1.本发明涉及路径规划及自动导航路径跟踪控制领域,特别是自动投饵船的路径规划及其 自动导航控制。
背景技术:
2.我国的水产养殖产业居世界首位,在许多养殖环境中需要在特定区域内均匀投饵,但是 现存的均匀投饵技术存在诸如成本较高、均匀投饵精度低、实用性较差等缺陷,因此研究一 套成本低、控制简单、均匀投饵精度高的均匀投饵方法十分必要。
3.当前单抛盘投饵应用地比较广泛,其具有投饵成本低、控制简单等优点,应用在投饵船 上十分简便,但是单抛盘投饵具有饵料密度分布不均匀、不对称、纵向饵量密度分布中心偏 移等问题,不易实现高质量的均匀投饵。因此,研究一套基于单抛盘模型的高精度的均匀投 饵方法十分重要。
技术实现要素:
4.本发明在基于常规的回字形作业路径规划方法上,结合单抛盘投饵存在投饵密度分布不 均匀、不对称、纵向饵量密度分布中心偏移等问题,提出一种多行程饵料叠加的投饵方法, 从而解决投饵密度分布不均匀的问题。通过gps/bd导航系统和单抛盘模型规划投饵路径, 通过检测投饵区域和剩余饵量计算单位区域内投饵量进而调整船速和下料流量实现投饵饵 料均匀,采用实时动态插点路径跟踪控制算法,提高投饵船的直线路径跟踪的精度,航迹切 换时,通过设置线性减速区和线性加速区,采用低速过弯的方法实现平滑转弯,避免出现过 冲问题。
5.本发明的目的是为了解决现有的基于单抛盘投饵不均匀问题,以及弥补投饵船路径跟踪 精度不高的不足。本发明的投饵方法方法及路径跟踪控制方法可以在给定投饵区域内实现均 匀投饵。
6.本发明为解决上述问题,采用的技术方案包含以下步骤:
7.step1:通过多次实验计算单抛盘在不同转速nk时所对应的抛盘纵中线两侧的纵向密度 峰值1/2点与纵中线的横向距离|x
1(k)
|、|x
2(k)
|,以此计算所需投饵船作业路径之间距离d
1(k)
、 d
2(k)
。测得饵料密度中心mk在纵中线上的正投影点pk距抛盘的距离lk。将上述多次实验建 立的nk、d
1(k)
、d
2(k)
和lk按条目存表待查。
8.step2:使用船载gps/bd导航系统测得目标作业区边界处各个角点经纬度坐标并将其转 化为平面坐标,确定投饵作业边界,并计算需均匀投饵区域的面积s,使用称重传感器测取 饵量总重量q,计算单位区域内投饵量。
9.step3:根据step2确定的投饵区域,结合step1中建立的作业路径之间的距离d
1(k)
、d
2(k)
条目表,选取合适的抛盘转速nk,规划正逆回字形投饵船作业路径。
10.step4:从step3中确定的抛盘转速nk所对应的条目中找到lk,确定正投影点pk与gps/bd 天线g点之间的关系,将pk作为跟踪作业路径的当前位置。
11.step5:通过实时动态插点路径跟踪控制算法跟踪已规划的投饵船作业路径进行投饵作 业,并适时调整船速、下料流量和抛盘转速。
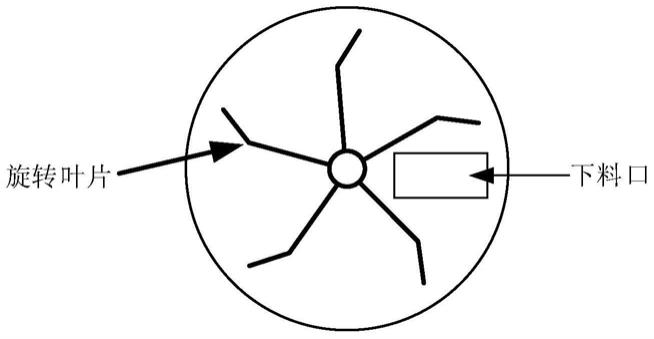
12.进一步,所述单抛盘投饵模型中下料口位于抛盘的单侧,旋转叶片以使下料口处饵料能 向外抛出的方向单向旋转,该投饵模型控制简单,投饵效率高。但由此导致实际投饵区域中 心mk较抛盘中轴线偏离抛盘下料口侧,且投饵密度由中心点mk向两侧递减,且饵料呈非对 称、不均匀分布,密度中心侧纵向饵量密度递减平缓,另一侧纵向饵量密度递减迅速。
13.进一步,所述投饵抛盘由直流电机驱动,饵料下料流量由下料机构控制,饵料下料流量 与船速呈正比例关系,通过实时检测船速控制下料机构调整下料流量。船载gps/bd导航系 统的天线水平安装在船体纵中线上,投饵抛盘倾斜向上安装在船体纵中线的正后下方。
14.进一步,所述step1中计算所需投饵船作业路径之间距离的方法如下,实验、拟合得到 单抛盘在转速nk时所对应的纵向饵量密度曲线ω=fk(x),确定密度为密度峰值1/2时对应的 两个横坐标x
