1.本公开涉及一种对基板进行预定的作业的对基板作业机。
背景技术:
2.以往,关于上述对基板作业机,提出了各种技术。
3.例如,下述专利文献1所记载的技术是一种元件安装装置,至少包括基板供给单元、焊料层形成单元以及固定单元,构成预定的电气元件向基板安装的安装线,该基板供给单元供给具有由导电性金属构成的预定的布线图案的基板,该焊料层形成单元在所述布线图案的预定的区域形成焊料层,该固定单元为了通过软钎焊将所述电气元件安装于所述基板而利用所述焊料层将电气元件相对于所述基板进行固定,该元件安装装置的特征在于,至少在所述布线图案的形成有焊料层的区域组装有在大气压下照射等离子体的等离子体照射装置。
4.根据该结构,在构成至少进行焊料层向基板的形成、电气元件向基板的固定以及软钎焊的元件安装线的元件安装装置中,由于组装有在大气压下照射等离子体的等离子体照射装置,因此能够在对基板进行一系列的处理的一个阶段中向布线图案的形成有焊料层的区域照射等离子体而进行表面改性。通过该等离子体照射,能够实现焊料被粘接面的清洁化以及润湿性改善,因此能够不使用助焊剂而进行焊接。
5.现有技术文献
6.专利文献
7.专利文献1:日本特开2007-299822号公报
技术实现要素:
8.发明所要解决的课题
9.然而,更理想的是期望对基板照射等离子体。
10.本公开就是鉴于上述的点而完成的,其课题在于提供一种适合向基板照射等离子体的对基板作业机。
11.用于解决课题的技术方案
12.本说明书公开了一种对基板作业机,对基板进行预定的作业,该对基板作业机具备:等离子体单元,产生等离子体;存储装置,存储有条件数据;以及控制装置,基于条件数据来调整由等离子体单元向基板照射的等离子体的照射量。
13.发明效果
14.根据本公开,对基板作业机向基板照射等离子体是较为理想的。
附图说明
15.图1是装配机的立体图。
16.图2是装配机的俯视图。
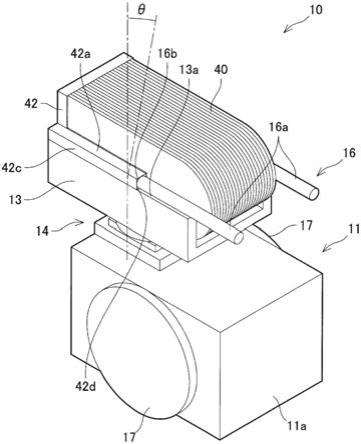
17.图3是装配头的立体图。
18.图4是电子元件装配装置的俯视图。
19.图5是电子元件装配装置中的控制装置的框图。
20.图6是贮存托盘中的转印作业的说明图。
21.图7是贮存托盘中的转印作业的说明图。
22.图8是贮存托盘中的转印作业的说明图。
23.图9是电路基板中的转印作业的说明图。
24.图10是电路基板中的转印作业的说明图。
25.图11是电路基板中的转印作业的说明图。
26.图12是数据表的概念图。
27.图13是表示照射作业的流程的流程图。
28.图14是电子元件装配装置的俯视图。
29.图15是电子元件装配装置中的控制装置的框图。
具体实施方式
30.以下,参照附图对将本公开所涉及的对基板作业装置具体化为电子元件装配装置10的一个实施方式进行说明。
31.如图1以及图2所示,本实施方式所涉及的电子元件装配装置10是用于向电路基板安装电子元件的装置。电子元件装配装置10具有一个系统基座14和在该系统基座14上排列配设的两个装配机16。此外,在以下的说明中,将装配机16的排列方向称为x轴方向,将与该方向成直角的水平方向称为y轴方向。
32.各装配机16主要具备装配机主体20、第一搬运装置22、装配头移动装置24(以下,有时简称为移动装置24)、装配头26、供给装置28、助焊剂单元30、操作装置200、第一等离子体单元202以及转印针托盘204。装配机主体20由框架部32和架设在该框架部32上的梁部34构成。
33.第一搬运装置22具备两个传送装置(传送装置40、传送装置42)。传送装置40以及传送装置42以相互平行且沿x轴方向延伸的方式配设于框架部32。传送装置40、传送装置42通过电磁马达46(参照图5)将各自支撑的电路基板沿x轴方向搬运。另外,电路基板在预定的作业位置被基板保持装置48(参照图5)固定地保持。
34.移动装置24是xy机器人型的移动装置,具备使滑动件50沿x轴方向滑动的电磁马达52(参照图5)和沿y轴方向滑动的电磁马达54(参照图5)。在滑动件50上装配有装配头26,该装配头26通过电磁马达52和电磁马达54的工作而向框架部32上的任意的位置移动。
35.装配头26用于将电子元件装配于电路基板。如图3所示,装配头26设于滑动件50,具备多个棒状的装配单元60,在多个装配单元60各自的前端部装配有吸嘴62。吸嘴62经由负压空气通路以及正压空气通路而与正负压供给装置66(参照图5)相通。吸嘴62通过负压吸附保持电子元件,通过正压使所保持的电子元件脱离。另外,多个棒状的装配单元60在单元保持体68的外周部以等角度间距配设,且被保持为轴向成为垂直的状态。吸嘴62从单元保持体68的下表面向下方延伸。此外,吸嘴62相对于各装配单元60的装配/更换等通过单触而自动地进行,但是由于是公知技术,因此省略其详细的说明。
