1.本公开涉及一种递送系统、递送方法和程序。
背景技术:
2.日本未审查专利申请公开no.2019-69853公开了一种递送系统,在该递送系统中,在其中运载用于递送物品的递送车辆的运输车辆行驶到待递送物品的目的地(在下文中也称为物品的“递送目的地”)的附近,然后递送车辆离开运输车辆并且将物品递送到递送目的地。
技术实现要素:
3.发明人在日本未审查专利申请公开no.2019-69853中公开的递送系统中已发现了以下问题。
4.在日本未审查专利申请公开no.2019-69853中公开的递送系统中,当运输车辆突然加速或减速时(当运输车辆的加速度增加时),对在运输车辆中运载的递送车辆施加力,使得在递送车辆中可能发生意外位移(意外移动)。因此,例如,存在如下可能性:递送车辆移动并且与运输车辆的内壁碰撞,从而引起诸如递送车辆的故障以及待由递送车辆递送的物品的损坏的问题。
5.此外,在代替递送车辆(或除了递送车辆之外)在运输车辆中设置用于搬运物品的操纵器(机械人臂)的情况下,也可能发生类似的问题。也就是说,当运输车辆突然加速或减速时,对在运输车辆中设置的操纵器施加力,使得在操纵器中可能发生意外位移。因此,例如,存在如下可能性:操纵器可能移动而与运输车辆的内壁碰撞,从而引起诸如操纵器的故障以及正在由操纵器搬运的物品的损坏的问题。
6.已鉴于上述情况做出了本公开,并且其目的是为了提供一种能够防止否则由于运输车辆的突然加速或减速而在运输车辆中运载的递送车辆或运输车辆中设置的操纵器中将发生的问题的递送系统。
7.第一示例性方面是一种递送系统,该递送系统包括:
8.自主移动型递送车辆,该递送车辆被配置成将物品递送到其递送目的地;和
9.运输车辆,该运输车辆被配置成运载并运输递送车辆,其中:
10.递送系统使计算机执行包括以下步骤的过程:
11.从运输车辆获取关于运输车辆的加速度的信息;以及
12.基于关于加速度的信息预测由于运输车辆的加速度而在递送车辆中发生的位移,并且控制递送车辆的操作使得位移减小。
13.此外,另一示例性方面是一种递送方法,其中
14.自主移动型递送车辆被运载在运输车辆中并且由运输车辆递送,该递送车辆被配置成递送物品,并且
15.该递送方法包括:
16.从运输车辆获取关于运输车辆的加速度的信息;以及
17.基于关于加速度的信息预测由于运输车辆的加速度而在递送车辆中发生的位移,并且控制递送车辆的操作使得位移减小。
18.此外,另一示例性方面是一种用于将自主移动型递送车辆放置到运输车辆中并且由运输车辆运输递送车辆的程序,该递送车辆被配置成递送物品,其中
19.该程序被适配成使计算机执行包括以下步骤的过程:
20.从运输车辆获取关于运输车辆的加速度的信息;以及
21.基于关于加速度的信息预测由于运输车辆的加速度而在递送车辆中发生的位移,并且控制递送车辆的操作使得位移减小。
22.如上所述,根据本公开的一个方面:从运输车辆获取关于运输车辆的加速度的信息;基于关于加速度的信息预测由于运输车辆的加速度而在递送车辆中发生的位移;并且控制递送车辆的操作使得位移减小。因此,可以防止否则由于运输车辆的突然加速或减速而在运输车辆中运载的递送车辆中将发生的问题。
23.当控制递送车辆的操作以便减小位移时,可以降低递送车辆的重心。通过上述配置,可以有效地防止如递送车辆由于运输车辆的突然加速或减速而翻倒的问题这样的问题。
24.当控制递送车辆的操作以便减小位移时,可以制动递送车辆的车轮。通过上述配置,可以减小由于运输车辆的加速度而在递送车辆中发生的位移。
25.当控制递送车辆的操作以便减小位移时,可以驱动递送车辆的车轮以抵消位移。通过上述配置,可以更有效地减少由于运输车辆的加速度而在递送车辆中发生的位移。
26.操纵器可以设置在运输车辆和递送车辆中的至少一个中。此外,可以基于关于加速度的信息预测由于运输车辆的加速度而在操纵器中发生的位移,并且可以控制操纵器的操作使得位移减小。通过上述配置,可以防止由于运输车辆的突然加速或减速而否则会在操纵器中发生的问题。