1(k)
和x
2(k)
,由下式确定d
1(k)
、d
2(k)
。
15.进一步,当单向回字形投饵船作业路径保持d
1(k)
d
2(k)
距离,且正逆回字形路径之间 保持d
2(k)
距离,所投饵料密度将叠加至在密度峰值附近波动,实现均匀投饵。
16.进一步,确定pk(x,y)与gps/bd天线g(x0,y0)之间的关系的方法如下:
[0017][0018]
其中为投饵船控制系统测得的当前航向角,lk已在step1中测得。将pk作为投饵船跟 踪作业路径的当前位置,以它与规划作业路径的偏移量作为投饵船与规划路径的偏移量。
[0019]
进一步,所述step3中规划正逆回字形投饵船作业路径的方法如下:
[0020]
(a):通过gps/bd导航系统确定矩形作业区域四个顶点,顺时针依次为a(x1,y1)、 b(x2,y2)、c(x3,y3)、d(x4,y4);
[0021]
(b):从abcd边界向内确定有效均匀投饵边界a1b1c1d1,其与abcd的距离等于抛盘最 大转速时纵向密度峰值1/2处距饵料外边界的距离;
[0022]
(c):首先,从step1建立的条目表中选取单向最大作业路径间距d
1(k)
d
2(k)
,向上取 整计算单向回字形作业路径的圈数(假设有效均匀投饵区域a1b1c1d1的窄 边长为x)。然后,由确定实际所需的单向作业路径间距d
1(k)
d
2(k)
。最后,根据所确定 的d
1(k)
d
2(k)
,从step1建立的条目表中选取实际需要的d
1(k)
、d
2(k)
及其对应的抛盘转速nk;
[0023]
(d):从距a1b1c1d1的长边处开始规划作业路径,正逆回字形路径最外圈距 a1b1c1d1边界距离,同圈正逆作业路径之间的距离为d1,以此得到作业路径t0→
t1→ꢀ
t2→…→
tk→
t
k 1
…→
t
n-1
→
tn,其中t0为起始点,tn为投饵路径终点,t
k 1
为正逆回 字形路径的转换点。
[0024]
进一步,所述直线路径跟踪的实时动态插点路径跟踪控制算法如下:
[0025]
(a):由投饵船的当前位置pk获得其在当前所跟踪直线路径上的正投影点h。
[0026]
(b):将h点沿当前跟踪路径向前延伸x长度记为点e,将e作为实时跟踪目标点,对点e进 行实时跟踪。
[0027]
(c):不停重复上述(a)和(b),以达到实时动态地跟踪当前规划直线路径的效果。
[0028]
上述实时跟踪目标点的方法如下,通过gps/bd测取当前船速v,计算实时跟踪目标点e 的延伸距离x=c
1-c2l c3v,其中c1为常量与投饵船的船体尺寸和明轮驱动力有关,c2为 当前船位置的横向偏移距离l的比例系数,c3为船速v的比例系数,计算延伸距离x时通过引 入横向偏移距离l和当前船优化路径跟踪修正轨迹。
[0029]
进一步,所述路径切换时转弯控制方法如下:
[0030]
以当前路径的终点t
k 1
(即下一路径的起点)为圆心,做2个同心圆o1、o2,半径分别 为r1、r2,其中r1《r2,r1、r2与投饵船的船体尺寸和明轮驱动力有关。
[0031]
当当前位置pk在当前跟踪直线路径上的正投影点h进入圆o2时,投饵船开始线性减速; 当点h进入圆o2时,开始使用跟踪圆弧控制方法跟踪圆弧段路径,并切换当前直线路径;当 点h出圆o1时,转弯结束,切换直线路径跟踪方法,并投饵船开始线性加速;当点h出圆o2结 束线性加速。当船速改变时,改变下料流量保证均匀投饵。
[0032]
进一步,所述跟踪圆弧控制方法如下:
[0033]
转弯时作业路径为1/4圆弧,其半径为r1,与两直线路径相切。当投饵船的当前位置pk偏 离圆弧路径时,连接圆弧圆心o与当前位置pk并向前延伸至圆弧上点n,从点n沿圆弧向 前延伸一段距离(该距离与船体尺寸和明轮驱动力有关)记为点k,将点k作为实时跟踪 目标点进行实时动态跟踪。
