1.本发明涉及焊接技术领域,尤其是涉及一种激光熔锡喷射焊双通道进料系统。
背景技术:
2.锡焊是将低熔点的金属锡球加热熔化后,渗入并充填金属件连接处间隙的焊接方法。随着电子行业的快速发展,电子产品构件越来越小巧,精密度、电子集成度越来越高,对焊接技术的要求也越来越高,激光熔锡喷射焊以其高精度、高效率和高可靠性等优点逐步取代了传统的锡焊技术。
3.焊接时通常通过送料机构将储料室中的锡球传送至焊头内,但是现有技术中只能进行同一尺寸的锡球传送,不同间距的两个待焊接件需要采用不同大小的焊球,间距大的需要尺寸较大的焊球,间距小的需要尺寸较小的焊球,若间距大于焊球的直径焊接后易断路,若间距小于焊球的直径焊接后易短路,此时需配备不同规格的送料机构,成本较高,且更换不同送料机构操作较为繁琐。
技术实现要素:
4.本发明要解决的技术问题是:为了克服现有送料机构只能实现同一尺寸锡球传送的问题,现提供一种激光熔锡喷射焊双通道进料系统。
5.为了解决上述技术问题,本发明采用如下技术方案:一种激光熔锡喷射焊双通道进料系统包括;驱动轴;输送机构,具有第一送料盘和第二送料盘,所述第一送料盘用于通过自身的转动将第一进料通道内的锡球输送至第一出料通道;第二送料盘用于通过自身的转动将第二进料通道内的锡球输送至第二出料通道;第一单向传动机构,配置在驱动轴和第一送料盘之间,用于在驱动轴沿第一方向转动时带动第一送料盘同步转动;以及第二单向传动机构,配置在驱动轴和第二送料盘之间,用于在驱动轴沿与第一方向相反的第二方向转动时带动第二送料盘同步转动。
6.上述技术方案通过在一个输送机构中设置两个送料盘,可实现两种尺寸的锡球输送,且利用第一单向传动机构及第二单向传动机构实现了同一时间内仅有一个送料盘转动进行送料,该系统满足两种锡球需求,结构简单、布局紧凑且操作方便。
7.进一步的,所述第一单向传动机构为单向离合器或棘轮棘爪机构,所述第二单向传动机构为单向离合器或棘轮棘爪机构。
8.进一步的,还包括第一防反转机构及第二防反转机构,所述第一防反转机构用于允许第一送料盘沿第一方向转动且阻止其沿第二方向转动;所述第二防反转机构用于允许第二送料盘沿第二方向转动且阻止其沿第一方向转动,第一防反转机构及第二防反转机构进一步保证了同一时间内仅有一个送料盘转动进行送料。
9.进一步的,所述第一单向传动机构包括第一棘轮、第一棘爪及第一弹片,第一棘爪转动连接在第一送料盘上,第一弹片安装在第一送料盘上,用于推动第一棘爪抵住第一棘轮的外周壁;所述第二单向传动机构包括第二棘轮、第二棘爪及第二弹片,第二棘爪转动连接在第二送料盘上,第二弹片安装在第二送料盘上,用于推动第二棘爪抵住第二棘轮的外周壁。
10.所述第一棘轮与第二棘轮套设在所述驱动轴上,且沿驱动轴的轴向分布,第一棘轮与第二棘轮的棘轮齿旋向相反。
11.本发明中,第一方向可为顺时针方向,第二方向可为逆时针方向。电机带动驱动轴顺时针转动时,第一棘轮跟随顺时针转动,当第一棘爪与第一棘轮的棘轮齿接触时,二者间力的方向为圆周切向方向,第一弹片不会受到径向的力而弹开从而可将第一棘爪抵住,第一棘爪插入第一棘轮的齿槽,第一棘轮带动第一送料盘顺时针转动;同时第二棘轮也为顺时针转动,当第二棘爪与第二棘轮的棘轮齿接触,二者之间力的方向为径向,第二弹片被弹开,第二棘爪在第二棘轮的齿背上滑过,第二送料盘保持静止。
12.同理,电机带动驱动轴逆时针转动时,第二棘轮跟随逆时针转动,当第二棘爪与第二棘轮的棘轮齿接触,第二弹片将第二棘爪抵住,第二棘爪插入第二棘轮的齿槽,第二棘轮带动第二送料盘逆时针转动;同时第一棘轮也为逆时针转动,当第一棘爪与第一棘轮的棘轮齿接触时,第一弹片被弹开,第一棘爪在第一棘轮的齿背上滑过,第一送料盘保持静止。