27.另一示例性方面是一种递送系统,该递送系统包括:
28.运输车辆,该运输车辆被配置成运输待递送物品;以及
29.操纵器,该操纵器被配置成在运输车辆内部搬运物品,其中
30.递送系统使计算机执行包括以下步骤的过程:
31.从运输车辆获取关于运输车辆的加速度的信息;以及
32.基于关于加速度的信息预测由于运输车辆的加速度而在操纵器中发生的位移,并且控制操纵器的操作使得位移减小。
33.此外,另一示例性方面是一种递送方法,其中
34.在运输车辆和递送车辆中的至少一个中设置操纵器,以及
35.基于关于加速度的信息预测由于运输车辆的加速度而在操纵器中发生的位移,并且控制操纵器的操作使得位移减小。
36.此外,另一示例性方面是一种用于通过使用操纵器在运输车辆内部搬运待递送物品的程序,运输车辆被配置成运输物品,其中
37.该程序被适配成使计算机执行包括以下步骤的过程:
38.从运输车辆获取关于运输车辆的加速度的信息;以及
39.基于关于加速度的信息预测由于运输车辆的加速度而在操纵器中发生的位移,并且控制操纵器的操作使得位移减小。
40.如上所述,根据本发明的一个方面:从运输车辆获取关于运输车辆的加速度的信息;基于关于加速度的信息预测由于运输车辆的加速度而在操纵器中发生的位移;并且控制操纵器的操作使得位移减小。因此,可以防止由于运输车辆的突然加速或减速而在运输车辆中设置的操纵器中否则会发生的问题。
41.操纵器可以包括:基部;连杆基部,该连杆基部可旋转地连接到基部;以及可折叠连杆机构,该可折叠连杆机构可旋转地连接到连杆基部。此外,当控制操纵器的操作以减小位移时,可以折叠连杆机构,使得作用在连杆基部的旋转轴上的力矩减小。通过上述配置,可以更有效地减小由于运输车辆的加速度而在操纵器中发生的位移。
42.根据本公开,可以提供一种能够防止否则由于运输车辆的突然加速或减速而在运输车辆中运载的递送车辆或运输车辆中设置的操纵器中将发生的问题的运输系统。
43.本公开的上述及其他目的、特征和优点将从在下文中给出的详细描述和仅通过图示给出的附图中变得被更充分地理解,因此不应被认为限制本公开。
附图说明
44.图1是根据第一实施例的递送系统的框图;
45.图2是示出在运输车辆100内部的递送车辆200的侧视图;
46.图3是示出在运输车辆100内部的递送车辆200的侧视图;
47.图4是根据第二实施例的递送系统的框图;
48.图5是示出在运输车辆100内部的操纵器400的侧视图;以及
49.图6是示出在运输车辆100内部的操纵器400的侧视图。
具体实施方式
50.将参考附图在下文中详细地描述特定实施例。在整个附图中,相同或对应的元件通过相同的附图标记(或符号)表示,并且为了澄清解释按需要省略其冗余描述。
51.(第一实施例)
52.《递送系统的配置》
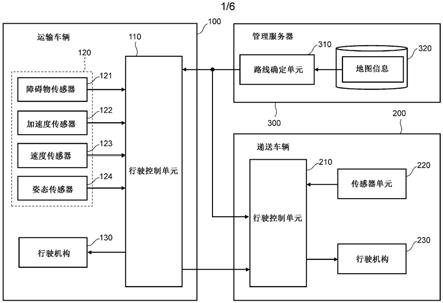
53.首先,将参考图1描述根据第一实施例的递送系统和递送方法。图1是根据第一实施例的递送系统的框图。如图1所示,根据此实施例的递送系统包括运输车辆100、递送车辆200和管理服务器300。
54.在根据此实施例的递送系统中,在运载递送车辆200的运输车辆100朝向物品的递送目的地行驶之后,递送车辆200离开运输车辆100并且将物品递送地递送目的地。然后,在根据此实施例的递送系统中:从运输车辆100获取关于运输车辆100的加速度的信息;基于关于加速度的信息预测由于运输车辆100的加速度而在递送车辆200中发生的位移;并且控制递送车辆200的操作使得位移减小。上述系列过程由计算机执行。
55.首先,将描述运输车辆100。
56.运输车辆100运载并运输递送车辆200。尽管此实施例中的运输车辆100是自主移动车辆(即,自主驾驶车辆),但是运输车辆100可以是由人类驾驶员驾驶的车辆。如图1所
