1.本实用新型涉及沉井掘进领域,进一步的,涉及一种基于双线激光的沉井掘进机导向系统,尤其涉及一种基于双线激光的沉井掘进机导向系统。
背景技术:
2.水下沉井掘进机是一种专用工程机械,其具有开挖水下岩土、排出泥水混合物、开挖轮廓检测控制、沉井深度及姿态检测等功能。
3.目前,大型涉水桥梁的桥墩多采用多仓沉井法构筑,其具有成本低、质量好等优点。作为沉井掘进机的眼睛,导向系统用于在掘进过程中指导掘进机调整姿态,以确保掘进作业的高效、高质完成,但是对于水下沉井掘进机一般工作的环境均在水下,而导向系统所采用的激光直接照射测量的方法不再适用,因此,对于水下作业,现阶段只能采用人工测量的方法对掘进机姿态和沉井姿态进行测量,该方法不仅测量精度差,而且费时费力、无法连续测量。
4.针对相关技术中水下掘进机的姿态测量过程繁琐、精度差、成本高的问题,目前尚未给出有效的解决方案。
5.由此,本发明人凭借多年从事相关行业的经验与实践,提出一种基于双线激光的沉井掘进机导向系统,以克服现有技术的缺陷。
技术实现要素:
6.本实用新型的目的在于提供一种基于双线激光的沉井掘进机导向系统,结构简单、操作方便,适用于水下环境,测量精度高,且节省人力物力,实现了沉井姿态的实时监测,有效解决了水下掘进机姿态测量无法精确化、自动化的难题。
7.本实用新型的目的可采用下列技术方案来实现:
8.本实用新型提供了一种基于双线激光的沉井掘进机导向系统,所述基于双线激光的沉井掘进机导向系统包括前置测量装置和导向管,其中:
9.所述前置测量装置包括激光靶和倾角仪,所述激光靶和所述倾角仪均设置于沉井内位于其底部的沉井管片的内壁上,所述激光靶的上方设置有激光发射器,所述激光靶位于所述导向管的内部,所述导向管延伸至液面上方且靠近所述激光发射器的位置,所述激光发射器所发射的激光光束穿过所述导向管的内部空间并射入所述激光靶。
10.在本实用新型的一较佳实施方式中,所述前置测量装置还包括第一安装支架,所述第一安装支架固定于所述沉井管片的内壁上,所述激光靶和所述倾角仪均设置于所述第一安装支架上。
11.在本实用新型的一较佳实施方式中,所述导向管的底端与所述第一安装支架密封连接,所述激光靶位于所述导向管的内部且靠近所述导向管的底端,所述导向管的顶端延伸至所述沉井的井口处且位于所述激光发射器的下方。
12.在本实用新型的一较佳实施方式中,所述第一安装支架沿水平方向安装,以使所
述激光发射器发射的激光光束沿竖直向下的方向射入所述激光靶。
13.在本实用新型的一较佳实施方式中,所述导向管的数量为多根,各所述导向管由下至上顺序且密封连接,各所述导向管与所述沉井管片的内壁之间连接有第二安装支架。
14.在本实用新型的一较佳实施方式中,所述倾角仪的x轴或者y轴朝向所述沉井管片的轴心方向。
15.在本实用新型的一较佳实施方式中,所述激光发射器的数量为至少两个。
16.在本实用新型的一较佳实施方式中,所述激光发射器为铅锤激光器。
17.在本实用新型的一较佳实施方式中,所述基于双线激光的沉井掘进机导向系统还包括上位机,所述激光靶的检测信号输出端和所述倾角仪的检测信号输出端分别与所述上位机的检测信号接收端连接。
18.在本实用新型的一较佳实施方式中,所述基于双线激光的沉井掘进机导向系统还包括电源,所述电源分别与所述激光靶的电源端、所述倾角仪的电源端和所述激光发射器的电源端连接。
19.由上所述,本实用新型的基于双线激光的沉井掘进机导向系统的特点及优点是:
20.在沉井内位于其底部的沉井管片的内壁上设置有激光靶和倾角仪,在沉井掘进过程中由井口位置不断对沉井管片拼接成环,并推动下方的沉井管片下移,倾角仪和激光靶可分别实时检测沉井管片的倾斜角度和垂直度,从而获得沉井的滚动角以及垂直度等姿态信息,实现沉井姿态的实时监测。
21.由于将激光靶设置于导向管的内部,导向管延伸至液面上方且靠近激光发射器的位置,使得激光发射器所发射的激光光束能够穿过导向管的内部空间并射入激光靶,即使在水下进行掘进作业,也能够通过激光发射器与激光靶相配合准确采集沉井的垂直度信息,解决了水下环境无法采用激光直接照射测量的难题,从而适用于水下环境的掘进作业,提高测量精度,无需工作人员下井测量,大大提高了水下掘进机姿态测量的精确度和自动化程度。
附图说明
22.以下附图仅旨在于对本实用新型做示意性说明和解释,并不限定本实用新型的范围。其中:
