1.本发明属于翼型结构模型的性能研究技术领域,具体涉及一种组合舵多维耦合水动力高精度测量装置。应用于水洞试验。
背景技术:
2.现有的水洞舵力测量装置一般采用单个三分力传感器测量组合舵整体受力,受限于传感器性能以及舵翼耦合水动力干扰,无法测量组合舵转舵力矩。稳定翼固定在水洞盖板下方,无法调节转动角度,限制了组合舵水动力测量工况,并且组合舵翼安装角度偏差会对测量精度产生不利影响。
技术实现要素:
3.本发明的目的就是为了解决上述背景技术存在的不足,提供一种用于水洞试验中对舵翼组合舵多维耦合水动力高精度测量装置。有效解决了舵翼组合中转动舵的耦合受力和转舵力矩的测量难题,适用于多种组合舵水动力测量试验工况。
4.本发明采用的技术方案是:一种组合舵多维耦合水动力高精度测量装置,包括围井、密封于围井下方的水洞盖板和设于围井内的闭环步进电机,两个所述闭环步进电机分别通过联轴器与传感器固支端转轴连接,两个所述传感器固支端转轴分别穿过水洞盖板与六分力传感器、三分力传感器相连,所述六分力传感器、三分力传感器分别与转动舵负载轴、稳定翼负载轴相连,所述转动舵负载轴、稳定翼负载轴位于水洞盖板下方,转动舵安装于转动舵负载轴上,稳定翼安装于稳定翼负载轴上。实现组合舵中转动舵和稳定翼的独立转动控制以及转动舵角的精确调整。基于独立转动控制,克服转动舵及稳定翼各个方向水动力分量之间的耦合作用,提高测量精度。
5.进一步优选的结构,所述水洞盖板内开设上下连通的上安装孔、过度安装孔和下安装孔;主转盘通过主转盘轴承安装于上安装孔内圈,水洞盖板底盘安装于下安装孔内圈。
6.进一步优选的结构,所述主转盘轴承外圈设有上压环,内圈设有下压环,所述上压环用于定位主转盘轴承外圈且与水洞盖板固定,所述下压环位于主转盘轴承内圈与主转盘共同旋转。
7.进一步优选的结构,所述下压环位于过度安装孔内。
8.进一步优选的结构,所述围井安装于主转盘上端面的围井安装孔内。
9.进一步优选的结构,所述主转盘上安装指针座和角度尺,所述指针座和角度尺通过主转盘上端面的固定孔固定于主转盘上。通过机械定位精确控制组合舵安装角度,修正安装角度偏差。
10.进一步优选的结构,所述闭环步进电机通过电机轴承固定于电机座上,所述电机座设于围井内。
11.进一步优选的结构,所述水洞盖板固定在水洞可视工作段上方。
12.进一步优选的结构,所述围井为双层透明水筒嵌套结构。包括外层透明水筒和内
层透明水筒,其中,外层透明水筒的高度低于内层明水筒的高度。保证水洞加满水后水不会从围井溢出,对电机起防水保护作用的同时便于水洞水位实时可视化。
13.进一步优选的结构,所述围井为亚克力管。
14.本发明的有益效果是:
15.1、采用六分力传感器和三分力传感器分别测量转动舵和稳定翼水动力,并基于步进电机实现舵翼独立转动控制,克服了转动舵及稳定翼各个方向水动力分量之间的耦合作用,实现不同舵角、舵翼形状下组合舵的纵向力、横向力和转舵力矩的测量,提高了测量精度。
16.2、为兼顾水洞盖板上方围井重量与强度需求,围井采用亚克力材质的双层透明水筒嵌套设计,保证水洞加满水后水不会从围井溢出,对电机起防水保护作用的同时便于水洞水位实时可视化,避免因不同工况下水位高度改变引起试验流速变化。
17.3、在水洞盖板的主转盘处设置指针与角度尺,通过机械定位精确控制组合舵安装角度,修正安装角度偏差。在完成一个舵角的测量后,可通过电机调节转动舵舵角,从而可以不拆卸试验装置就完成一种组合舵全部舵角的测量,提高了试验效率,并且可通过旋转主转盘实现斜流工况试验需求。
附图说明
18.图1为本发明的剖视图;
19.图2为本发明的俯视图;
20.图3为围井剖视图;
21.图4为闭环步进电机剖视图;
22.图5为电机轴承剖视图;
23.图6为传感器固支端转轴剖视图;
24.图7为六分力传感器或三分力传感器剖视图;
25.图8为转动舵负载轴或稳定翼负载轴剖视图;
26.图9为水洞盖板剖视图;
27.图10为角度尺剖视图;
28.图11为指针座剖视图;
29.图12为主转盘剖视图;
30.图13为上压环剖视图;
31.图14为下压环剖视图;