示,运输车辆100包括行驶控制单元110、传感器单元120和行驶机构130。此外,运输车辆100无线地连接到递送车辆200和管理服务器300以便能够与它们进行通信。
57.注意,当管理服务器300布置在运输车辆100中时,运输车辆100可以通过电缆连接到管理服务器300。此外,尽管在图1所示的示例中运输车辆100包括仅一个递送车辆200,但是运输车辆100可以包括多个递送车辆200。
58.行驶控制单元110基于从传感器单元120获取的各种类型的信息来控制行驶机构130。以这种方式,运输车辆100自主地行驶。
59.此外,在根据实施例的递送系统中,行驶控制单元110将关于运输车辆100的加速度的信息发送到递送车辆200的行驶控制单元210。
60.行驶控制单元110包括例如诸如cpu(中央处理单元)的算术单元以及诸如ram(随机存取存储器)和rom(只读存储器)的存储单元,其中存储有各种类型的控制程序、数据等。也就是说,行驶控制单元110具有作为计算机的功能,并且基于前述各种类型的控制程序等来控制行驶机构130。
61.在图1所示的示例中,传感器单元120包括障碍物传感器121、加速度传感器122、速度传感器123和姿态传感器124。
62.障碍物传感器121检测在运输车辆100的行驶方向上的运输车辆100前方的障碍物。此外,障碍物传感器121在递送车辆200离开运输车辆100时检测障碍物。障碍物传感器121是例如雷达传感器、声纳传感器、超声传感器、激光雷达传感器、相机等。障碍物的示例包括诸如行人的人员和动物以及其他车辆和道路上已从其他车辆意外地掉落的物体。
63.加速度传感器122检测运输车辆100的加速度。可以通过检测运输车辆100的加速度来检测由路面上的凹凸等引起的运输车辆100的振动。
64.速度传感器123检测运输车辆100的速度。
65.姿态传感器124检测运输车辆100的姿态。可以通过姿态传感器124来检测运输车辆100正在其上行驶的道路的坡度(在下文中也称为道路坡度)。
66.行驶机构130是用于移动运输车辆100(即,使运输车辆100行驶)的机构。例如,除了包括用于移动运输车辆100的、诸如电动机或发动机的驱动机构之外,行驶机构130还包括用于停止运输车辆100的制动机构以及用于使运输车辆100转动(即,使运输车辆100改变行驶方向)的转向机构。
67.接下来,将描述递送车辆200。
68.递送车辆200是自主移动车辆,其在被运输车辆100运输之后,离开运输车辆100并且将物品递送到其递送目的地。如图1所示,递送车辆200包括行驶控制单元210、传感器单元220和行驶机构230。此外,递送车辆200无线地连接到运输车辆100和管理服务器300以便能够与它们进行通信。注意,当管理服务器300布置在递送车辆200中时,递送车辆200可以通过电缆连接到管理服务器300。
69.行驶控制单元210基于从传感器单元220获取的各种类型的信息来控制行驶机构230。也就是说,递送车辆200随着行驶控制单元210控制行驶机构230而自主地行驶。注意,类似于与运输车辆100的传感器单元120,传感器单元220包括各种类型的传感器。
70.此外,在根据实施例的递送系统中,行驶控制单元210从运输车辆100的行驶控制单元110获取关于运输车辆100的加速度的信息。然后,基于此信息预测由于运输车辆100的
加速度而在递送车辆200中发生的位移,并且控制行驶机构230使得位移减小。也就是说,递送车辆200的操作被控制。将稍后描述递送车辆200的操作的特定示例。
71.因此,关于运输车辆100中运载的递送车辆200,可以防止否则由于运输车辆100突然加速或减速而将发生的问题。
72.关于运输车辆100的加速度的信息是例如通过行驶控制单元110向行驶机构130提供以便指令行驶机构130加速或减速运输车辆100的控制信号所表示的信息。替换地,该信息可以是由加速度传感器122检测并由行驶控制单元110获取的运输车辆100的加速度。通过获取用于指示加速或减速的控制信号,可以在比获取由加速度传感器122检测到的运输车辆100的加速度的定时更早的定时控制递送车辆200的操作。因此,可以更有效地防止否则由于运输车辆100的突然加速或减速而将发生的问题。