[0034]
本发明的有益效果为:针对水产养殖池塘轮廓不规则、大小不确定,以及单抛盘投饵饵 料密度不均匀、密度中心偏移以及投饵船路径跟踪精度不高等问题,使用本发明能有效自适 应水产养殖池塘轮廓和大小,调整投饵范围。通过控制船速、下料速度以及采用实时动态插 点路径跟踪控制算法跟踪规划的正逆回字形作业路径可以实现在给定投饵区域内实现均匀 投饵。
附图说明
[0035]
图1单抛盘机械机构图
[0036]
图2饵料分布示意图
[0037]
图3纵向饵料密度曲线示意图
[0038]
图4投饵船后视图
[0039]
图5当前位置pk与gps/bd关系图
[0040]
图6饵量叠加示意图
[0041]
图7作业路径规划示意图
[0042]
图8实时动态插点路径跟踪控制算法示意图
具体实施方式
[0043]
下面结合附图对本发明的具体实施方式做进一步描述,本实施方式以本发明技术方案为 前提进行实施,给出了详细的实施方式和具体的操作过程,但本发明的保护范围不限于下述 的实施方式。
[0044]
本实施方式采用的投饵船的结构如图4、图5所示,船上包括船体、明轮单抛盘、以及 gps/bd导航系统。
[0045]
具体实施步骤如下:
[0046]
step1:通过实验、拟合得到单抛盘投饵时纵向饵量密度曲线ω=f(x),计算所需物理 量,存表待查。
[0047]
(a):通过多次实验,拟合得到单抛盘在不同转速nk时所对应的纵向饵量密度曲线 ω=fk(x)。
[0048]
(b):由密度曲线fk(x)确定密度为密度峰值1/2时对应的两个横坐标x
1(k)
和x
2(k)
,由下 式计算所需投饵船作业路径之间距离d
1(k)
、d
2(k)
。
[0049]
其中d
1(k)
《d
2(k)
。
[0050]
(c):测得饵料密度中心mk在纵中线上的正投影点pk距抛盘的距离lk。
[0051]
(d):将上述多次实验建立的nk、d
1(k)
、d
2(k)
和lk按条目存表待查。
[0052]
step2:计算单位区域内投饵量。
[0053]
使用船载gps/bd导航系统测得目标作业区边界处各个角点经纬度坐标并将其转化为 平面坐标,确定投饵作业边界,并计算需均匀投饵区域的面积s,使用称重传感器测取饵量 总重量q,计算单位区域内投饵量。
[0054]
step3:规划正逆回字形投饵船作业路径。
[0055]
(a):通过gps/bd导航系统确定矩形作业区域四个顶点,顺时针依次为a(x1,y1)、b(x2,y2)、c(x3,y3)、d(x4,y4);
[0056]
(b):从abcd边界向内确定有效均匀投饵边界a1b1c1d1,其与abcd的距离等于抛盘最 大转速时纵向密度峰值1/2处距饵料外边界的距离;
[0057]
(c):首先,从step1建立的条目表中选取单向最大作业路径间距d
1(k)
d
2(k)
,向上取 整计算单向回字形作业路径的圈数(假设有效均匀投饵区域a1b1c1d1的窄 边长为x)。然后,由确定实际所需的单向作业路径间距d
1(k)
d
2(k)
。最后,根据所确定 的d
1(k)
d
2(k)
,从step1建立的条目表中选取实际需要的d
1(k)
、d
2(k)
及其对应的抛盘转速nk;
[0058]
(d):从距a1b1c1d1的长边处开始规划作业路径,正逆回字形路径最外圈距 a1b1c1d1边界距离,同圈正逆作业路径之间的距离为d1,以此得到作业路径t0→
t1→ꢀ
t2→…→
tk→
t
k 1
…→
t
n-1
→
tn,其中t0为起始点,tn为投饵路径终点,t
k 1
为正逆回 字形路径的转换点。
[0059]