32.图15为主转盘轴承剖视图;
33.图16为水洞盖板底盘俯视图;
34.图17为水洞盖板底盘剖视图。
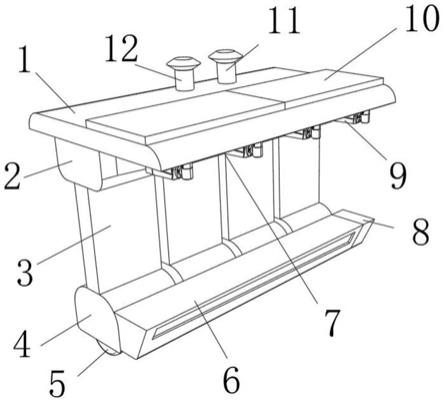
35.图中,1-围井、2-闭环步进电机、3-电机座、4-联轴器、5-电机轴承、6-传感器固支端转轴、7-六分力传感器、8-三分力传感器、9-转动舵负载轴、10-稳定翼负载轴、11-水洞盖板(11-1-上安装孔、11-2-过度安装孔、11-3-下安装孔)、12-角度尺、13-指针座、14-主转盘(14-1-围井安装孔、14-2-固定孔)、15-上压环、16-下压环、17-主转盘轴承、18-水洞盖板底盘。
具体实施方式
36.下面结合附图和具体实施例对本发明作进一步的详细说明,便于清楚地了解本发明,但它们不对本发明构成限定。
37.如图1-17所示,本发明包括围井1、密封于围井1下方的水洞盖板11和设于围井1内的闭环步进电机2,两个所述闭环步进电机2分别通过联轴器4与传感器固支端转轴6连接,两个所述传感器固支端转轴6分别穿过水洞盖板11与六分力传感器7、三分力传感器8相连,所述六分力传感器7、三分力传感器8分别与转动舵负载轴9、稳定翼负载轴10相连,所述转动舵负载轴9、稳定翼负载轴10位于水洞盖板11下方,转动舵安装于转动舵负载轴9上,稳定翼安装于稳定翼负载轴10上。
38.所述水洞盖板11内开设上下连通的上安装孔11-1、过度安装孔11-2和下安装孔11-3;主转盘14通过主转盘轴承17安装于上安装孔11-1内圈,水洞盖板底盘18安装于下安装孔11-3内圈。
39.所述主转盘轴承17外圈设有上压环15,内圈设有下压环16,所述上压环15用于定位主转盘轴承17外圈且与水洞盖板11固定,所述下压环16位于主转盘轴承17内圈与主转盘14共同旋转。
40.所述下压环16位于过度安装孔11-2内。
41.所述围井1安装于主转盘14上端面的围井安装孔14-1内。
42.所述主转盘14上安装指针座13和角度尺12,所述指针座13和角度尺12通过主转盘14上端面的固定孔14-2固定于主转盘14上。
43.所述闭环步进电机2通过电机轴承5固定于电机座3上,所述电机座3设于围井1内。
44.所述水洞盖板11固定在水洞可视工作段上方。
45.所述围井1为双层透明水筒嵌套结构。
46.所述围井1为亚克力管。
47.本发明实现组合舵的转动舵和稳定翼的独立转动控制。透明亚克力管围井1采用双层嵌套设计固定在水洞盖板11上方,转臂和指针座13与水洞盖板11的主转盘14相连,搭配角度尺12调节舵翼安装角度。
48.在使用本装置对组合舵的纵向力、横向力和转舵力矩进行测量时,先将稳定翼安装到稳定翼负载轴10上,将转动舵安装到转动舵负载轴9上,再将本实验装置吊装在水洞可视工作段上方。试验过程中使用六分力传感器7和三分力传感器8分别测量转动舵的纵向力、横向力和转舵力矩以及稳定翼的纵向力和横向力,通过闭环步进电机2分别控制转动舵和稳定翼的转动角度,完成不同试验工况的组合舵水动力测量。其中水洞内水流流动方向为纵向,垂直水流流动方向且平行于地面为横向。
49.本试验装置中采用的六分力传感器7特制ip68防水等级,可配合自主设计的用于水洞的组合舵多维耦合水动力高精度测量装置进行水下测量作业,六分力传感器7测力量程fx《500n,fy《500n,fz《2000n,测力矩量程mx《20n
·
m,my《20n
·
m,mz《40n
·
m,满足水洞试验测量需求,进行多自由度力和力矩的耦合测量。
50.在水洞盖板11的主转盘14处设置指针座13与角度尺12,通过机械定位精确控制组合舵安装角度,修正安装角度偏差。在完成一个舵角的测量后,可通过闭环步进电机2调节转动舵舵角,从而可以不拆卸试验装置就完成一种组合舵全部舵角的测量,提高了试验效
率,并且可通过旋转主转盘14实现斜流工况试验需求。
51.本说明书中未作详细描述的内容属于本领域专业技术人员公知的现有技术。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。