凹路径中所有边均为非凸边)。
[0074]
参照图2,使用面属性邻接图对一个机匣类零件进行表示,并使用凸边分解方法将其分割为多个加工特征图。属性邻接图中边线上的数字表示一条边的凸凹性——0表示凸边或者凸切边,1表示凹边或者凹切边。图中的每个虚线框表示一个加工特征图。
[0075]
步骤二、判断加工区域图表示孤立特征还是相交区域。所述孤立特征的定义为:在一个加工区域图g=(v,e)中,若边集e中的所有边均为非凸边(凹边、凹切边等),则认为该加工区域图对应于零件中的加工区域表示一个孤立特征。所述相交区域的定义为:对于加工区域图g=(v,e),若边集e中存在凸边或者凸切边,则认为该加工区域图对应于零件中的加工区域为相交区域。若加工区域图表示孤立特征,则进入步骤四直接进行特征模板匹配;若加工区域图表示相交区域,则进入步骤三进行特征分割。
[0076]
根据定义判断加工特征图表示孤立特征还是相交区域。参照图2,{f2}、{f6}、{f7}、{f8}、{f9}、{f
16
}、{f
19
}、{f
21
}、{f
24
}、{f
26
}、{f
27
}、{f
29
}、{f
30
}、{f
31
}、{f
32
}、{f
33
}和{f
12
,f
13
,f
35
}均表示孤立特征,而{f1,f3,f4,f5,f
10
,f
11
,f
12
,f
13
,f
14
,f
15
,f
17
,f
18
,f
20
,f
22
,f
23
,f
25
,f
28
,f34
}表示一个相交区域。对于孤立特征,直接进入步骤四进行特征模板匹配;对于相交区域,首先进入步骤三进行特征分割以得到若干加工特征,而后再对这些加工特征进行特征模板匹配。
[0077]
步骤三、相交区域特征分割。采用基于数控工艺解析的方法对所述相交区域对应的加工区域图进行分割以得到若干个加工特征。首先,基于数控工艺解析的方法确定相交区域中的基面与非基面,并识别基面的类型;而后,根据基面的类型构造基面集;最后,基面集通过一定规则与非基面进行组合得到若干个加工特征。
[0078]
首先,参照图3和图4,确定相交区域中的基面和非基面,并通过判断基面回转面的完整性来识别基面的类型(可车基面、不可车基面和部分可车基面);而后,根据基面的类型构造基面集,参照图5,其中展示了两种不同类型的基面集,由bf1、bf2与bf3组成一个不可车基面集bfs1,其邻接属性图为g1;bf4与bf5组成一个可车基面集bfs2,其邻接属性图为g2;最后,参照图6,将基面集通过一定规则与非基面进行组合得到多个加工特征。完成相交区域特征分割后进入步骤四进行特征模板匹配。
[0079]
所述基面的定义为:在一个回转类零件中,对于一个不为圆角面的回转面,若其回转轴与零件整体的回转轴共线,则认为该面为一个基面。根据数控工艺的类型,将基面划分为完全可车基面,不可车基面以及部分可车基面三类。在仅考虑零件几何信息的情况下,对于一个回转类零件中的面,若该面上的任何一个部位均可以考虑通过车削工艺进行加工,则将其看作为完全可车基面;若该面上存在无法通过车削工艺直接加工的部位,则将其看作为部分可车基面,部分可车基面中同时包含了可车部分和不可车部分;若该面上的所有部位均无法采用车削工艺进行加工,则将其看作为不可车基面。对于回转类零件的面,除去被识别为基面bf的面,其余面均为非基面。
[0080]
所述基面集的定义为:对于一组由基面组成的集合,如果满足以下三个条件:1)集合中的基面同属一种类别;2)集合对应的面邻接属性图g=(v,e)只包含一个联通分量;3)面邻接属性图g的边集e中的所有边均为非凸边;则认为这组基面所组成的集合为一个基面集,记作bfs,且bfs={bf1,bf2,...,bfn},其中bfi表示基面集中第i个基面,i=1,2,...,n。本发明中,回转类零件的一个相交区域中可能包含多个基面集,且这些基面集之间的交集必定为空集。同时,相交区域中的每个加工特征至多包含一个基面集,且不同加工特征中的基面集不同。本发明将基面集划分为完全可车基面集、不可车基面集和部分可车基面集。将由完全可车基面组成的基面集作为完全可车基面集,并将以完全可车基面集为基础的加工特征看作为可车区域;将由不可车基面组成的基面集作为不可车基面集,并将以不可车基面集为基础的加工特征看作为不可车区域;将由部分可车基面组成的基面集作为部分可车基面集,并将以部分可车基面集为基础的加工特征看作为部分可车区域。
[0081]
具体来说,首先,根据基面的定义找到零件中所有的基面,并通过判断基面是否为一个完整的回转面来判断基面的类型。采用不同建模软件对零件的表达形式可能不同,譬如,使用catia建模得到的完整环形面是由两个半环形面组合而成,而使用nx建模得到的完整环形面则是直接由一个面构成。由于本发明是建立在nx12.0二次开发的基础上,因此在处理使用catia等其他cad软件构建的三维模型时,需要将其转化为stp格式。
[0082]
采用如下的方法判断基面bf的类型:
