1.本技术涉及自动门领域,尤其涉及一种自动门的控制装置。
背景技术:
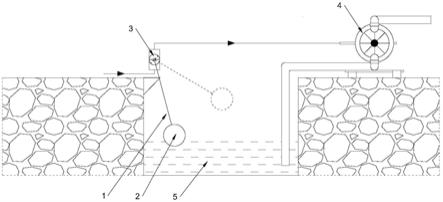
2.在机器人运输过程中,通常会遇到自动门,因此,需要控制自动门在机器人靠近时打开,让机器人快速稳定的通过,并在机器人通过后自动关闭自动门。
3.然而,现有的红外感应式自动门无法检测到机器人,当机器人靠近时,自动门不会自动打开。微波雷达式自动门虽然能够检测到机器人,但是,对机器人的移动速度和尺寸(例如高度)均有一定的限制。此外,在一些特殊场合,例如,医院、实验室等,通常需要工作人员刷门禁卡或指纹等方式才能开门,以便机器人通过,如此,既浪费了人力,又降低了机器人的工作效率,无法体现机器人的智能性。
技术实现要素:
4.本技术实施例提供了一种自动门的控制装置,节约了人力,提高了机器人的工作效率,体现了机器人与自动门交互的智能性。
5.本实施例还提供了一种自动门的控制装置,包括接收模块、解码模块和控制模块。
6.其中,接收模块用于接收机器人控制系统发送的开门信息,开门信息包含机器人发送的实时位置信息;解码模块连接接收模块,用于比较开门信息中包含的机器人位置与自动门的预设位置是否匹配。若匹配,则解码模块向控制模块输出控制指令,若不匹配,则解码模块保持原有工作状态。
7.其中,控制模块包括时基电路和继电器电路。控制模块连接解码模块,用于在机器人位置与自动门的预设位置匹配时导通自动门打开;时基电路的输入端与解码模块的输出端连接,时基电路用于延迟电平变化且保持电路稳定;继电器电路的输入端与时基电路的输出端连接。
8.在一实施例中,一种自动门的控制装置还包括电源模块,电源模块用于兼容交流电或直流电的输入,输出直流电,给接收模块、解码模块和控制模块供电。
9.其中,电源模块的输入端用于输入交流电或直流电,电源模块的输出端分别连接接收模块、解码模块和控制模块。
10.在一实施例中,接收模块包括接收天线和无线信号接收芯片。
11.其中,接收天线用于接收机器人发出的开门信息;无线信号接收芯片的无线信号接收端连接接收天线,无线信号接收芯片的数据输出端连接解码模块的数据输入端,无线信号接收芯片的电源输入端连接电源模块。
12.在一实施例中,接收模块还包括第一电阻和第一稳压单元。
13.其中,第一电阻的一端连接电源模块,第一电阻的另一端连接无线信号接收芯片的数据输出端;第一稳压单元的一端接地,第一稳压单元的另一端连接无线信号接收芯片的电源输入端。
14.在一实施例中,解码模块包括拨码器和主控芯片。
15.其中,拨码器用于设定自动门的编码;主控芯片的编码信号输入端分别与拨码器的输出端连接,主控芯片的控制指令输出端与控制模块的输入端连接,主控芯片的数据输入端与接收模块的数据输出端连接。
16.在一实施例中,拨码器包括拨码开关和拨码电阻。
17.其中,拨码开关有两个,每个拨码开关包括四个输出端,拨码开关的输出端共8个,每个输出端有两种输出状态,拨码开关的输出端分别与主控芯片对应的编码信号输入端连接。
18.其中,拨码电阻共8个,拨码电阻的一端分别与拨码开关的输出端对应连接,8个拨码电阻的另一端并接,且与电源模块连接。
19.在一实施例中,时基电路包括第一控制开关单元、时基电路芯片、充电电容和第二电阻。
20.其中,第一控制开关单元的一端与解码模块的输出端连接;时基电路芯片的输出端与继电器电路的输入端连接,时基电路芯片的触发端与第一控制开关单元连接;充电电容的一端接地,充电电容的另一端连接时基电路芯片的阈值端。
21.其中,第二电阻用于保护时基电路,避免充电电流过大,第二电阻的一端连接电源模块,第二电阻的另一端分别连接充电电容、时基电路芯片的阈值端和时基电路芯片的放电端。
22.在另一实施例中,时基电路包括第二控制开关单元、延迟单元和第三控制开关单元。
23.第二控制开关单元的一端与解码模块的输出端连接;延迟单元用于延迟电路中电平变化,延迟单元的一端连接电源模块,延迟单元的另一端接地;第三控制开关单元的一端与第二控制开关单元中的集电极连接。
24.在一实施例中,第三控制开关单元包括限流电阻和第三控制开关。
25.其中,限流电阻的第一端连接第二控制开关单元的集电极;第三控制开关的栅极连接限流电阻的第二端,第三控制开关的源极连接电源模块,第三控制开关的漏极连接继电器电路的输入端。