13.进一步的,第一防反转机构及第二防反转机构均为棘轮棘爪机构,利用棘轮棘爪机构的单向运动特性实现防反转功能。
14.进一步的,第一防反转机构包括第三棘轮、第三棘爪及第三弹片,第三弹片用于推动第三棘爪抵住第三棘轮的外周壁;所述第二防反转机构包括第四棘轮、第四棘爪及第四弹片,第四弹片用于推动第四棘爪抵住第四棘轮的外周壁,第三棘轮与第一送料盘固定连接,所述第四棘轮与第二送料盘固定连接。
15.第一送料盘顺时针转动时,当第三棘轮的棘轮齿与第三棘爪接触,二者之间力的方向为径向,第三弹片被弹开,第三棘爪在第三棘轮的齿背上滑过,第一送料盘可继续顺时针转动,若第一送料盘逆时针转动,当第三棘爪与第三棘轮的棘轮齿接触时,二者间力的方向为圆周切向方向,第三弹片不会受到径向的力而弹开从而可将第三棘爪抵住,此时第三棘爪插入第三棘轮的齿槽可阻止第一送料盘继续逆时针转动。
16.同理,第二送料盘逆时针转动时,当第四棘轮的棘轮齿与第四棘爪接触,二者之间力的方向为径向,第四弹片被弹开,第四棘爪在第四棘轮的齿背上滑过,第二送料盘可继续逆时针转动,若第二送料盘顺时针转动,当第四棘爪与第四棘轮的棘轮齿接触时,二者间力的方向为圆周切向方向,第四弹片不会受到径向的力而弹开从而可将第四棘爪抵住,此时第四棘爪插入第四棘轮的齿槽可阻止第二送料盘继续顺时针转动。
17.进一步的,所述第一棘爪、第二棘爪均为钩状,当其分别和所匹配的棘轮齿啮合时,其铰接点均位于其所匹配的棘轮齿的齿背侧,钩状的棘爪在与棘轮齿啮合时可产生更大的咬合力。
18.进一步的,第三棘爪及第四棘爪均为钩状,当其分别和所匹配的棘轮齿啮合时,其铰接点均位于其所匹配的棘轮齿的齿背侧,钩状的棘爪在与棘轮齿啮合时可产生更大的咬
合力。
19.进一步的,输送机构内设有呈上下分布的第一容置腔及第二容置腔,第一送料盘位于第一容置腔内,第一送料盘上开有若干沿其周向分布的第一送料孔,第一容置腔的顶部与第一进料通道连通,第一容置腔的底部与第一出料通道连通,所述第一进料通道的底端及第一出料通道的顶端均位于第一送料孔的运动轨迹上;所述第二送料盘位于第二容置腔内,第一送料孔及第二送料孔均仅能容纳单颗锡球,且第一送料孔及第二送料孔的直径不同来容纳不同直径的锡球,第二容置腔顶部与第二进料通道连通,第二容置腔的底部与第二出料通道连通,所述第二进料通道的底端及第二出料通道的顶端均位于第二送料孔的运动轨迹上,第一出料通道与第二出料通道的底部均与出料干路通道连通,第一出料通道、第二出料通道均自容置腔向出料干路通道的方向逐渐朝下倾斜。当送料孔与进料通道的底端对齐时,进料通道内的锡球进入送料孔,当装有锡球的送料孔与出料通道顶端对齐时,锡球可依靠其自身重力通过出料通道进入出料干路通道。
20.所述第一进料通道与第一出料通道交错分布,所述第二进料通道与第二出料通道交错分布,进料通道的底端与出料通道的顶端不在一条直线上,从进料通道进入的锡球需转动一定角度后方能进入出料通道,避免当进料通道底端及送料孔刚好对齐时,从进料通道进入的锡球不经转动直接进入出料通道,导致同一时间内可能出现两种尺寸的锡球进入焊头。
21.所述输送机构的顶部固定有储料仓,所述储料仓包括第一仓部及第二仓部,可用于存储两种不同尺寸的锡球,第一仓部与第一进料通道连通,第二仓部与第二进料通道连通。
22.进一步的,所述第一送料盘、第二送料盘与驱动轴均为同轴设置,驱动轴带动第一送料盘及第二送料盘同轴转动,可使该进料系统布局更为紧凑,节省空间。
23.本发明的有益效果:本发明通过在一个输送机构中设置两个送料盘,可实现两种尺寸的锡球输送,且利用第一单向传动机构及第二单向传动机构实现了同一时间内仅有一个送料盘转动进行送料,该系统满足两种焊接用料需求,结构简单、布局紧凑且操作方便。
