技术特征:
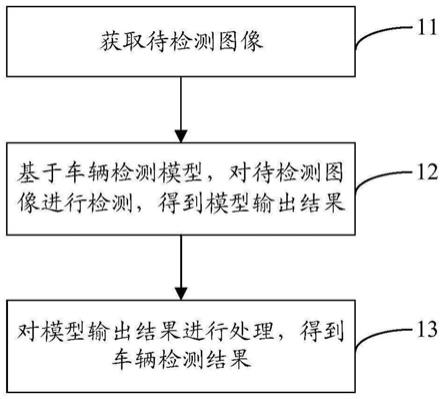
1.一种车辆检测方法,其特征在于,包括:获取待检测图像,所述待检测图像包括待检测车辆;基于车辆检测模型,对所述待检测图像进行检测,得到模型输出结果,所述车辆检测模型是基于训练数据训练的,所述训练数据包括多张样本图像以及与所述样本图像中车辆对应的倾斜角度标签,所述车辆检测模型的损失值包括角度损失,所述角度损失为角度标签编码值与所述车辆检测模型输出的车辆的角度估计值的损失,所述角度标签编码值由基于预设编码角度间隔对所述倾斜角度标签编码得到,且所述角度损失的权重跟随所述车辆检测模型的训练情况自适应调整;对所述模型输出结果进行处理,得到车辆检测结果,所述车辆检测结果包括所述待检测车辆的倾斜角度。2.根据权利要求1所述的车辆检测方法,其特征在于,所述训练数据还包括与所述样本图像对应的位置标签,所述车辆检测模型的损失值包括位置损失与角度损失,所述方法包括:从所述训练数据中选择一张所述样本图像并输入所述车辆检测模型,得到训练检测结果,所述训练检测结果包括所述角度估计值与位置估计值;计算所述位置标签与所述位置估计值之间的损失,得到位置损失;计算所述角度标签编码值与所述角度估计值之间的损失,得到角度损失;基于所述角度损失与所述位置损失,计算出当前损失值;判断所述车辆检测模型是否满足预设训练结束条件;若否,则返回所述从所述训练数据中选择一张所述样本图像并输入所述车辆检测模型的步骤,直至所述车辆检测模型满足所述预设训练结束条件。3.根据权利要求2所述的车辆检测方法,其特征在于,所述训练数据还包括与所述样本图像对应的类别标签,所述训练检测结果还包括目标类别估计值,所述基于所述角度损失与所述位置损失,计算出当前损失值的步骤,包括:计算所述类别标签与所述目标类别估计值之间的损失,得到类别损失;计算所述位置标签对应的目标框标签与所述位置估计值对应的预测框之间的损失,得到置信度损失;对所述角度损失、所述类别损失、所述位置损失以及所述置信度损失进行加权求和,得到所述当前损失值。4.根据权利要求3所述的车辆检测方法,其特征在于,所述方法还包括:判断所述车辆检测模型是否满足预设调整条件;若是,则将所述角度损失的权重设置为第一预设值;若否,则将所述角度损失的权重设置为第二预设值,所述第二预设值大于所述第一预设值。5.根据权利要求4所述的车辆检测方法,其特征在于,所述判断所述车辆检测模型是否满足预设调整条件的步骤,包括:判断当前训练次数是否达到预设次数,若是,则确定满足所述预设调整条件;或者判断当前训练时长是否达到预设时长,若是,则确定满足所述预设调整条件;或者判断所述位置损失与所述类别损失之和是否大于第三预设值,若是,则确定满足所述
预设调整条件。6.根据权利要求2所述的车辆检测方法,其特征在于,所述计算所述角度标签编码值与所述角度估计值之间的损失,得到角度损失的步骤之前,包括:基于预设最大倾斜角度与预设角度间隔,计算所述角度标签编码值;将所述倾斜角度标签与所述预设编码角度间隔相除,得到第一数值;采用二进制编码对所述第一数值进行编码,得到所述角度标签编码值。7.根据权利要求2所述的车辆检测方法,其特征在于,所述基于预设最大倾斜角度与预设角度间隔,计算角度标签编码值的步骤,包括:将所述预设最大倾斜角度与所述预设角度间隔相除,得到第二数值;对所述第二数值进行对数变换与取整处理,得到编码长度;基于所述编码长度与所述第二数值,得到所述预设编码角度间隔。8.根据权利要求1所述的车辆检测方法,其特征在于,所述模型输出结果包括第一角度检测值,所述对所述模型输出结果进行处理,得到车辆检测结果的步骤,包括:基于第四预设值,对所述第一角度检测值进行过滤处理,得到第二角度检测值;将所述第二角度检测值进行进制转换处理,得到第三角度检测值;将所述第三角度检测值与所述预设编码角度间隔相乘,得到所述待检测车辆的倾斜角度。9.