73.类似于运输车辆100的行驶控制单元110,行驶控制单元210包括诸如cpu的算术单元、诸如ram、rom的存储单元,其中存储有各种类型的控制程序、数据等。也就是说,行驶控制单元210具有作为计算机的功能,并且基于前述各种类型的控制程序等来控制行驶机构230。
74.行驶机构230是用于移动递送车辆200(即,使递送车辆200行驶)的机构。例如,除了用于移动递送车辆200的、诸如电动机或发动机的驱动机构之外,行驶机构230还包括用于停止递送车辆200的制动机构以及用于使递送车辆200转动(即,使递送车辆200改变行驶方向)的转向机构。
75.接下来,将描述管理服务器300。
76.管理服务器300是用于管理递送系统的服务器,并且是例如云服务器。如图1所示,管理服务器300包括路线确定单元310和存储单元320。
77.如图1所示,路线确定单元310基于存储在存储单元320中的地图信息来确定从运输车辆100当前存在于的地点到递送目的地的递送路线。然后,路线确定单元310将所确定的递送路线发送到运输车辆100的行驶控制单元110和递送车辆200的行驶控制单元210。注意,地图信息可以包括路面信息。
78.如上所述,行驶控制单元210从运输车辆100的行驶控制单元110获取关于运输车辆100的加速度的信息。然后,行驶控制单元210基于此信息预测由于运输车辆100的加速度而在递送车辆200中发生的位移,并且控制递送车辆200的操作使得位移减小。
79.因此,在运输车辆100中运载的递送车辆200中,可以防止否则由于运输车辆100的突然加速或减速而将发生的问题。
80.《用于控制递送车辆200的操作的方法》
81.接下来,将参考图2和图3以及参考图1详细地描述当运输车辆100已突然加速或减速时执行的用于控制递送车辆200的操作的方法。图2和图3是示出在运输车辆100内部的递送车辆200的侧视图。
82.如图2和图3所示,根据此实施例的递送车辆200包括成对车轮w1、w2和w3、连接臂a1和a2以及固定臂a3。成对车轮w1、w2和w3、连接臂a1和a2以及固定臂a3构成图1所示的行驶机构230的一部分。
83.注意,尽管图2和图3所示的递送车辆200是包括六个车轮w1、w2和w3的六轮车辆,但是它也可以是四轮车辆。也就是说,对递送车辆200的类型没有特别限制。
84.车轮w1可旋转地连接到连接臂a1的一端。连接臂a1的另一端可旋转地连接到固定臂a3的下端。
85.车轮w2可旋转地连接到连接臂a2的一端。连接臂a2的另一端可旋转地连接到固定臂a3的下端。
86.固定臂a3的上端被固定到递送车辆200的主体。车轮w3可旋转地连接到固定臂a3的下端。
87.如图2所示,递送车辆200能够通过使用四个车轮——即,成对车轮w1和w2——来行驶。然而,如图3所示,递送车辆200也能够通过使用六个车轮——即,成对车轮w1、w2和w3——来行驶。通过使连接臂a1和a2围绕连接臂a1及a2和固定臂a3之间的连接部旋转,递送车辆200的姿态能够在图2所示的姿态与图3所示的姿态之间切换。
88.在图2所示的运输车辆100的仅四个车轮w1和w2与运输车辆100的地面接触的姿态中,与当递送车辆200处于六个车轮w1、w2和w3与地面接触的姿态时占据的面积相比,能够减小地面上由递送车辆200占据的面积。然而,由于递送车辆200的重心在图3所示的姿态下较高,所以递送车辆200更可能翻倒。
89.因此,当运输车辆100已突然加速或减速时,递送车辆200可以采取递送车辆200不太可能翻倒的姿态。例如,行驶控制单元210控制行驶机构230,使得递送车辆200采取如图3所示重心较低的姿态,而不是采取如图2所示重心较高的姿态。也就是说,行驶控制单元210控制行驶机构230以便降低递送车辆200的重心。以这种方式,可以有效地防止诸如递送车辆200由于运输车辆100的突然加速或减速而翻倒的问题这样的问题。