附图说明
24.下面结合附图和实施例对本发明进一步说明。
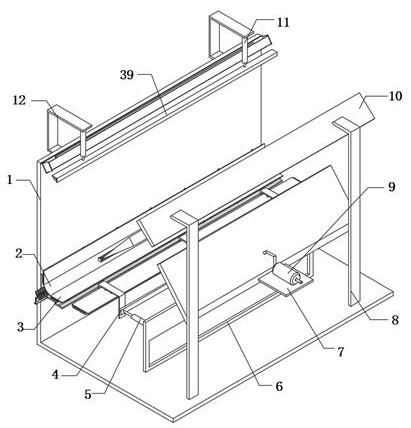
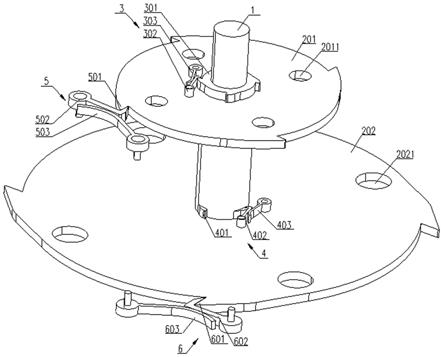
25.图1是本发明的结构图;图2是本发明的剖视图;图3是本发明的爆炸图;图4是传动机构、防反转机构、驱动轴、第一送料盘及第二送料盘的配合示意图;图5是传动机构、防反转机构、驱动轴及输送机构配合的俯视图;图中:1、驱动轴;2、输送机构;201、第一送料盘;2011、第一送料孔;202、第二送料盘;2021、第二送料孔;203、第一进料通道;204、第一出料通道;205、第二进料通道;206、第二出料通道;207、第一容置腔;208、第二容置腔;209、出料干路通道;
3、第一单向传动机构;301、第一棘轮;302、第一棘爪;303、第一弹片;4、第二单向传动机构;401、第二棘轮;402、第二棘爪;403、第二弹片;5、第一防反转机构;501、第三棘轮;502、第三棘爪;503、第三弹片;6、第二防反转机构;601、第四棘轮;602、第四棘爪;603、第四弹片;7、储料仓;701、第一仓部;702、第二仓部。
具体实施方式
26.现在结合附图对本发明作进一步详细的说明。这些附图均为简化的示意图,仅以示意方式说明本发明的基本结构,因此其仅显示与本发明有关的构成。
27.实施例一:如图1-图5所示,本发明是一种激光熔锡喷射焊双通道进料系统包括:驱动轴1;输送机构2,具有第一送料盘201和第二送料盘202,所述第一送料盘201用于通过自身的转动将第一进料通道203内的锡球输送至第一出料通道204;第二送料盘202用于通过自身的转动将第二进料通道205内的锡球输送至第二出料通道206;输送机构2包括依次连接的上盖、主腔体及底座,上盖与主腔体之间形成有容置第一送料盘201的第一容置腔207,以及主腔体与底座之间形成有容置第二送料盘202的第二容置腔208;输送机构2也可包括两个送料体,两个送料体均包括上盖与底座,两者之间形成有容置送料盘的容置腔,两个送料体呈上下分布进行堆叠。
28.第一送料盘201位于第一容置腔207内,第一送料盘201上开有若干沿其周向分布的第一送料孔2011,第一容置腔207的顶部与第一进料通道203连通,第一容置腔207的底部与第一出料通道204连通,所述第一进料通道203的底端及第一出料通道204的顶端均位于第一送料孔2011的运动轨迹上;所述第二送料盘202位于第二容置腔208内,第一送料孔2011及第二送料孔2021均仅能容纳单颗锡球,且第一送料孔2011及第二送料孔2021的直径不同来容纳不同直径的锡球,第二容置腔208顶部与第二进料通道205连通,第二容置腔208的底部与第二出料通道206连通,所述第二进料通道205的底端及第二出料通道206的顶端均位于第二送料孔2021的运动轨迹上,第一出料通道204与第二出料通道206的底部均与出料干路通道209连通,第一出料通道204、第二出料通道206均自容置腔向出料干路通道209的方向逐渐朝下倾斜。当送料孔与进料通道的底端对齐时,进料通道内的锡球进入送料孔,当装有锡球的送料孔与出料通道顶端对齐时,锡球可依靠其自身重力通过出料通道进入出料干路通道209。
29.驱动轴1与第一送料盘201、第二送料盘202可同轴设置,驱动轴1带动第一送料盘201及第二送料盘202同轴转动,使该进料系统布局更为紧凑,节省空间,驱动轴1也可设于输送机构2外。