根据权利要求8所述的车辆检测方法,其特征在于,所述基于第四预设值,对所述第一角度检测值进行过滤处理,得到第二角度检测值的步骤,包括:判断所述第一角度检测值中的每个数值是否大于所述第四预设值;若是,则将所述数值设置为第三数值;若否,则将所述数值设置为第四数值。10.根据权利要求1所述的车辆检测方法,其特征在于,所述车辆检测模型包括骨干模块、颈部模块以及检测头模块,所述骨干模块包括通道洗牌模块与空间金字塔池化模块,所述方法还包括:采用所述通道洗牌模块对所述样本图像进行特征提取处理,得到第一特征数据;采用所述空间金字塔池化模块对所述第一特征数据进行处理,得到第二特征数据;采用所述颈部模块对所述第二特征数据进行融合处理,得到第三特征数据;采用所述检测头模块对所述第三特征数据进行分类和回归处理,得到所述训练检测结果。11.一种车位检测方法,其特征在于,包括:获取目标监控场景中的待检测图像,所述待检测图像包括待检测车辆;基于车辆检测模型,对所述待检测图像进行检测,得到模型输出结果,所述车辆检测模型是基于训练数据训练的,所述训练数据包括多张样本图像以及与所述样本图像中车辆对应的倾斜角度标签,所述车辆检测模型的损失值包括角度损失,所述角度损失为角度标签编码值与所述车辆检测模型输出的车辆的角度估计值的损失,所述角度标签编码值由基于预设编码角度间隔对所述倾斜角度标签编码得到,且所述角度损失的权重跟随所述车辆检测模型的训练情况自适应调整;对所述模型输出结果进行处理,得到车辆检测结果,所述车辆检测结果包括所述待检
测车辆的倾斜角度;基于所述车辆检测结果与预设车位数据,得到车位空闲结果,所述车位空闲结果为所述目标监控场景中的车位是否被所述待检测车辆覆盖。12.根据权利要求11所述的车位检测方法,其特征在于,所述模型输出结果包括车辆预测框,所述预设车位数据包括车位区域,所述基于所述车辆检测结果与预设车位数据,得到车位空闲结果的步骤,包括:基于所述车辆预测框与所述车位区域,判定所述车位是否满足预设覆盖条件;若是,则所述车位空闲结果为所述车位被所述待检测车辆覆盖;若否,则所述车位空闲结果为所述车位未被所述待检测车辆覆盖。13.根据权利要求12所述的车位检测方法,其特征在于,所述基于所述车辆预测框与所述车位区域,判定所述车位是否满足预设覆盖条件的步骤,包括:判断所述车辆预测框的中心点是否落在所述车位区域内;若是,则确定所述车位满足所述预设覆盖条件;或者判断所述车辆预测框与所述车位区域的重合区域的面积是否大于预设面积;若是,则所述车位确定满足预设覆盖条件。14.一种检测装置,其特征在于,包括互相连接的存储器和处理器,其中,所述存储器用于存储计算机程序,所述计算机程序在被所述处理器执行时,用于实现权利要求1-10中任一项所述的车辆检测方法或权利要求11-13中任一项所述的车位检测方法。15.一种计算机可读存储介质,用于存储计算机程序,其特征在于,所述计算机程序在被处理器执行时,用于实现权利要求1-10中任一项所述的车辆检测方法或权利要求11-13中任一项所述的车位检测方法。
技术总结
本申请公开了一种检测方法、检测装置和计算机可读存储介质,该方法包括:获取待检测图像;基于车辆检测模型,对待检测图像进行检测,得到模型输出结果,车辆检测模型是基于训练数据训练的,训练数据包括多张样本图像以及与样本图像中车辆对应的倾斜角度标签,车辆检测模型的损失值包括角度损失,角度损失为角度标签编码值与车辆检测模型输出的车辆的角度估计值的损失,角度标签编码值由基于预设编码角度间隔对倾斜角度标签编码得到,且角度损失的权重跟随车辆检测模型的训练情况自适应调整;对模型输出结果进行处理,得到车辆检测结果,车辆检测结果包括待检测车辆的倾斜角度。通过上述方式,本申请能够提升车辆检测的精度。本申请能够提升车辆检测的精度。本申请能够提升车辆检测的精度。
技术研发人员:彭肖肖 王亚运 舒梅 王利升
受保护的技术使用者:浙江大华技术股份有限公司
技术研发日:2021.11.10
技术公布日:2022/3/21
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。