1.本发明涉及共轴双旋翼直升机领域,特别是涉及旋翼变距摇臂尺寸优化方法及使用其的无人直升机。
背景技术:
2.相比常规单旋翼带尾桨无人直升机或者多旋翼无人直升机,共轴双旋翼无人直升机能够在相同的外形或旋翼尺寸下获得更高的升力,因此可以设计得更加小巧便携,因此在航空摄影、军事侦测等领域日益重要。
3.现有的铰接式无人直升机旋翼的挥舞铰或多或少都有一定的外伸量,特别的是共轴双旋翼无人直升机,为满足折叠功能,挥舞铰外伸量会更大。外伸量的存在影响了旋翼的挥舞特性,导致挥舞频率变高,挥舞响应滞后角明显小于外伸量为零时的理论值(接近90
°
),而现有共轴双旋翼无人机通常采用滞后角为90
°
来进行设计,使得无人机的控制力矩严重过小,进而导致无人机抗风能力差、操纵响应慢。
技术实现要素:
4.本发明旨在至少解决现有技术中存在的技术问题之一。为此,本发明提出旋翼变距摇臂尺寸优化方法,能够提高无人机的控制力矩至原有的1.5至2倍,使得无人机控制响应更快,抗风扰能力更强,飞行更安全。
5.还提出一种基于上述方法制作的无人直升机;
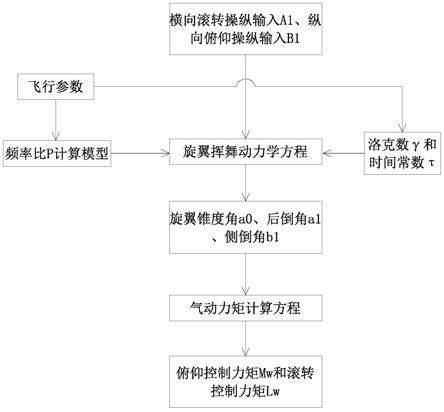
6.本发明第一方面实施例所采用的技术方案是:一种旋翼变距摇臂尺寸优化方法,用于旋翼可折叠的直升机,包括:步骤1,基于直升机的挥舞铰外伸量e,获取旋翼的挥舞频率p、洛克数γ、时间常数τ;步骤2,基于所述挥舞频率p、所述洛克数γ、所述时间常数τ、横向操纵输入变矩角a1和纵向操纵输入变矩角b1,获取旋翼的锥度角a0、后倒角a1和侧倒角b1;步骤3,基于所述锥度角a0、所述后倒角a1和所述侧倒角b1,获取旋翼的俯仰控制力矩mw和滚转控制力矩lw;步骤4,基于所述俯仰控制力矩mw或所述滚转控制力矩lw,获取旋翼的纵向周期变距值和横向周期变距值;步骤5,通过所述纵向周期变距值和所述横向周期变距值反向获取变矩摇臂的相位角θ,以得到变距摇臂的不同相位角θ对应的俯仰控制力矩mw或所述滚转控制力矩lw。
7.根据本发明第一方面实施例的旋翼变距摇臂尺寸优化方法,至少具有如下有益效果:通过计算得出变距摇臂的不同相位角θ对应的俯仰控制力矩mw或滚转控制力矩lw,以俯仰控制力矩mw为例,在得到不同相位角θ对应的俯仰控制力矩mw后,可通过选取俯仰控制力矩mw最大力矩处对应的相位角进行无人机的设计,使得此时无人机的俯仰控制力矩mw将大于常规设计,且可提升至常规设计的1.5至2倍,使得无人机控制响应更快,抗风扰能力更强,飞行更安全。
8.根据本发明的一些实施例,在步骤1中,所述挥舞频率p的计算公式如下:
[0009][0010]
其中,p为挥舞频率比,k
β
为挥舞铰弹性系数,e为挥舞铰外伸量,m
β
为挥舞铰质量矩,i
β
为挥舞铰惯性矩,ω为旋翼的转速;
[0011]
所述洛克数γ的计算公式如下:
[0012][0013]
其中,ρ为空气密度,a为桨叶翼型升力线斜率系数,c为桨叶的平均气动弦长。
[0014]
所述时间常数τ的计算公式如下:
[0015][0016]
其中,ω为旋翼的转速,γ为所述洛克数。
[0017]
根据本发明的一些实施例,在步骤2中,通过一阶挥舞动力学方程组,获取旋翼的锥度角a0、后倒角a1和侧倒角b1,其具体方程如下:
[0018][0019]
其中,θ0为总矩角,g为重力加速度值,δ为旋翼旋转方向修正系数,右旋为1,左旋为-1,ηc为动态耦合率,η
cc
为操纵耦合率,q为俯仰角速度,p为滚转角速度。
[0020]
根据本发明的一些实施例,在步骤2中,所述动态耦合率ηc和和操纵耦合率η
cc
通过下式计算:
[0021][0022][0023]
根据本发明的一些实施例,在步骤3中,通过气动力矩计算方程,获取旋翼的俯仰控制力矩mw和滚转控制力矩lw,其具体方程如下:
[0024][0025][0026]