[0083]
1)判断基面bf是否为完整的回转面。首先,使用nx12.0中的askfaceuvminmax命令
分别计算出基面bf上最大和最小的u、v值并分别记作为u
max
,u
min
,v
max
,v
min
,分别计算u
max
和u
min
的均值u
ave
以及v
max
和v
min
的均值v
ave
;而后分别获取(u
ave
,v
ave
)处沿u方向和v方向的一阶导数。如果沿u方向一阶导数的矢量与基面回转轴垂直,则分别计算(u
max
,v
min
)和(u
max
,v
max
)处点的坐标,若两处点的坐标重合,则说明基面bf为一个完整回转面,否则认为是一个不完整的回转面;如果沿v向一阶导数的矢量与基面回转轴垂直,则分别计算(u
min
,v
min
)和(u
max
,v
min
)处点的坐标,若两处点的坐标重合,则说明基面bf为一个完整回转面,否则认为是一个不完整的回转面。
[0084]
2)如果基面bf是一个完整的回转面,则只需要判断与该基面相邻且相交边为非凸边的面是否都为基面或者回转轴与零件回转轴共线的圆角面,若是,则说明该基面是完全可车基面,反之,需要继续判断基面的类型。
[0085]
3)如果基面bfi是一个不完整的回转面,则首先判断是否存在一个基面bfj(i≠j)使得其与bfi之间至少存在两条类型为非凸边(凹边、凹切边)的相交边;如果不存在,则认为基面bfi为不可车基面;如果存在,则判断bfi与bfj之间的相交边是否均为圆弧线,若不是,则认为bfi与bfj可以组成一个完整的回转面;若是,则需要判断圆弧线的起点和终点到bfi回转轴的距离是否相同;若不同,则认为bfi与bfj可以组成一个完整回转面;若相同,则判断圆弧线的起点和终点之间的连线是否与bfi的回转轴垂直;若不垂直,则认为bfi与bfj组成了一个完整的回转面;若垂直,则认为bfi与bfj无法组成一个完整回转面。通过上述方法判断基面bfi是否可以与其他基面组成一个完整的回转面,如果不可以,则认为基面bfi为不可车基面,反之,需要继续判断基面的类型。
[0086]
4)针对一个完整的回转面,如果该回转面仅由一个基面构成,则首先直接提取该基面所有非凸边并组成一个集合,记concaveedge={e1,e2,...,en},其中ei表示集合中的第i条非凸边,i=1,2,
…
,n;如果该回转面不止由一个基面够成,则首先在删除组成该完整回转面的所有面之间的相交边后,再提取这些基面的所有非凸边并组成集合concaveedge。而后,根据这些非凸边之间的相邻情况获取组成整个回转面的所有环,并构成一个集合,记faceloops={l1,l2,...,ln},其中li表示组成该回转面的第i个环,i=1,2,
…
,n。之后,对每个环中的边进行离散化处理以分别得到每个环对应的点云数据,并记pointsets={ps1,ps2,...,psn},其中元素psi表示环li经过离散化后得到的点集,i=1,2,
…
,n,记psi={p1,p2,...,pm},其中元素pk表示点集psi中的第k个点,k=1,2,
…
,m。然后,分别将psi中的点投影至零件的回转轴v0上,根据这些投影点到回转轴原点originpoint(x0,y0,z0)的距离的最大值和最小值得到psi对应的投影区间ii,记s={i1,i2,...,in},其中ii=[d
min
,d
max
],d
min
=min{d1,d2,...,dm},d
max
=min{d1,d2,...,dm},元素dk表示点集psi中第k个点pk(xk,yk,zk)对应的投影点到originpoint的距离,k=1,2,
…
,m,dk表达式如下:
[0087][0088]
式中vk表示由点originpoint指向点pk的向量,vk=(x
k-x0,y
k-y0,z
k-z0)。最后,判断集合s中的所有区间的长度是否都为0,若是,则认为组成该完整回转面的所有基面均为完全可车基面,反之,采用线性扫描法判断s中所有区间的并集是否为一个连续的区间,若是,则认为组成该完整回转面的所有基面均为不可车基面,若不是,则认为组成该完整回转面的所有基面均是部分可车基面。
[0089]
完成对基面类型的识别后,根据基面集的定义构造不同类型的基面集。而后根据这些不同类型的基面集通过一定的规则构造加工区域。具体而言:
[0090]
1)针对一个完全可车基面集ctbfs,给定集合找到与ctbfs中基面相邻且相交边为非凸边的所有非基面,并将这些非基面与ctbfs中的面共同加入到tfs中,则集合tfs中的面即可以共同组成一个可车区域。
[0091]
2)针对一个不可车基面集ntbfs,通过以下算法将相交区域中的不可车区域分割出来:
[0092]
step1.输入相交区域中的一个不可车基面集ntbfs,并给定集合
[0093]
step2.寻找与ntbfs中基面相邻且相交边为非凸边的所有非基面,并将这些面组成的集合记作nfs0。将ntbfs中的面与nfs0中的面都加入到ntfs中;