90.此外,在图3所示的姿态下,由于递送车辆200在横向方向上的宽度比其在纵向方向上的长度短,所以递送车辆200更可能在横向方向上翻倒而不是在纵向方向上翻倒。因此,当运输车辆100已突然加速或减速时,可以操作车轮w1、w2和w3的转向机构(未示出),使得递送车辆200的纵向方向与运输车辆100的纵向方向一致。如上所述,车轮w1、w2和w3的转向机构被包括在行驶机构230中。
91.以这种方式,可以更有效地防止诸如递送车辆200由于运输车辆100的突然加速或减速而翻倒的问题这样的问题。
92.此外,当运输车辆100已突然加速或减速时,可以操作车轮w1、w2和w3的制动机构(未示出)。如上所述,车轮w1、w2和w3的制动机构被包括在行驶机构230中。
93.以这种方式,可以防止或减小递送车辆200的意外位移(意外移动)。
94.此外,可以主动地驱动成对车轮w1、w2和w3中的至少一对以便抵消被预测为在运输车辆100突然加速或减速时发生的递送车辆200的位移。也就是说,可以操作车轮w1、w2和w3的驱动机构(未示出),使得递送车辆200在与预测位移相反的方向上移动。如上所述,车轮w1、w2和w3的驱动机构被包括在行驶机构230中。
95.以这种方式,可以更进一步地防止或减小递送车辆200的意外位移(意外移动)。
96.(第二实施例)
97.接下来,将参考图4至图6描述根据第二实施例的递送系统和递送方法。图4是根据第二实施例的递送系统的框图。图5和图6是示出设置在运输车辆100内部的操纵器400的侧视图。如图4至图6所示,代替第一实施例中的递送车辆200,根据第二实施例的递送系统包括操纵器400。
98.操纵器400布置在运输车辆100内部并且在运输车辆100内部搬运物品。
99.如图1所示,操纵器400包括操作控制单元410、传感器单元420和操作机构430。此外,操纵器400无线地或通过电缆连接到运输车辆100和管理服务器300以便能够与它们进行通信。
100.操作控制单元410基于从传感器单元420获取的各种类型的信息来控制操作机构430。也就是说,操纵器400随着操作控制单元410控制操作机构430而被操作(即,操纵)。注意,类似于运输车辆100的传感器单元120,传感器单元420包括各种类型的传感器。
101.此外,在根据此实施例的递送系统中,操作控制单元410从运输车辆100的行驶控制单元110获取关于运输车辆100的加速度的信息。基于此信息预测由于运输车辆100的加速度而在操纵器400中发生的位移,并且控制操作机构430使得位移减小。也就是说,操纵器400的操作被控制。
102.因此,在运输车辆100中设置的操纵器400中,可以防止否则由于运输车辆100的突然加速或减速而将发生的问题。
103.在图5所示的示例中,操作机构430包括基部31、连杆基部32、第一连杆33、第二连杆34和末端执行器35。操纵器400通过使用末端执行器35来抓握物品并搬运所抓握的物品。
104.注意,对末端执行器35的配置没有限制,只要末端执行器35能够搬运物品即可。例如,操纵器400可以通过使用末端执行器35来吸取物品并搬运所吸取的物品。此外,尽管在图5所示的示例中连杆机构由两个连杆——即,第一连杆33和第二连杆34——构成,但是连杆机构可以由三个或更多个连杆构成。
105.基部31被固定到运输车辆100的地面。
106.连杆基部32通过旋转轴32a连接到基部31,使得连杆基部32能够围绕旋转轴32a旋转。连杆基部32的旋转轴32a是与运输车辆100的地面垂直的轴。连杆基部32由电动机等(未示出)旋转地驱动。
