1.本实用新型涉及零值绝缘子检测技术领域,尤其涉及一种机载式零值绝缘子检测装置。
背景技术:
2.作为电力系统的重要组成部分,绝缘子广泛分布于输电线和杆塔的连接处,承担着支撑输电线路以及电气绝缘的作用。在长期的气候环境、温度、湿度等的影响下,加上运行过程中的机械负荷、机电负荷以及冷热变化等,绝缘子串机械性能和绝缘性能将会显著降低,从而产生劣化绝缘子,成为引发闪络、掉串、炸裂和脆断事故的重要隐患。据统计,输变电悬式绝缘子的年劣化率平均为0.3%左右,相当于220kv耐张塔平均每基约有一片零值;随着运行时间的增长,复合绝缘子的劣化问题也愈加突出,我国电网辖区曾发生多起因绝缘子劣化造成的绝缘子闪络和断裂事故。所以,开展有效的劣化绝缘子定期检测,并在事故发生前及时排除缺陷具有重要的意义。
3.考虑到实际工程运用的可靠性及户外运行环境的复杂性,目前运维人员仍主要采用绝缘电阻法与火花间隙法来检测劣化绝缘子。这两种传统的检测方法均为接触式方法,需停电作业,作业人员携带仪器登杆作业,均存在工作量大、工作性质危险的问题,不能满足当下电网运行单位对数字化智能运维的需求。
技术实现要素:
4.本实用新型的目的是提供一种机载式零值绝缘子检测装置,可以有效保障电力系统的安全稳定运行;同时设备不停电检测,保证检测结果准确可靠。
5.本实用新型为实现上述实用新型目的采用如下技术方案:
6.本实用新型提供了一种机载式零值绝缘子检测装置,包括:
7.探测传感器,用于测距并探测绝缘子周围空间电场;
8.吊舱,内置有驱动装置,所述驱动装置的输出端通过伸缩杆与所述探测传感器相连,通过所述驱动装置驱动所述伸缩杆水平位移进而调节所述探测传感器的探测距离;
9.手持终端,与所述探测传感器、驱动装置通讯连接。
10.进一步地,所述吊舱接头设置有能够向所述探测传感器、驱动装置供电的转接环。
11.进一步地,所述驱动装置包括内置于所述吊舱内的舵机、主控模块,所述舵机的输出端套接有用于驱动所述伸缩杆平移的滚轮,所述主控模块的电源接口与所述转接环的供电接口相连,所述主控模块的控制信号i/o接口与所述舵机相连,所述主控模块与手持终端通讯相连。
12.进一步地,所述探测传感器内置有电场探头模块、测距传感器模块、放大滤波模块、无线透传模块、单片机模块以及电源逆变模块;
13.所述电场探头模块探测工频电场强度,将工频电场信号转换为电压信号;
14.所述放大滤波模块将电压信号放大、跟随,并滤除干扰后,输出至所述单片机模块
的adc端口;
15.所述测距传感器模块用于将其与前方障碍物的距离转化为模拟电压信号,输出至所述单片机模块的adc端口;
16.所述单片机模块采集adc端口的电压输入信号、模拟电压信号,再次对电压输入信号滤除干扰后,进行分析处理并零值识别,并将零值识别结果及模拟电压信号输出至所述无线透传模块;
17.所述无线透传模块用于接收所述单片机模块输送的零值识别结果及模拟电压信号并发送至所述手持终端;
18.所述放大滤波模块、测距传感器模块、无线透传模块和单片机模块由所述转接环的供电接口供电,所述转接环的供电接口提供低压直流电源,经过探测传感器中的电源逆变模块,产生不同大小的电压,分别给放大滤波模块、测距传感器模块、无线透传模块和单片机模块供电。
19.进一步地,所述探测传感器的一侧布置有电场探头阵列。
20.进一步地,所述探测传感器上位于所述电场探头阵列的同一侧布置有测距传感器。
21.进一步地,所述探测传感器通过航插与所述伸缩杆连接,所述转接环的供电接口连接有延伸至所述伸缩杆内的电源线,所述电源线远离所述转接环的一端与所述航插相连。
22.进一步地,所述探测传感器器通过天线与所述手持终端通讯相连。
23.本实用新型的有益效果如下:
24.本实用新型可与市面上常用的商用无人机热插拔使用,无需登塔作业,可使得输电线路运检人员在不停电的情况下,通过简单的操作便能够开展零值绝缘子检测工作,可以有效保障电力系统的安全稳定运行;同时设备不停电检测,保证检测结果准确可靠。
附图说明
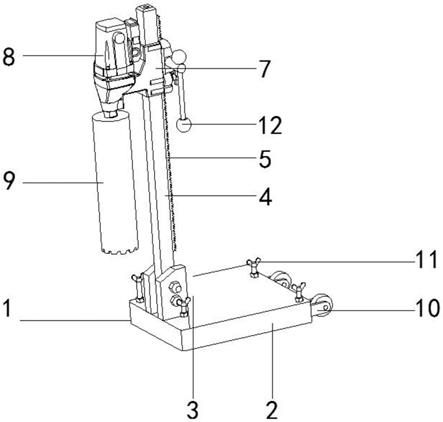
25.图1为根据本实用新型实施例提供的一种机载式零值绝缘子检测装置的结构示意图;
26.图2为图1中探测器的结构示意图;
27.图3为图1、图2中探测器的工作原理图;
28.图4为根据本实用新型实施例提供的一种机载式零值绝缘子检测方法的流程示意图。
具体实施方式
29.如图1所示,本实用新型提供的一种机载式零值绝缘子检测装置,包括探测传感器1、吊舱2、伸缩杆3、驱动装置4、转接环5、手持终端6;探测传感器1安装在伸缩杆3端部,用于测距并探测绝缘子周围空间电场器;驱动装置4及伸缩杆3安装在吊舱2内,伸缩杆3由驱动装置4控制调整长度,实现伸长缩短,达到控制探测距离的目的;转接环5与无人机的吊舱接头匹配,用于固定吊舱与无人机机身,并且引出无人机的供电接口,从而可以向驱动装置4和探测传感器1供电,以减轻机载装置整体重量;手持终端6用于控制伸缩杆3、观察探测传