26.在一实施例中,继电器电路包括第四控制开关单元、二极管和继电器线圈。
27.其中,第四控制开关单元包括第四控制开关、限流电阻和截止电阻,第四控制开关单元的第一端与时基电路的输出端连接,第四控制开关单元的第二端接地。
28.其中,二极管的一端连接电源模块,二极管的另一端连接第四控制开关的集电极;继电器线圈并联在二极管的两端,继电器线圈用于在通电时吸合,控制自动门打开。
29.上述实施例提供的技术方案,机器人控制系统发送的开门信号由接收模块接收后解析成数据信号输送给解码模块匹配,解码模块匹配后向控制模块传输控制指令,节约了人力,提高了机器人的工作效率。
附图说明
30.为了更清楚地说明本技术实施例的技术方案,下面将对本技术实施例中所需要使用的附图作简单地介绍。
31.图1为本技术一实施例提供的一种自动门的控制装置的结构示意图。
32.图2为本技术一实施例提供的一种自动门的控制装置的结构示意图。
33.图3为本技术一实施例提供的一种自动门的控制装置中电源模块40的电路结构图。
34.图4为本技术一实施例提供的一种自动门的控制装置中接收模块10的电路结构图。
35.图5为本技术一实施例提供的一种自动门的控制装置中解码模块20的电路结构图。
36.图6为本技术一实施例提供的一种控制模块30中的时基电路31的电路结构图。
37.图7为本技术另一实施例提供的一种控制模块30中的时基电路32的电路结构图。
38.图8为本技术一实施例提供的一种控制模块30中的继电器电路33的电路结构图。
39.图9为本技术一实施例提供的一种自动门的控制装置中板子连接器p1的电路结构图。
具体实施方式
40.下面将结合本技术实施例中的附图,对本技术实施例中的技术方案进行描述。
41.相似的标号和字母在下面的附图中表示类似项,因此,一旦某一项在一个附图中被定义,则在随后的附图中不需要对其进行进一步定义和解释。同时,在本技术的描述中,术语“第一”、“第二”等仅用于区分描述,而不能理解为指示或暗示相对重要性。
42.图1为本技术一实施例提供的一种自动门的控制装置的结构示意图。如图1所示,本技术实施例提供了一种自动门的控制装置,该控制装置包括:接收模块10、解码模块20、控制模块30。
43.其中,接收模块10用于接收机器人控制系统发送的开门信息,将其转换为数字信号,并通过数据线输送给解码模块20,解码模块20用于比较开门信息中包含的机器人位置与自动门的预设位置是否匹配,解码模块20的输入端与接收模块10的输出端电连接;控制模块30用于在机器人实时位置与自动门的预设位置匹配时导通自动门打开,控制模块30的输入端与解码模块20的输出端电连接。
44.其中,控制模块30包括时基电路31和继电器电路33,时基电路31的输入端与解码模块20的输出端连接,时基电路31用于延迟电平变化且保持电路稳定,继电器电路33的输入端与时基电路31的输出端连接。
45.在机器人运动至自动门的附近区域时,机器人的控制系统判断机器人已走到自动门附近区域,并向自动门的控制装置中的接收模块10发送开门信息,开门信息中包含机器人的实时位置信息,接收模块10接收到开门信息后,将其转换为数字信号,然后通过数据线传输给解码模块20,解码模块20内存有对应的自动门的预设位置的所有位置信息,当机器人发送的开门信息与解码模块20存储的位置信息匹配时,解码模块20向控制模块30中的时基电路31输出高电平,时基电路31根据自身结构不同特性导通、对应输出高电平至继电器电路33且延迟一段时间,用以保持电路的稳定,同时继电器电路33接收高电平导通使自动门打开。
46.同样的,当机器人未到预设位置或离开预设位置时,机器人控制系统发送的开门
信息与解码模块20内存有的预设位置信息不匹配,或机器人控制系统判断机器人不在预设位置不发出信号,解码模块20输出低电平至控制模块30中的时基电路31,时基电路31不导通因此输出低电平至继电器电路33,继电器电路33同样不导通,自动门关闭。
47.另外,若时基电路31的输入端由高电平变为低电平,或由低电平变为高电平时,时基电路31的自身结构特性可以使这种变化延迟一段时间后输出,保持了一定时间内电路的稳定性。
48.图2为本技术一实施例提供的一种自动门的控制装置的结构示意图,如图2所示,电源模块40用于供电给接收模块10、解码模块20和控制模块30,电源模块40的输出端连接自动门的控制装置中的接收模块10、解码模块20和控制模块30。