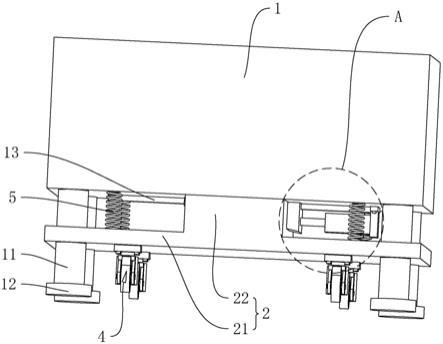
23.图1:为本实用新型基于双线激光的沉井掘进机导向系统的安装位置示意图。
24.图2:为本实用新型基于双线激光的沉井掘进机导向系统中前置测量装置的结构示意图。
25.图3:为本实用新型基于双线激光的沉井掘进机导向系统的控制结构框图。
26.本实用新型中的附图标号为:
27.1、前置测量装置;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
101、激光靶;
28.102、倾角仪;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
103、第一安装支架;
29.1031、第一安装板;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
1032、第二安装板;
30.2、激光发射器;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
3、导向管;
31.4、第二安装支架;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
5、沉井管片;
32.6、上位机;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
7、电源。
具体实施方式
33.为了对本实用新型的技术特征、目的和效果有更加清楚的理解,现对照附图说明本实用新型的具体实施方式。
34.如图1、图2所示,本实用新型提供了一种基于双线激光的沉井掘进机导向系统,该基于双线激光的沉井掘进机导向系统包括前置测量装置1和导向管3,其中:前置测量装置1包括激光靶101和倾角仪102,激光靶101和倾角仪102均固定设置于沉井内位于其底部的沉井管片5(即:由下至上方向上第一节沉井管片5)的内壁上,激光靶101的上方设置有激光发射器2,激光靶101位于导向管3的内部,导向管3向上延伸至液面上方且靠近激光发射器2底部的位置,激光发射器2所发射的激光光束由导向管3的顶端开口处射入导向管3的内部空间中,再穿过导向管3的内部空间射入激光靶101。
35.在沉井掘进过程中,由井口位置不断对沉井管片5拼接成环,并推动位于井口下方的沉井管片5下移,在此过程中,倾角仪102可实时检测沉井管片5的倾斜角度,同时激光靶101可实时检测沉井管片5的垂直度,从而获得沉井的滚动角以及垂直度等姿态信息,达到沉井姿态的实时监测的目的。另外,由于将激光靶101设置于导向管3的内部,导向管3延伸至液面上方且靠近激光发射器2的位置,使得激光发射器2所发射的激光光束能够穿过导向管3的内部空间并射入激光靶101,导向管3不仅将激光靶101与沉井中的水相隔离,而且为激光射入水中提供了通道,即使在水下进行掘进作业,也能够确保激光发射器2与激光靶101相配合准确采集沉井的垂直度信息,解决了水下环境无法采用激光直接照射测量的难题,从而适用于水下环境的掘进作业,提高测量精度,整个测量过程完全无需工作人员下井作业,大大提高了水下掘进机姿态测量的精确度和自动化程度。
36.进一步的,激光发射器2可为但不限于铅锤激光器。
37.进一步的,倾角仪102的x轴或者y轴朝向沉井管片5的轴心方向;激光发射器2的数量为至少两个,激光靶101可同时对多个激光发射器2所发射的激光光束进行接收,以提高监测数据的准确度。
38.在本实用新型的一个可选实施例中,如图2所示,前置测量装置1还包括第一安装支架103,第一安装支架103固定于沉井管片5的内壁上,激光靶101和倾角仪102均设置于第一安装支架103上。通过第一安装支架103的设置,保证激光靶101和倾角仪102在沉井内具有良好的稳定性。
39.进一步的,如图2所示,导向管3沿竖直方向设置,导向管3的底端与第一安装支架103密封连接,激光靶101位于导向管3的内部且靠近导向管3的底端,导向管3的顶端延伸至沉井的井口处且位于激光发射器2的下方,以使激光发射器2发射的激光光束能够穿过导向管3的内部空间并顺利射入激光靶101。通过导向管3的设置以及导向管3与第一安装支架103之间的密封连接关系,能够防止沉井中的水流入至导向管3内,保证激光靶101能够顺利接收激光发射器2所发射的激光光束,从而保证测量数据的精准度。