30.所述第一进料通道203与第一出料通道204交错分布,所述第二进料通道205与第二出料通道206交错分布,进料通道的底端与出料通道的顶端不在一条直线上,从进料通道进入的锡球需转动一定角度后方能进入出料通道,避免当进料通道底端及送料孔刚好对齐时,从进料通道进入的锡球不经转动直接进入出料通道,导致同一时间内可能出现两种尺寸的锡球进入焊头。
31.所述输送机构2的顶部固定有储料仓7,所述储料仓7包括第一仓部701及第二仓部702,可用于存储两种不同尺寸的锡球,第一仓部701与第一进料通道203连通,第二仓部702与第二进料通道205连通。
32.第一单向传动机构3,配置在驱动轴1和第一送料盘201之间,用于在驱动轴1沿第一方向转动时带动第一送料盘201同步转动,以及第二单向传动机构4,配置在驱动轴1和第二送料盘202之间,用于在驱动轴1沿与第一方向相反的第二方向转动时带动第二送料盘202同步转动。所述第一单向传动机构3为单向离合器或棘轮棘爪机构,所述第二单向传动机构4也为单向离合器或棘轮棘爪机构。
33.当第一单向传动机构3为棘轮棘爪机构时,包括第一棘轮301、第一棘爪302及第一弹片303,第一棘爪302转动连接在第一送料盘201上,第一弹片303安装在第一送料盘201上,用于推动第一棘爪302抵住第一棘轮301的外周壁。
34.当第二单向传动机构4为棘轮棘爪机构时,包括第二棘轮401、第二棘爪402及第二弹片403,第二棘爪402转动连接在第二送料盘202上,第二弹片403安装在第二送料盘202上,用于推动第二棘爪402抵住第二棘轮401的外周壁,所述第一棘轮301与第二棘轮401套设在所述驱动轴1上,且沿驱动轴1的轴向分布,第一棘轮301与第二棘轮401的棘轮齿旋向相反,第一棘爪302、第二棘爪402均为钩状,当其分别和所匹配的棘轮齿啮合时,各棘爪的铰接点均位于其所匹配的棘轮齿的齿背侧,钩状的棘爪在与棘轮齿啮合时可产生更大的咬合力。
35.本发明中,第一方向可为顺时针方向,第二方向可为逆时针方向。电机带动驱动轴1顺时针转动时,第一棘轮301跟随顺时针转动,当第一棘爪302与第一棘轮301的棘轮齿接触时,二者间力的方向为圆周切向方向,第一弹片303不会受到径向的力而弹开从而可将第一棘爪302抵住,第一棘爪302插入第一棘轮301的齿槽,第一棘轮301带动第一送料盘201顺时针转动;同时第二棘轮401也为顺时针转动,当第二棘爪402与第二棘轮401的棘轮齿接触,二者之间力的方向为径向,第二弹片403被弹开,第二棘爪402在第二棘轮401的齿背上滑过,第二送料盘202保持静止。
36.同理,电机带动驱动轴1逆时针转动时,第二棘轮401跟随逆时针转动,当第二棘爪402与第二棘轮401的棘轮齿接触,第二弹片403将第二棘爪402抵住,第二棘爪402插入第二棘轮401的齿槽,第二棘轮401带动第二送料盘202逆时针转动;同时第一棘轮301也为逆时针转动,当第一棘爪302与第一棘轮301的棘轮齿接触时,第一弹片303被弹开,第一棘爪302在第一棘轮301的齿背上滑过,第一送料盘201保持静止。
37.实施例二:本实施例与实施例一的区别在于:还包括第一防反转机构5及第二防反转机构6,两者均为棘轮棘爪机构;所述第一防反转机构5用于允许第一送料盘201沿第一方向转动且阻止其沿第二方向转动;所述第二防反转机构6用于允许第二送料盘202沿第二方向转动且阻止其沿第一方向转动,第一防反转机构5及第二防反转机构6进一步保证了同一时间内仅有一个送料盘转动进行送料。
38.第一防反转机构5包括第三棘轮501、第三棘爪502及第三弹片503,第三弹片503用于推动第三棘爪502抵住第三棘轮501的外周壁,第三棘爪502和第三弹片503可位于第一容