其中,nb为桨叶的片数,为挥舞铰外伸无量纲量,r为旋翼半径。
[0027]
根据本发明的一些实施例,在步骤3中,所述相位角θ与所述横向操纵输入变矩角a1、所述纵向操纵输入变矩角b1通过下式关联:
[0028][0029]
本发明第二方面实施例所采用的技术方案是:一种无人直升机,包括:所述变距摇臂的相位角θ根据本发明第一方面所述的旋翼变距摇臂尺寸优化方法确定。
[0030]
根据本发明的一些实施例,包括机身;共轴设置的上旋翼和下旋翼,所述上旋翼和所述下旋翼设置于所述机身的顶部,所述上旋翼包括不少于两个的上旋翼旋转单元,所述下旋翼包括不少于两个的下旋翼旋转单元;
[0031]
所述上旋翼旋转单元包括上桨叶450;上摆振铰440,所述上桨叶450安装于所述上摆振铰440上;上挥舞铰430,所述上挥舞铰430外伸量e不小于无人机机身半径,所述上摆振铰440安装于所述上挥舞铰430上,所述上桨叶450通过所述上摆振铰440绕所述上挥舞铰430向下转动贴合至所述机身上;
[0032]
所述下旋翼旋转单元包括下桨叶;下摆振铰,所述下桨叶安装于所述下摆振铰上;下挥舞铰,所述下挥舞铰外伸量e不小于无人机机身半径,所述下摆振铰安装于所述下挥舞铰上,所述下桨叶通过所述下摆振铰绕所述下挥舞铰向下转动贴合至所述机身上。
[0033]
本发明的附加方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本发明的实践了解到。
附图说明
[0034]
本发明的上述和/或附加的方面和优点从结合下面附图对实施例的描述中将变得明显和容易理解,其中:
[0035]
图1为本发明实施例旋翼变距摇臂尺寸优化方法的流程图;
[0036]
图2为本发明实施例可折叠共轴双翼无人机旋翼展开状态的示意图;
[0037]
图3为本发明实施例可折叠共轴双翼无人机旋翼折叠状态的示意图;
[0038]
图4为本发明实施例可折叠共轴双翼无人机旋翼的分解示意图;
[0039]
图5为本发明实施例可折叠共轴双翼无人机上旋翼变距铰组件细节示意图;
[0040]
图6为本发明实施例可折叠共轴双翼无人机系统控制力矩测量装置结构示意图;
[0041]
图7为本发明实施例横坐标为90-θ、纵坐标为滚转控制力矩lw的曲线拟合图。
[0042]
附图标记:
[0043]
100-机身;200-旋翼电机;300-旋翼主轴;
[0044]
400-上旋翼;410-上旋翼桨毂;420-上旋翼变距铰组件;421-上旋翼变距杆;422-上旋翼变距铰;423-上旋翼变矩连杆;424-上旋翼变矩摇臂;425-上旋翼倾斜盘支臂;430-上挥舞铰;440-上摆振铰;450-上桨叶;
[0045]
500-下旋翼;510-下挥舞铰;520-下摆振铰;530-下桨叶;
[0046]
相位角θ。
具体实施方式
[0047]
下面详细描述本发明的实施例,所述实施例的示例在附图中示出,其中自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。下面通过参考附
图描述的实施例是示例性的,仅用于解释本发明,而不能理解为对本发明的限制。
[0048]
在本发明的描述中,需要理解的是,涉及到方位描述,例如上、下、前、后、左、右等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
[0049]
在本发明的描述中,若干的含义是一个或者多个,多个的含义是两个以上,大于、小于、超过等理解为不包括本数,以上、以下、以内等理解为包括本数。如果有描述到第一、第二只是用于区分技术特征为目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量或者隐含指明所指示的技术特征的先后关系。
[0050]