40.进一步的,第一安装支架103沿水平方向安装,激光靶101的靶面朝向正上方,以使激光发射器2发射的激光光束沿竖直向下的方向射入激光靶101。
41.具体的,如图2所示,第一安装支架103包括第一安装板1031和第二安装板1032,第一安装板1031沿水平方向设置,第二安装板1032沿竖直方向设置,第二安装板1032的一侧壁固定于沉井管片5的内壁上,第一安装板1031的一端与所述第二安装板1032的另一相对
侧壁的中间位置连接,第一安装板1031另一端向沉井管片5的轴心方向延伸。激光靶101和倾角仪102分别固定安装于第一安装板1031的顶部,导向管3的底端与第一安装板1031的顶部密封连接。
42.进一步的,第一安装板1031与第二安装板1032之间可为但不限于焊接或者一体成型。
43.在本实用新型的一个可选实施例中,如图1所示,导向管3的数量为多根,各导向管3由下至上顺序且密封连接,各导向管3与沉井管片5的内壁之间连接有第二安装支架4,从而提高各导向管3连接的稳定性,使各导向管3与沉井管片5之间的相对位置固定。
44.在本实用新型的一个可选实施例中,如图3所示,基于双线激光的沉井掘进机导向系统还包括上位机6,上位机6设置于地面上的控制室内,激光靶101的检测信号输出端和倾角仪102的检测信号输出端分别与上位机6的检测信号接收端连接,激光靶101和倾角仪102分别将各自检测到的数据传输至上位机6,上位机6即可获得沉井的滚动角以及垂直度等姿态信息,从而达到对沉井姿态实时监测的目的。
45.进一步的,激光靶101可通过但不限于tcp/ip协议将数据传输给上位机6,倾角仪102可通过但不限于rs485协议将数据传输给上位机6。
46.在本实用新型的一个可选实施例中,如图3所示,基于双线激光的沉井掘进机导向系统还包括电源7,电源7分别与激光靶101的电源端、倾角仪102的电源端和激光发射器2的电源端连接,通过电源7为激光靶101、倾角仪102和激光发射器2进行供电,保证设备的正常工作。
47.本实用新型的工作原理为:通过第一安装支架103将倾角仪102和激光靶101固定安装于由下至上方向上第一节沉井管片5的内壁上,在激光靶101的上方位于井口的位置上设置激光发射器2,在激光靶101的外侧设置导向管3,导向管3的顶端延伸至激光发射器2的下方且靠近激光发射器2的位置,以防止沉井内的水进入导向管3内。在沉井掘进过程中,由井口位置不断对沉井管片5拼接成环,并推动位于井口下方的沉井管片5下移,在此过程中,倾角仪102可实时检测沉井管片5的倾斜角度,同时激光发射器2所发射的激光光束穿过导向管3的内部空间并射入激光靶101,实时检测沉井管片5的垂直度,倾角仪102和激光靶101将检测到的数据传输至上位机6,上位机6即可获得沉井的滚动角以及垂直度等姿态信息,从而对沉井姿态以及水下掘进机姿态进行实时监测,确保对沉井的顺利掘进。
48.本实用新型的基于双线激光的沉井掘进机导向系统的特点及优点是:
49.一、该基于双线激光的沉井掘进机导向系统,通过倾角仪102检测沉井管片5的倾斜角度,通过激光靶101检测沉井管片5的垂直度,并将检测到的数据传输至上位机6,从而可获得沉井的滚动角以及垂直度等姿态信息,达到沉井姿态的实时监测的目的,整个测量过程完全无需工作人员下井作业,大大提高了水下掘进机姿态测量的精确度和自动化程度。
50.二、该基于双线激光的沉井掘进机导向系统,将激光靶101设置于导向管3的内部,导向管3不仅将激光靶101与沉井中的水相隔离,而且为激光射入水中提供了通道,即使在水下进行掘进作业,也能够确保激光发射器2与激光靶101相配合准确采集沉井的垂直度信息,解决了水下环境无法采用激光直接照射测量的难题,从而适用于水下环境的掘进作业,提高测量精度。
51.三、该基于双线激光的沉井掘进机导向系统,可实现掘进机自动导向的功能,同时承受沉井内泥水的压力,无需人工下井作业,检测结果可直接对外显示,实时性以及自动化程度得到大大提高。
52.以上所述仅为本实用新型示意性的具体实施方式,并非用以限定本实用新型的范围。任何本领域的技术人员,在不脱离本实用新型的构思和原则的前提下所作出的等同变化与修改,均应属于本实用新型保护的范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。