step4:确定当前位置pk(x,y)与gps/bd天线g(x0,y0)之间的关系。
[0060][0061]
其中为投饵船控制系统测得的当前航向角,lk已在step1中测得。将pk作为投饵船跟 踪作业路径的当前位置,以它与规划作业路径的偏移量作为投饵船与规划路径的偏移量。
[0062]
step5:通过如图7所示实时动态插点路径跟踪控制算法跟踪正逆回字形作业路径
投饵 作业。
[0063]
当跟踪直线路径时,使用如下方法:
[0064]
(a):由投饵船的当前位置pk获得其在当前所跟踪直线路径上的正投影点h。
[0065]
(b):将h点沿当前跟踪路径向前延伸x长度记为点e,将e作为实时跟踪目标点,对点e进 行实时跟踪。
[0066]
(c):不停重复上述(a)和(b),以达到实时动态地跟踪当前规划直线路径的效果。
[0067]
上述实时跟踪目标点的方法如下,通过gps/bd测取当前船速v,计算实时跟踪目标点e 的延伸距离x=c
1-c2l c3v,其中c1为常量与投饵船的船体尺寸和明轮驱动力有关,c2为 当前船位置的横向偏移距离l的比例系数,c3为船速v的比例系数,计算延伸距离x时通过引 入横向偏移距离l和当前船优化路径跟踪修正轨迹。
[0068]
当路径切换时,使用如下转弯控制方法:
[0069]
以当前路径的终点t
k 1
(即下一路径的起点)为圆心,做2个同心圆o1、o2,半径分别 为r1、r2,其中r1《r2,r1、r2与投饵船的船体尺寸和明轮驱动力有关。
[0070]
当当前位置pk在当前跟踪直线路径上的正投影点h进入圆o2时,投饵船开始线性减速; 当点h进入圆o2时,开始使用跟踪圆弧控制方法跟踪圆弧段路径,并切换当前直线路径;当 点h出圆o1时,转弯结束,切换直线路径跟踪方法,并投饵船开始线性加速;当点h出圆o2结 束线性加速。当船速改变时,改变下料流量保证均匀投饵。
[0071]
其中跟踪圆弧控制方法如下:
[0072]
转弯时作业路径为1/4圆弧,其半径为r1,与两直线路径相切。当投饵船的当前位置pk偏 离圆弧路径时,连接圆弧圆心o与当前位置pk并向前延伸至圆弧上点n,从点n沿圆弧向 前延伸一段距离(该距离与船体尺寸和明轮驱动力有关)记为点k,将点k作为实时跟踪 目标点进行实时动态跟踪。
[0073]
综上,本发明的一种基于单抛盘模型的全自动投饵船均匀投饵的控制方法,用于实现水 产养殖的均匀投饵。首先,通过实验、拟合得到单抛盘投饵时纵向饵量密度曲线,计算路径 规划所需物理量,按条目存表待查。其次,计算单位区域内投饵量。接着,规划正逆回字形 投饵船作业路径。然后,确定gps/bd天线和当前位置pk之间的关系。最后,使用实时动态 插点路径跟踪控制算法跟踪作业路径进行投饵作业。本发明操作简单,可有效解决单抛盘投 饵不均匀问题,进而提高水产养殖质量,促进水产养殖业的智能化发展。
[0074]
在本说明书的描述中,参考术语“一个实施例”、“一些实施例”、“示意性实施例”、“示 例”、“具体示例”、或“一些示例”等的描述意指结合该实施例或示例描述的具体特征、结构、 材料或者特点包含于本发明的至少一个实施例或示例中。在本说明书中,对上述术语的示意 性表述不一定指的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可 以在任何的一个或多个实施例或示例中以合适的方式结合。
[0075]
尽管已经示出和描述了本发明的实施例,本领域的普通技术人员可以理解:在不脱离本 发明的原理和宗旨的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的 范围由权利要求及其等同物限定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。