本发明的描述中,除非另有明确的限定,设置、安装、连接等词语应做广义理解,所属技术领域技术人员可以结合技术方案的具体内容合理确定上述词语在本发明中的具体含义。
[0051]
另外,本发明各个实施例之间的技术方案可以相互结合,但是必须是以本领域普通技术人员能够实现为基础,当技术方案的结合出现相互矛盾或无法实现时应当认为这种技术方案的结合不存在,也不在本发明要求的保护范围之内。
[0052]
参照图1,根据本发明的第一方面实施例的旋翼变距摇臂尺寸优化方法,用于旋翼可折叠的直升机,包括:
[0053]
步骤1,基于挥舞铰的外伸量e,获取旋翼的挥舞频率p、洛克数γ、时间常数τ;
[0054]
其中,洛克数γ表征桨叶气动力与惯性力的比值。
[0055]
步骤2,基于挥舞频率p、洛克数γ、时间常数τ、横向操纵输入变矩角a1和纵向操纵输入变矩角b1,获取旋翼的锥度角a0、后倒角a1和侧倒角b1;
[0056]
其中,横向操纵输入变矩角a1和纵向操纵输入变矩角b1是指在操纵者的控制下无人机沿横向移动或纵向移动过程中输入的角度值。
[0057]
旋翼的锥度角a0是指竖向飞行过程中,旋翼与水平面形成的夹角,此时旋翼形成尖部朝下的旋翼椎体。
[0058]
旋翼的后倒角a1是指向前飞过程中,旋翼锥体向后倾倒,旋翼椎体倾倒的角度即为后倒角a1。
[0059]
旋翼的侧倒角b1是指向侧面飞行过程中,旋翼锥体向90
°
方位倾倒一个角度,称为侧倒角b1。
[0060]
步骤3,基于锥度角a0、后倒角a1和侧倒角b1,获取旋翼的俯仰控制力矩mw和滚转控制力矩lw;
[0061]
步骤4,基于俯仰控制力矩mw或滚转控制力矩lw,获取旋翼的纵向周期变距值和横向周期变距值;
[0062]
步骤5,通过纵向周期变距值和横向周期变距值反向获取变矩摇臂的相位角θ,以得到变距摇臂的不同相位角θ对应的俯仰控制力矩mw或滚转控制力矩lw。
[0063]
具体地,通过计算得出变距摇臂的不同相位角θ对应的俯仰控制力矩mw或滚转控制力矩lw,以俯仰控制力矩mw为例,在得到不同相位角θ对应的俯仰控制力矩mw后,可通过选取俯仰控制力矩mw最大力矩处对应的相位角进行无人机的设计,使得此时无人机的俯仰控制力矩mw将大于常规设计,且可提升至常规设计的1.5至2倍,使得无人机控制响应更快,抗
风扰能力更强,飞行更安全。
[0064]
参照图2、图3和图4,为方便理解,下面以可折叠共轴双翼无人机为例,进行示例性说明。
[0065]
可折叠共轴双翼无人机,包括圆柱状的机身100、旋翼电机200、旋翼主轴300、上旋翼400和下旋翼500。
[0066]
旋翼主轴300固定安装于机身100上,旋翼电机200的定子固定安装于旋翼主轴300上,旋翼电机200的转子与旋翼主轴300同轴设置,上旋翼400、下旋翼500均与旋翼电机200的转子固定连接。
[0067]
参照图4与图5,其中,上旋翼400包括上旋翼桨毂410、上旋翼变距铰组件420、上挥舞铰430、上摆振铰440和上桨叶450。上旋翼桨毂410与旋翼电机200的转子固定连接,上旋翼400变矩铰组件安装于上旋翼桨毂410上,以驱使上旋翼400变距铰422绕旋翼主轴300的轴线在一定范围内偏转,实现无人机的转向,上挥舞铰430安装于上旋翼变距铰组件420上,上摆振铰440安装于上挥舞铰430上,上桨叶450安装于上摆振铰440上。
[0068]
参照图4与图5,其中,上旋翼变距铰组件420包括上旋翼变距杆421、上旋翼变距铰422、上旋翼变距连杆423、上旋翼变距摇臂424、上旋翼倾斜盘支臂425,上旋翼变距杆421与上旋翼桨毂410固定相连,且上旋翼变距杆421的轴心垂直于旋翼主轴300的轴心,上旋翼变距铰422设置于上旋翼变距杆421的侧面,上旋翼变距摇臂424固定安装于上旋翼400变距铰422上,上旋翼变距连杆423一端通过上旋翼变距摇臂424轴承与上旋翼变距摇臂424末端相连,另一端通过球铰与上旋翼倾斜盘支臂425末端相连。