49.图3为本技术一实施例提供的一种自动门的控制装置中电源模块40的电路结构图。如图3所示,电源模块40中包括整流桥bd1、瞬态电压抑制二极管d3、电源管理芯片u5。
50.其中,整流桥bd1的输入端1和整流桥bd1的输入端2分别连接交流电的火线端ac_l与交流电的零线端ac_n,整流桥bd1用于将交流电输入变为直流电,实现兼容交、直流的电源输入。
51.电源管理芯片u5用于控制导通时间和负载调整,具有安全输入电压范围宽的特点,电源管理芯片u5的电源输入端vin电连接至整流桥bd1的输出端口3与瞬态电压抑制二极管d3的第一端,整流桥bd1的输出端口4与瞬态电压抑制二极管d3的第二端接地。
52.瞬态电压抑制二极管d3的两端并联在整流桥bd1的输出端口3、4,用于保护电路中电器设备,使其不被导线引入的电压尖峰破坏。
53.图4为本技术实施例提供的一种自动门的控制装置中接收模块10的结构示意图,如图4所示,接收模块10包括接收天线、无线信号接收芯片u1、第一电阻r14和第一稳压单元11。接收天线用于接收机器人控制系统发出开门信息的数据信号。
54.于一实施例中,该数据信号包括的信息可以是机器人的实时位置,也可以是机器人实时所在区域对应自动门的编码信息。
55.无线信号接收芯片u1用于处理接收到的数据信号,将其转换为数字信号。其中,无线信号接收端ant与接收天线电连接;接地端gnd接地;第一数据输出端data2与第二数据输出端data3电性连接,并在连接共点处以数据线data连接至解码模块20,用以将无线信号接收芯片u1所转换的数字信号输出至解码模块20。
56.无线信号接收芯片u1的电源输入端vcc连接至电源模块40,于一实施例中,电源模块所提供的电源可以为5v电压。第一电阻r14的第一端连接5v的电源模块40,第一电阻r14的第二端连接在数据线data上。第一稳压单元11包括电容c3和电容c4,第一稳压单元11用以给无线信号接收芯片u1提供稳定电压,电容c3和电容c4并联的一端连接至无线信号接收芯片u1的电源输入端vcc,电容c3和电容c4并联的另一端接地。
57.图5为本技术实施例提供的一种自动门的控制装置中解码模块20的电路结构示意图,如图5所示,解码模块20包括拨码器22、电阻r9
‑
r11、二极管led1、主控芯片u2和第二稳压单元21。
58.拨码器22用于设定自动门的编码,其中,拨码器22包括第一拨码开关s1、第二拨码开关s2和拨码电阻r1
‑
r8。第一拨码开关s1及第二拨码开关s2分别用于设定自动门的编码(或房间编码)。第一拨码开关s1包括四个输出端a0
‑
a3,第二拨码开关s2包括四个输出端
a4
‑
a7,每个输出端有两种输出状态(高电平和低电平),则其能够输出256种编码。拨码开关的输出端a0
‑
a7分别与主控芯片对应的编码信号输入端a0
‑
a7连接。
59.第一拨码开关s1、第二拨码开关s2的各输出端a0
‑
a7分别连接各自对应的拨码电阻r1
‑
r8的第一端,例如输出端a0连接至拨码电阻r1,其余输出端如图5所示,以此类推;两个拨码开关s1、s2的公共端com接地,拨码电阻r1
‑
r8的第二端并联且连接至电源模块40,于一实施例中,电源模块40所提供的电源可以为5v电压。
60.主控芯片u2的数据输入端din与接收模块10的数据线data电性连接,用以接收无线信号接收芯片u1所传送的数字信号。主控芯片u2的电源输入端vcc连接至电源模块40,于一实施例中,电源模块40所提供的电源可以为5v电压。第二稳压单元21包括电容c1和电容c2,用以提供稳定电压至主控芯片u2,电容c1和电容c2并联的一端连接至主控芯片u2的电源输入端vcc,电容c1和电容c2并联的另一端接地。
61.主控芯片u2的端口osc1和osc2串联电阻r10,通过连接的电阻r10的阻值确定频率,用于保证主控芯片u2正确解码。解码模块20中的主控芯片u2接收到来自无线信号接收芯片u1输出的数据信号,并对数据信号进行解析,若解析得到的数据信号中包含的编码信息与拨码器22预设的自动门编码匹配,则主控芯片u2通过控制指令输出端d0向控制模块30输出控制指令。