置腔207内也位于输送机构2外;所述第二防反转机构6包括第四棘轮601、第四棘爪602及第四弹片603,第四弹片603用于推动第四棘爪602抵住第四棘轮601的外周壁,第四棘爪602和第四弹片603可位于第二容置腔208内也位于输送机构2外,第三棘轮501与第一送料盘201固定连接,所述第四棘轮601与第二送料盘202固定连接,第三棘爪502及第四棘爪602为钩状,当其分别和所匹配的棘轮齿啮合时,各棘爪的铰接点均位于其所匹配的棘轮齿的齿背侧,钩状的棘爪在与棘轮齿啮合时可产生更大的咬合力。
39.第一送料盘201顺时针转动时,当第三棘轮501的棘轮齿与第三棘爪502接触,二者之间力的方向为径向,第三弹片503被弹开,第三棘爪502在第三棘轮501的齿背上滑过,第一送料盘201可继续顺时针转动,若第一送料盘201逆时针转动,当第三棘爪502与第三棘轮501的棘轮齿接触时,二者间力的方向为圆周切向方向,第三弹片503不会受到径向的力而弹开从而可将第三棘爪502抵住,此时第三棘爪502插入第三棘轮501的齿槽可阻止第一送料盘201继续逆时针转动。
40.同理,第二送料盘202逆时针转动时,当第四棘轮601的棘轮齿与第四棘爪602接触,二者之间力的方向为径向,第四弹片603被弹开,第四棘爪602在第四棘轮601的齿背上滑过,第二送料盘202可继续逆时针转动,若第二送料盘202顺时针转动,当第四棘爪602与第四棘轮601的棘轮齿接触时,二者间力的方向为圆周切向方向,第四弹片603不会受到径向的力而弹开从而可将第四棘爪602抵住,此时第四棘爪602插入第四棘轮601的齿槽可阻止第二送料盘202继续顺时针转动。
41.工作原理:首先在储料仓7内放入锡球,小直径的锡球进入第一进料通道203,大直径的锡球进入第二进料通道205,当需要小直径锡球进行焊接时,电机带动驱动轴1顺时针转动,第一棘轮301跟随顺时针转动,第一棘爪与第一棘轮301的棘轮齿接触,此时二者间力的方向为圆周切向方向,第一弹片303不会受到径向的力而弹开从而可将第一棘爪302抵住,第一棘爪302插入第一棘轮301的齿槽,第一棘轮301带动第一送料盘201顺时针转动,当第一进料通道203的底端与第一送料孔2011对齐时,锡球进入第一送料孔2011,第一送料盘201继续转动,锡球随之转动,当装有锡球的第一送料孔2011与第一出料通道204的顶端对齐时,锡球进入第一出料通道204滚落至出料干路通道209,随后进入焊头,而此时第二棘轮401也为顺时针转动,第二棘爪402与第二棘轮401的棘轮齿接触,此时二者之间力的方向为径向,第二弹片403被弹开,第二棘爪402在第二棘轮401的齿背上滑过,第二送料盘202保持静止,且由于第二防反转机构6的存在,进一步保证了第二送料盘202的静止状态,避免第一送料盘201及第二送料盘202同时送料。
42.当需要大直径锡球进行焊接时,电机带动驱动轴1逆时针转动,带动第二棘轮401逆时针转动,第二棘轮401与第二棘爪402配合带动第二送料盘202逆时针转动来输送锡球,而此时第一棘轮301也为逆时针转动,第一棘爪302与第一棘轮301的棘轮齿接触,此时二者之间力的方向为径向,第一弹片303被弹开,第一送料盘201保持静止,且由于第一防反转机构5的存在,进一步保证了第一送料盘201的静止状态,避免第一送料盘201及第二送料盘202同时送料。
43.以上述依据本发明的理想实施例为启示,通过上述的说明内容,相关工作人员完全可以在不偏离本项发明技术思想的范围内,进行多样的变更以及修改。本项发明的技术性范围并不局限于说明书上的内容,必须要根据权利要求范围来确定其技术性范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。