[0069]
参照图6,此外,旋翼的变距摇臂的相位角θ是指变距摇臂末端轴承中心到所在旋翼桨毂中心的连线与旋翼变距铰轴线形成的夹角,可通过改变旋翼变距摇臂的尺寸进而改变其相位角θ。
[0070]
其中,挥舞铰,也叫水平铰,常规设计是在桨叶的根部设置一个水平的轴孔,通过插销与旋翼变距铰组件相连,这种连接方式允许桨叶在一定幅度范围内挥舞。这样一来桨叶在前行时,由于升力增加,自然向上挥舞,其运动的实际方向不再是水平,而是斜线向上的,桨叶实际的迎角也由于这种运动而减小,升力降低。桨叶在后行时,升力不足,自然下降,这种边旋转边下降的运动,使桨叶的实际迎角增大,升力增加。同时由于离心力的存在,桨叶会有自然拉直的趋势,因此不会在升力作用下无限升高或降低,也就是说桨叶的挥舞幅度不是无限的。
[0071]
此外,还可通过挥舞铰实现旋翼的折叠功能,但在实现折叠功能时,挥舞铰外伸量e将不可避免的需要超出或等于机身100的尺寸,使得旋翼在折叠时,能够折叠至与机身100相贴合,而在挥舞铰外伸量e小于机身100尺寸时,旋翼将与机身100干涉,无法完全折叠至机身100的侧面。例如,旋翼直径展开后约为600mm,机身100半径为140mm,折叠之后旋翼将与机身100贴合,使得折叠后机身100的整体半径尺寸仅略大于140mm。
[0072]
其中,摆振铰,也叫“垂直铰”,常规设计是在桨叶的根部再设置一个垂直的轴孔,通过插销与旋翼变距铰组件相连,这种连接方式允许桨叶前后小幅度摆动,从而避免桨叶根部变弯或疲劳断裂。并且,摆振铰也可使用柔性材料代替。
[0073]
在本发明的一些具体实施例中,在步骤1中,挥舞频率p的计算公式如下:
[0074][0075]
其中,p为挥舞频率比,k
β
为挥舞铰弹性系数,e为挥舞铰外伸量,m
β
为挥舞铰质量矩,i
β
为挥舞铰惯性矩,ω为旋翼的转速;
[0076]
洛克数γ的计算公式如下:
[0077][0078]
其中,ρ为空气密度,a为桨叶翼型升力线斜率系数,c为桨叶的平均气动弦长。
[0079]
时间常数τ的计算公式如下:
[0080][0081]
其中,ω为旋翼的转速,γ为洛克数。
[0082]
在本发明的一些具体实施例中,在步骤2中,通过一阶挥舞动力学方程组,获取旋翼的锥度角a0、后倒角a1和侧倒角b1,其具体方程如下:
[0083][0084]
其中,θ0为总矩角,g为重力加速度值,δ为旋翼旋转方向修正系数,右旋为1,左旋为-1,ηc为动态耦合率,η
cc
为操纵耦合率,q为俯仰角速度,p为滚转角速度。
[0085]
由一阶动力学挥舞方程组可以看出,挥舞铰外伸量e会影响挥舞频率比p,进而影响挥舞的运动特性,即影响旋翼的锥度角a0、后倒角a1和侧倒角b1的大小。
[0086]
在本发明的一些具体实施例中,在步骤2中,动态耦合率ηc和和操纵耦合率η
cc
通过下式计算:
[0087][0088][0089]
在本发明的一些具体实施例中,在步骤3中,通过气动力矩计算方程,获取旋翼的俯仰控制力矩mw和滚转控制力矩lw,其具体方程如下:
[0090][0091][0092]
其中,nb为桨叶的片数,为挥舞铰外伸无量纲量,r为旋翼半径。
[0093]
具体地,在本实施例中,nb=2,通过上式可知,俯仰控制力矩mw和滚转控制力矩lw的计算公式比较复杂,它不是单一变量横向操纵输入变距角a1和纵向操纵输入变距角b1的函数,还与挥舞铰外伸量e有关。比如,当需要进行俯仰控制,输入a1≠0,b1=0时,俯仰控制力矩mw的值并不是最大,并且滚转控制力矩lw≠0,即出现了俯仰和横滚耦合在一起,浪费掉了部分力矩。
[0094]
在本发明的一些具体实施例中,在步骤3中,相位角θ与横向操纵输入变距角a1、纵向操纵输入变距角b1通过下式关联:
[0095][0096]