62.主控芯片u2的端口vt连接电阻r9的第一端,电阻r9的第二端连接二极管led1的第一端,二极管led1的第二端接地,二极管led1具有提示作用,当解析得到的编码信息与拨码器22预设的自动门编码匹配时,主控芯片u2的端口vt输出高电平,构成回路,二极管led1发亮。
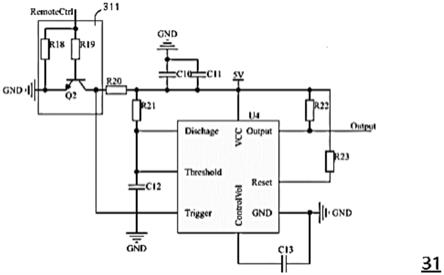
63.控制模块30包括继电器电路33和时基电路31,图6为本技术一实施例提供的一种控制模块30中的时基电路31的电路结构图。时基电路31用于延迟电路中的电平变化,使继电器电路33驱动自动门打开时保持稳定,时基电路31的输入端与解码模块20中主控芯片u2的输出端d0连接。
64.时基电路31包括:第一控制开关单元311、时基电路主控芯片u4、充电电容c12以及第二电阻r21。
65.第一控制开关单元311用于作为控制开关,包括截止电阻r18、限流电阻r19和第一控制开关q2。截止电阻r18的第一端接地,截止电阻r18的第二端连接解码模块20的输出端d0,用于使第一控制开关q2截止。限流电阻r19用于限流,限流电阻r19的第一端连接第一控制开关q2的基极,限流电阻r19的第二端连接解码模块20的输出端d0,降低第一控制开关q2的功耗。
66.于一实施例中,第一控制开关q2为npn型三极管。
67.第二电阻r21以及充电电容c12串联连接,用以充放电,第二电阻r21和充电电容c12的连接端电性连接,且连接时基电路芯片u4。时基电路芯片u4内的比较器检测充电电容c12上的电压,以确定输出电平的高低和控制开关的通断,并形成延时电路,时基电路31具有一定的输出功率,可以直接驱动继电器等负载。
68.当接收到无线信号后,时基电路芯片u4的输出端output可实现持续1s的高电平来驱动继电器电路33,保证了继电器电路33的稳定性。
69.解码模块20针对机器人发送的开门信息和第一拨码开关s1及第二拨码开关s2预
设的自动门位置进行匹配。若匹配失败或未接收到无线信号,则解码模块20中主控芯片u2的控制指令输出端d0输出低电平,控制开关单元311不导通,即时基电路芯片u4的触发端trigger输入高电平,时基电路芯片u4的输出端output输出低电平,电路处于稳定状态。
70.若匹配成功,则解码模块20主控芯片u2的控制指令输出端d0发出高电平,接收到无线信号后,时基电路芯片u4的触发端trigger输入负向脉冲,时基电路芯片u4的输出端output输出高电平,电路处于暂稳定状态,定时开始。定时持续时间公式为t=1.1*r21*c12。
71.当电路处于暂稳定状态时,电流通过第二电阻r21对充电电容c12进行充电,当电容电压达到阈值时,电容充电结束,时基电路芯片u4的输出端output输出低电平。当接收到无线信号后,充电电容放电,持续输出1s的高电平来继续驱动继电器电路,以确保继电器电路33的稳定性。
72.图7为本技术另一实施例提供的控制模块30中的时基电路32的电路结构图。如图7所示,时基电路32包括:第二控制开关单元321、延迟单元323以及第三控制开关单元322。
73.第二控制开关单元321的一端与解码模块20的控制指令输出端d0连接,第二控制开关单元321用于作为控制开关,包括:第二控制开关q2、限流电阻r19、截止电阻r22。
74.于一实施例中,第二控制开关q2可以为bjt晶体管。
75.延迟单元323包括延迟电阻r18和延迟电容c12。延迟电阻r18串联延迟电容c12,用于延迟电路中电平变化,延迟单元323的第一端连接电源模块,延迟单元323的第二端接地。
76.第三控制开关单元322包括:限流电阻r20以及第三控制开关q3,于一实施例中第三控制开关q3可以是pmos晶体管,限流电阻r20电性连接第三控制开关q3,限流电阻r20的第一端连接延迟电阻r18与延迟电容c12的串联连接端,限流电阻r20的第二端连接第三控制开关q3的栅极;第三控制开关q3用以作为控制开关,第三控制开关q3的源极连接电源模块,第三控制开关q3的漏极连接继电器电路33的输入端output。
77.于一实施例中,第三控制开关q3可以是pmos晶体管。
78.当来自解码模块20中主控芯片u2的控制指令输出端d0输出高电平时,第二控制开关q2导通,此时第三控制开关q3的栅极相当于直接接地,为低电平,而pmos管的特性为低电平导通,高电平断开,所以此时第三控制开关单元322导通,时基电路32的输出端output(即继电器电路33的输入端output)输出5v高电平,继电器电路33导通。
