技术特征:
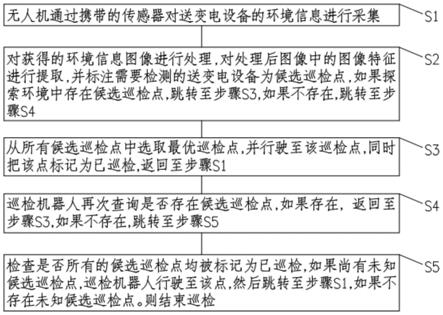
1.一种非结构环境下无人机送变电设备巡检方法,其步骤是:步骤一、无人机通过携带的传感器对送变电设备的环境信息进行采集;步骤二、对获得的环境信息图像进行处理,对处理后图像中的图像特征进行提取,并标注需要检测的送变电设备为候选巡检点,如果探索环境中存在候选巡检点,跳转至步骤三,如果不存在,跳转至步骤四;步骤三、从所有候选巡检点中选取最优巡检点,并行驶至该巡检点,同时把该点标记为已巡检,返回至步骤一;步骤四、巡检机器人再次查询是否存在候选巡检点,如果存在,返回至步骤三,如果不存在,跳转至步骤五;步骤五、检查是否所有的候选巡检点均被标记为已巡检,如果尚有未知候选巡检点,巡检机器人行驶至该点,然后跳转至步骤一,如果不存在未知候选巡检点。则结束巡检。2.根据权利要求1所述的非结构环境下无人机送变电设备巡检方法,其特征是:所述步骤一中,传感器为三维相机sr-3000、激光测距仪和陀螺仪。3.根据权利要求1所述的非结构环境下无人机送变电设备巡检方法,其特征是:所述步骤二中,图像处理及特征提取的步骤为:1)、对图像进行预处理,获得图像灰度及三维信息;2)、根据阈值标记灰度图像中的地面、天空和远景,并删除天空、远景和地面区域;3)、对标记天空和地面的图像进行二值化,感兴趣区域的灰度值用非零值表示,非感兴趣区域的灰度值用零表示;4)、利用像素的三维信息对灰度图像中已经提取出的感兴趣区域进行聚类,将感兴趣区域与非感兴趣区域的分离;5)、对图像中感兴趣区域当前相邻两点进行比较,如果两点之间的距离在一定范围内,则认为两个数据点属于相同的类,如果超过阈值,则认为两个点属于不同的类,并以当前数据点为新增类别的起始点,开始下一轮数据比较,完成二次聚类分析;6)、通过边缘检测确定和提取边缘,勾画出目标物体。4.根据权利要求3所述的非结构环境下无人机送变电设备巡检方法,其特征是:所述图像预处理的步骤为:采用均值滤波或中值滤波消除信号采集中产生的噪声,并采用线性灰度变换、非线性灰度变换或分段线性灰度变换对图像进行灰度变换。5.根据权利要求3所述的非结构环境下无人机送变电设备巡检方法,其特征是:图像标记的步骤为:1)、根据图像像素点的高度信息标记出图像上属于天空的区域,并将像素的高度值大于设定阈值的像素点对应的灰度值置零;2)、根据图像像素点的高度信息标记图像上地面区域,并将像素点的高度值小于阈值像素点对应的灰度值置零;3)、根据图像像素点的距离信息标记图像上的远景区域,并将像素点的距离值大于阈值像素点对应的灰度值置零。6.根据权利要求5所述的非结构环境下无人机送变电设备巡检方法,其特征是:在标记地面过程中,在非感兴趣区域内存在的部分不连续点,用腐蚀与膨胀运算处理二值图像,以去掉这些不连续点。7.根据权利要求1所述的非结构环境下无人机送变电设备巡检方法,其特征是:所述步骤三中,最优候选巡检点的确定方法为:采取mcdm(multi-criteria decision making)多
指标决策系统,依据评判条件综合考虑每个候选巡检点的多个评判指标获得评估值,对多个候选巡检点的评估值进行比较,选取具有最大评估值的候选巡检点作为最优巡检点,完成在多个候选巡检点中选取最优巡检点。8.根据权利要求7所述的非结构环境下无人机送变电设备巡检方法,其特征是:所述评判条件为:路程损耗、信息增益和旋转角度,其中,路程消耗:在一次巡检过程中,巡检机器人由当前巡检点行驶至目标巡检点所行驶的路程距离;信息增益:是指在巡检点获取的新环境信息,其包括新获得的环境面积和巡检点所在自由边界的长度;旋转角度:是指当前位置机器人的方向到达所选取巡检点所需旋转的角度。9.一种非结构环境下无人机送变电设备巡检系统,其特征在于:包括感知模块、自主模块和移动模块,其中:感知模块:为传感器部件,对送变电设备的环境信息进行采集;自主模块:对获得的环境信息图像进行处理,对处理后图像中的图像特征进行提取,并标注需要检测的送变电设备为候选巡检点,依据评判条件从所有候选巡检点中选取最优巡检点,并向移动模块发送使其移动至该巡检点的控制指令;移动模块:接收自主模块发送的控制指令,对相应的动力进行调整,使其向最优巡检点移动。
技术总结
本发明公开了一种非结构环境下无人机送变电设备巡检方法及系统,S1、通过传感器对环境信息进行采集;S2、对环境信息图像进行特征提取,标注需要检测的送变电设备为候选巡检点,若存在候选巡检点,转至S3,若不存在,转至S4;S3、从所有候选巡检点中选取最优巡检点,并行驶至该点,并把该点标记为已巡检,转至S1;S4、巡检机器人再次查询是否存在候选巡检点,若存在,转至S3,若不存在,转至S5;S5、检查是否所有的候选巡检点均被标记为已巡检,若有未知候选巡检点,巡检机器人行驶至该点,转至S1,若不存在未知候选巡检点,结束巡检;实现对巡检路径进行最优规划的同时,还能够在巡检过程中探索未知巡检环境,从而实现在未知非结构环境中的自助巡检。中的自助巡检。中的自助巡检。
技术研发人员:马磊 王耀东 王勇 孟大鹏 缑培培 付治宇 左魁生
受保护的技术使用者:国网河南省电力公司郑州供电公司 国家电网有限公司
技术研发日:2021.10.29
技术公布日:2022/3/21
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。