[0094]
step3.k=0;
[0095]
step4.给定集合将相交区域中满足以下条件的面f加入到ntfs中:1)使得f与nf相邻且二者相交边为非凸边;2)f不是基面;3)与f相邻且相交边为非凸边的面均不是基面;4)若f与ntf相邻,其相交边为非凸边。
[0096]
step5.判断是否存在与f相邻且相交边为凸边的基面,若存在,不进行任何操作,若不存在,则将f加入到nfs
k 1
中;
[0097]
step6.判断nfs
k 1
是否为空集,若是,则输出ntfs,并将该面集合作为一个不可车区域;若不是,令k=k 1,并转step3。
[0098]
3)针对一个部分可车基面集ptbfs,给定集合寻找与ptbfs中基面相邻且相交边为非凸边的所有非基面,把这些非基面与ptbfs中的面共同加入到ptfs中。集合ptfs中的面即可以共同组成一个部分可车区域。
[0099]
完成上述流程以对加工区域进行构建。若仍然存在未能归类的面——不属于tfs、ntbfs和ptbfs中的任意一个集合,则通过以下步骤继续对这些面进行归类:首先,将这些未能归类的面放入一个集合,并构建其对应的面邻接属性图;而后,将面邻接属性图中每个联通分量对应的面集合作为一个不可车区域。
[0100]
通过上述流程完成对一个相交区域的特征分割。
[0101]
步骤四:使用特征模板库中的模板对从零件中分割出来的孤立特征以及从相交区域中分割出来的加工特征进行匹配以完成特征识别。特征以及从相交区域中分割出来的特征区域进行匹配以完成对整个零件的特征识别。图7为一个回转类零件的特征识别结果。
[0102]
其中,特征模板库中的模板均使用面属性邻接图进行表示。具体而言,首先,获取从零件中分割出来的孤立特征或者从相交区域中分割出来的加工特征属性邻接图g1;而后,获取g1中节点个数记为n1;然后,在特征模板库中找到节点个数在区间[a
·
n1,b
·
n1]中的所有模板(其中a和b均为常数,本发明取a=0.8、b=1.2),并采用下述方法逐个将这些模板与g1进行匹配以得到二者的相似度:对于区间内的任一模板g2,记其节点个数为n2,比较n1和n2的大小,将节点个数较少的图作为小图,把节点个数较多的图作为大图,并使用vf2算法进行子图同构,如果较小的图不是较大的图的一个子图,则认为g1和g2相似度为0,反之如果较小的图是较大的图的一个子图,利用下式计算二者的相似度:
[0103][0104]
其中,et
i(1)
和et
i(2)
分别表示待识别特征属性邻接图和模板中第i个节点的度;最后,将与g1相似度最大的模板作为该特征的最终识别结果。
[0105]
具体如下:
[0106]
步骤一、对零件cad模型进行预分割。采用面属性邻接图对机匣类零件进行描述,并利用凸边分解方法将该面属性邻接图分割为多个加工特征图。参照图2,使用面属性邻接图对一个机匣类零件进行表示,并使用凸边分解方法将其分割为多个加工特征图。属性邻接图中边线上的数字表示一条边的凸凹性——0表示凸边或者凸切边,1表示凹边或者凹切边。图中的每个虚线框表示一个加工特征图。
[0107]
步骤二、根据定义判断加工特征图表示孤立特征还是相交区域。参照图2,{f2}、{f6}、{f7}、{f8}、{f9}、{f
16
}、{f
19
}、{f
21
}、{f
24
}、{f
26
}、{f
27
}、{f
29
}、{f
30
}、{f
31
}、{f
32
}、{f
33
}和{f
12
,f
13
,f
35
}均表示孤立特征,而{f1,f3,f4,f5,f
10
,f
11
,f
12
,f
13
,f
14
,f
15
,f
17
,f
18
,f
20
,f
22
,f
23
,f
25
,f
28
,f
34
}表示一个相交区域。对于孤立特征,直接进入步骤四进行特征模板匹配;对于相交区域,首先进入步骤三进行特征分割以得到若干加工特征,而后再对这些加工特征进行特征模板匹配。
[0108]
步骤三、相交区域特征分割。首先,参照图3和图4,确定相交区域中的基面和非基面,并通过判断基面回转面的完整性来识别基面的类型(可车基面、不可车基面和部分可车基面);而后,根据基面的类型构造基面集,参照图5,其中展示了两种不同类型的基面集,由bf1、bf2与bf3组成一个不可车基面集bfs1,其邻接属性图为g1;bf4与bf5组成一个可车基面集bfs2,其邻接属性图为g2;最后,参照图6,将基面集通过一定规则与非基面进行组合得到多个加工特征。完成相交区域特征分割后进入步骤四进行特征模板匹配。
[0109]
步骤四、使用特征模板库中的模板对从零件中分割出来的孤立特征以及从相交区域中分割出来的特征区域进行匹配以完成对整个零件的特征识别。图7为一个回转类零件的特征识别结果。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。