107.第一连杆33通过设置在第一连杆33的后端处的第一关节部33a可旋转地连接到连杆基部32。此外,第二连杆34通过设置在第二连杆34的后端处的第二关节部34a可旋转地连接到第一连杆33的前端。末端执行器35连接到第二连杆34的前端。
108.注意,第一关节部33a和第二关节部34a的旋转轴与运输车辆100的地面平行。能够通过使第一连杆33和第二连杆34旋转来改变末端执行器35的高度。第一连杆33和第二连杆34中的每一个由电动机等(未示出)旋转地驱动。通过上述配置,操纵器400能够通过使用末端执行器35来抓握并搬运物品。
109.如图5所示,作用在连杆基部32的旋转轴32a上的力矩在第一连杆33和第二连杆34在与运输车辆100的地面平行的方向上延伸的状态下增加。因此,当运输车辆100已突然加速或减速时,很可能在末端执行器35中发生意外位移。
110.相比之下,在图6中,第一连杆33和第二连杆34被折叠以便彼此重叠(例如,以便彼此对齐),并且第一连杆33和第二连杆34与连杆基部32的旋转轴32a平行地延伸。因此,与在图5所示的姿态下发生的力矩相比,可以减小作用在连杆基部32的旋转轴32a上的力矩,从而防止或减小末端执行器35的意外位移(意外移动)。
111.此外,当运输车辆100已突然加速或减速时,可以操作连杆基部32、第一连杆33和第二连杆34的制动机构(未示出)。如上所述,连杆基部32、第一连杆33和第二连杆34的制动
机构被包括在图4所示的操作机构430中。
112.以这种方式,可以防止或减小末端执行器35——即,操纵器400——的意外位移(意外移动)。
113.此外,可以主动地驱动连杆基部32、第一连杆33和第二连杆34中的至少一个,使得当运输车辆100已突然加速或减速时,末端执行器35在与施加在末端执行器35上的力的方向相反的方向上移动。也就是说,可以操作连杆基部32、第一连杆33和第二连杆34的驱动机构(未示出)。连杆基部32、第一连杆33和第二连杆34的驱动机构被包括在图4所示的操作机构430中。
114.以这种方式,可以更进一步地防止或减小末端执行器35——即,操纵器400——的意外位移(意外移动)。
115.如上所述,在根据此实施例的递送系统中,操作控制单元410从运输车辆100的行驶控制单元110获取关于运输车辆100的加速度的信息。然后,基于此信息预测由于运输车辆100的加速度而在操纵器400中发生的位移,并且控制操纵器400的操作使得位移减小。因此,在运输车辆100中设置的操纵器400中,可以防止否则由于运输车辆100的突然加速或减速而将发生的问题。
116.配置的其余部分类似于第一实施例的配置,因此省略其描述。
117.注意,此实施例和第一实施例可以彼此组合。也就是说,除了图1所示的运输车辆100、递送车辆200和管理服务器300之外,递送系统可以包括图4所示的操纵器400。替换地,递送车辆200可以包括操纵器400。
118.在上述示例中,程序包括指令(或软件代码),当被加载到计算机中时,这些指令(或软件代码)使计算机执行实施例中描述的功能中的一个或多个。程序可以被存储在非暂时性计算机可读介质或有形存储介质中。作为示例而非限制,非暂时性计算机可读介质或有形存储介质能够包括随机存取存储器(ram)、只读存储器(rom)、闪速存储器、固态驱动器(ssd)或其他类型的存储器技术、cd-rom、数字通用盘(dvd)、蓝光盘或其他类型的光盘存储装置以及磁盒、磁带、磁盘存储装置或其他类型的磁存储设备。可以在暂时性计算机可读介质或通信介质上发送程序。作为示例而非限制,暂时性计算机可读介质或通信介质能够包括电信号、光信号、声信号或其他形式的传播信号。
119.根据如此描述的公开内容,将显然的是,可以以许多方式改变本公开的实施例。此类变化不应被视为脱离本公开的精神和范围,并且如对于本领域的技术人员而言将显然的,所有此类修改旨在包括在以下权利要求的范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。