具体地,通过将横向操纵输入变距角a1和纵向操纵输入变距角b1通过上式关联,以消除俯仰和横滚耦合的情况,进而提高对应通道的控制力矩。
[0097]
参照图7,为方便理解,下面以一个具体地实施例为例,进行示例性说明。
[0098]
设置a1′
=定值,b1=0,然后通过修改变距摇臂的相位角θ,代入上述方程中,计算得到对应的俯仰控制力矩mw或滚转控制力矩lw,以滚转控制力矩lw为例,其具体曲线图如图7所示
[0099]
在图7中,横坐标为90-θ,纵坐标为滚转控制力矩lw的大小,由图中可看出,当相位角θ为90
°
(对应上图横坐标为0
°
),滚转控制力矩lw为lw=2.8
·
m;当相位角θ为34
°
左右时(对应上图横坐标为56
°
),滚转控制力矩达到峰值,为lw=4.5n
·
m,控制力矩是原来的161%。由此可知通过修改相位角θ大小,可以显著的提高无人机的控制力矩。
[0100]
根据本发明的第二方面实施例的无人直升机,包括:变距摇臂的相位角θ根据本发明第一方面实施例的旋翼变距摇臂尺寸优化方法确定。
[0101]
无人直升机通过采用第一方面的旋翼变距摇臂尺寸的优化方法,制作与相位角θ相对应的变距摇臂,并安装至无人直升机上,以进一步的提高无人机的控制力矩,一般可至常规设计的1.5至2倍,使得无人机的使得无人机控制响应更快,抗风扰能力更强,飞行更安全。
[0102]
参照图2、图3与图4,在本发明的一些具体实施例中,包括机身100;共轴设置的上旋翼400和下旋翼500,上旋翼400和下旋翼500设置于机身100的顶部,上旋翼400包括不少于两个的上旋翼旋转单元,下旋翼500包括不少于两个的下旋翼旋转单元;
[0103]
上旋翼旋转单元包括上桨叶450;上摆振铰440,上桨叶450安装于上摆振铰440上;上挥舞铰430,上挥舞铰430外伸量e不小于无人机机身100半径,上摆振铰440安装于上挥舞铰430上,上桨叶450通过上摆振铰440绕上挥舞铰430向下转动贴合至机身100上;
[0104]
下旋翼旋转单元包括下桨叶530;下摆振铰520,下桨叶530安装于下摆振铰520上;下挥舞铰510,下挥舞铰510外伸量e不小于无人机机身100半径,下摆振铰520安装于下挥舞铰510上,下桨叶530通过下摆振铰520绕下挥舞铰510向下转动贴合至机身100上。
[0105]
具体地,通过上挥舞铰430和下挥舞铰510实现无人机的折叠功能。
[0106]
在本发明一些具体实施例中,包括机身100;共轴设置的上旋翼400和下旋翼500,上旋翼400和下旋翼500设置于机身100的顶部,上旋翼400包括不少于两个的上旋翼旋转单元,下旋翼500包括不少于两个的下旋翼旋转单元;
[0107]
上旋翼旋转单元包括根部为柔性材料制作的上桨叶450;上挥舞铰430,上挥舞铰
430的外伸量不小于无人机机身100半径,上桨叶450的根部安装于上挥舞铰430上,上桨叶450通过上挥舞铰430向下转动贴合至机身100上;
[0108]
下旋翼旋转单元包括根部为柔性材料制作的下桨叶530;下挥舞铰510,下挥舞铰510的外伸量不小于无人机机身100半径,下桨叶530的根部安装于下挥舞铰510上,下桨叶530通过下挥舞铰510向下转动贴合至机身100上。
[0109]
具体地,上桨叶450或下桨叶530根部的柔性材料可以代替上摆振铰440或下摆振铰520,以允许桨叶前后小幅度摆动,从而避免桨叶根部变弯或疲劳断裂。且同样通过上挥舞铰430和下挥舞铰510实现无人机的可折叠功能。
[0110]
当然,本发明并不局限于上述实施方式,熟悉本领域的技术人员在不违背本发明精神的前提下还可作出等同变形或替换,这些等同的变型或替换均包含在本技术权利要求所限定的范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。