感器1距离、接收检测结果。
30.如图1所示,伸缩杆3为总长2米左右的圆柱形杆,其材质可以是并不限于韧性较好的碳纤维或玻璃纤维,其安装在驱动装置4的舵机之间,启动驱动装置4后,伸缩杆3可以向两侧平移。
31.如图1所示,驱动装置4包括四个舵机和一个主控模块,舵机的输出端套接有用于驱动伸缩杆3平移的滚轮,主控模块的电源接口与转接环5的供电接口相连,主控模块的四个控制信号i/o接口与四个舵机相连,主控模块通过天线与手持终端完成通讯。
32.如图1所示,当手持终端6界面上的伸缩按钮开启后,手持终端6向驱动装置4的主控模块发送对应触发信号,主控模块接收到触发信号后,四个控制信号i/o接口输出正电平、负电平,从而驱动舵机正向转动、反向转动,从而控制伸缩;当按下伸缩停止按钮时,手持终端向驱动装置4的主控模块发送对应触发信号,四个控制信号i/o接口输出低电平,此时舵机由于失去工作电压而停止转动。
33.如图2所示,探测传感器侧方布置有四个电场探头阵列11,用于测量单片绝缘子附近的电场分布情况,从而为零值识别提供依据;电场探头阵列的平行位置布置有测距传感器模块12,其用于实时测量探头阵列与绝缘子串的相对位置,从而保证检测结果的有效性;探测传感器通过天线13与手持终端通讯,完成数据的传输;探测传感器通过航插14与伸缩杆连接,使探测传感器保持固定的同时,能够使探测传感器与伸缩杆内的电源线相连,从而可由转接环的供电接口为其供电。
34.如图3所示,探测传感器内部的主要器件包括四个电场探头模块、测距传感器模块、四个放大滤波模块、无线透传模块、单片机模块以及电源逆变模块。所述电场探头模块探测工频电场强度,将工频电场信号转换为毫伏级电压信号,通过放大滤波模块将信号放大、跟随,并滤除干扰后,输出至单片机模块的adc端口;测距传感器模块可以直接将其与前方障碍物的距离转化为模拟电压信号,输出至单片机模块的adc端口;单片机模块采集adc端口的电压输入信号、模拟电压信号,并通过软件滤波再次对电压输入信号消除外部干扰,对电压输入信号进行分析处理,进行零值识别;单片机模块将零值识别结果及模拟电压信号输出至无线透传模块,无线透传模块与手持终端互相通讯,使得检测情况得以显示。
35.如图3所示,所述放大滤波模块、测距传感器模块、无线透传模块和单片机模块由转接环的供电接口供电,供电接口提供低压直流电源,经过探测传感器中的电源逆变模块,产生不同大小的电压,分别给放大滤波模块、测距传感器模块、无线透传模块和单片机模块供电。
36.如图4所示,基于机载式零值绝缘子检测装置的方法及流程为:
37.1.利用商用无人机自带控制器及驾驶视角,操控无人机逐步靠近绝缘子串高压端,使其逐步靠近绝缘子串高压端,通过肉眼判别飞机与绝缘子串距离,在1
‑
2米左右时保持飞机悬停;
38.2.手持终端与驱动装置通讯,触发伸缩杆动作信号,伸缩杆匀速伸长;
39.3.实时观察测距传感器模块回传给手持终端的距离数值,待数值小于有效检测距离阈值后,触发伸缩杆停止动作,继续保持无人机悬停;
40.4.若伸缩杆伸到极限后仍无法达到小于有效检测距离阈值,则继续操控无人机缓慢逼近绝缘子;
41.5.达到有效检测距离后,操控无人机缓慢平移至绝缘子串高压端,期间观察手持终端的零值识别结果和回传的距离数据,操控飞行时保持距离始终小于有效检测距离阈值;
42.6.如果手持终端显示出现零值绝缘子,则停止飞行,记录探测传感器对应的绝缘子片位置,然后继续控制无人机向低压端平移;
43.7.整串绝缘子飞行检测完毕后,操作无人机返航。
44.本实用新型所采用的零值绝缘子识别方法为:通过探头阵列,测量与绝缘子串边缘相距一定距离、且与中轴平行的一小段空间的电场分布情况,来识别是否存在零值绝缘子。其中,四个探头等间距排列,总长度可以为10cm(小于单片绝缘子的高度)。设四个探头阵列测得的电场数据依次为数组e1,e2,e3,e4,则判定为零值绝缘子的条件为:
45.|e1‑
e2|/e1<2%
46.|e2‑
e3|/e2<2%
47.|e3‑
e4|/e3<2%
48.以上所述仅是本实用新型的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本实用新型技术原理的前提下,还可以做出若干改进和变形,这些改进和变形也应视为本实用新型的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。