79.当来自解码模块20中主控芯片u2的控制指令输出端d0输出为低电平时,第二控制开关q2断开,此时第三控制开关q3的栅极相当于连接5v电压输入,为高电平,pmos管的特性为低电平导通,高电平断开,因此第三控制开关q3为断开状态,继电器电路33的输入端output为低电平,继电器电路33不导通。由于延迟单元323的延迟电阻r18和延迟电容c12的存在,使得在时基电路32的输入端remotectrl输入低电平时,时基电路32的延迟电容c12继续放电,放电时长为1s,放电时长内使第二控制开关q2保持为导通状态,pmos管的栅极仍然接地为低电平,所以pmos管仍然导通,因此时基电路32的输入端remotectrl为低电平时,时基电路32的输出端output变为低电平的时间延迟且缓慢,所以在来自解码模块20的信号不稳定时,时基电路32使得继电器电路33的开合较为稳定。
80.图8为本技术一实施例提供的一种控制模块30中的继电器电路33的电路结构图。如图8所示,继电器电路33包括:第四控制开关单元331、二极管d1和继电器线圈k1。
81.第四控制开关单元331用作控制开关,包括:第四控制开关q1、限流电阻r12和截止电阻r13。限流电阻r12用于限流,降低第四控制开关q1功耗,截止电阻r13,用于使第四控制开关q1可靠截止。第四控制开关q1的基极连接限流电阻r12的一端,第四控制开关q1的发射极连接截止电阻r13的一端,限流电阻r12与截止电阻r13的另一端并接且连接时基电路31(或时基电路32)的输出端output。
82.于一实施例中,第四控制开关q1可以为npn型三极管。
83.第四控制开关单元331的第一端与时基电路31(或时基电路32)的输出端output连接,第四控制开关单元331的第二端接地;二极管d1的一端连接电源模块,二极管d1的另一端与第四控制开关q1的集电极连接;继电器线圈k1并联在二极管d1的两端,用于在通电时吸合,控制自动门打开。
84.二极管d1的负极连接电源模块,二极管d1的正极与第四控制开关单元331中第四控制开关q1的集电极连接。
85.于一实施例中,继电器线圈k1可以为单刀双掷继电器,继电器线圈k1并联在二极管d1的两端,用于在通电时吸合,控制自动门打开。
86.继电器线圈k1并联在所述二极管d1的两端,用于在通电时吸合,控制自动门打开。继电器电路33的输入端与时基电路31(或时基电路32)的输出端连接,当继电器电路33输入高电平时,第四控制开关单元331中的第四控制开关q1导通,继电器线圈k1通电,触点吸合,自动门打开。
87.继电器电路33输入低电平或电路不导通时,二极管d1反向续流,为继电器线圈k1提供泄放通路,第四控制开关单元331中的第四控制开关q1不导通,继电器线圈k1断电,自动门关闭。
88.图9为本技术实施例提供的一种自动门的控制装置的板子连接器p1的电路结构图。板子连接器p1的端口ac_l连接电源模块40中的整流桥bd1的端口ac_l,板子连接器p1的端口ac_n连接电源模块40中的整流桥bd1的端口ac_n,板子连接器p1的端口vin、vout分别与继电器电路33中的继电器线圈k1的端口vin、vout连接。
89.上述装置中各个模块的功能和作用的实现过程具体详见上述基于一种自动门的控制装置中对应步骤的实现过程,在此不再赘述。
90.在本文中,诸如第一和第二等之类的关系术语仅仅用来将一个实体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些实体或操作之间存在任何这种实际的关系或者顺序。
91.另外,在本技术各个实施例中的各功能模块可以集成在一起形成一个独立的部分,也可以是各个模块单独存在,也可以两个或两个以上模块集成形成一个独立的部分。
92.以上所述仅为本技术的实施例而已,并不用于限制本技术的保护范围,对于本领域的技术人员来说,本技术可以有各种更改和变化。凡在本技术的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本技术的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。