36.另外,在该装配头26中,单元保持体68通过保持体旋转装置70的电磁马达72(参照图5),对应装配单元60的每个配设角度间歇旋转。由此,装配单元60依次停止在多个装配单元60的停止位置中的一个停止位置、即升降站。然后,位于该升降站的装配单元60通过单元升降装置74的电磁马达76(参照图5)而升降。由此,吸附保持于吸嘴62的电子元件的上下方向上的位置被变更。另外,在该装配头26中,与升降站不同的停止位置被设为自转站,位于该自转站的装配单元60通过自转装置78的电磁马达80(参照图5)而自转。由此,由吸嘴62吸附保持的电子元件的保持姿势被变更。
37.供给装置28是供料器型的供给装置,配设于框架部32的y轴方向上的一方的端部。供给装置28具有带式供料器81。带式供料器81以卷绕的状态收容有对电子元件进行编带而构成的带化元件。然后,带式供料器81通过送出装置82(参照图5)送出带化元件。由此,供料器型的供给装置28通过带化元件的送出而在供给位置供给电子元件。此外,带式供料器81能够相对于框架部32装卸,能够应对电子元件的更换等。
38.然后,助焊剂单元30在供给装置28的旁边以能够沿y轴方向滑动的方式配设,具有贮存涂布于电子元件的助焊剂的贮存托盘93等。贮存托盘93是从上方观察的外形形状呈圆形的浅底的托盘,贮存助焊剂,通过托盘旋转装置90(参照图5)而向预定方向旋转。由此,在贮存托盘93上,利用刮板(省略图示)均匀地推开助焊剂,形成助焊剂膜。
39.操作装置200由触摸面板等构成,配设于装配机16的前侧上方,显示装配机16的动作信息等,接收来自操作者等的指示。
40.第一等离子体单元202配设于供给装置28与传送装置40之间,呈立方体形状,具有照射等离子体的内部空间。在第一等离子体单元202的上表面设有与内部空间相连的孔部h。由此,第一等离子体单元202能够对从孔部h插入到内部空间的物体照射预定强度的等离子体。此外,等离子体的照射量以插入到第一等离子体单元202的孔部h的时间来进行调整。
41.转印针托盘204配设于焊剂单元30与传送装置40之间,收容有三个转印针p。各转印针p是各自的材质不同的棒状的部件,以其轴向成为垂直的状态被收容于转印针托盘204。各转印针p在将助焊剂单元30的助焊剂向电路基板转印时被使用。此时,各转印针p取代吸嘴62而装配于装配头26的装配单元60。此外,转印针p相对于装配单元60的装卸等与吸嘴62相同,通过单触而自动地进行,但是由于是公知技术,因此省略其详细的说明。
42.如图4所示,电子元件装配装置10具有第二搬运装置210和第二等离子体单元220。第二搬运装置210具备两个传送装置(传送装置214、传送装置216)。传送装置214以及传送装置216以相互平行且沿x轴方向延伸、且与各装配机16所具有的第一搬运装置22的传送装置40以及传送装置42连接的方式配置。传送装置214以及传送装置216通过电磁马达212(参照图5)将各自支撑的电路基板c沿与x轴方向平行的行进方向x1搬运。由此,电路基板c从第二搬运装置210被移送到第一搬运装置22。
43.第二等离子体单元220是向其下方照射等离子体的装置。第二等离子体单元220沿y轴设置,与第二搬运装置210在其上方立体交叉,从而与第二搬运装置210的传送装置214和传送装置216正交。由此,第二等离子体单元220能够对利用第二搬运装置210通过其下方的电路基板c照射预定强度的等离子体。此外,等离子体的照射量根据通过第二等离子体单元220的下方的速度、即第二搬运装置210中的朝向行进方向x1的搬运速度来进行调整。
44.如图5所示,电子元件装配装置10还具备控制装置100。控制装置100具有控制器
102,控制器102具备cpu、rom、ram等,以计算机为主体。控制器102与多个驱动电路106连接,这些多个驱动电路106与电磁马达46、电磁马达52、电磁马达54、电磁马达72、电磁马达76、电磁马达80、基板保持装置48、正负压供给装置66、送出装置82、托盘旋转装置90连接。由此,第一搬运装置22、移动装置24、装配头26、带式供料器81以及助焊剂单元30等的工作由控制器102来控制。
45.控制器102与控制电路107连接,具备存储器230。控制电路107使操作装置200的触摸面板显示与控制器102的cpu的命令相应的图像,并将操作装置200的触摸面板等接收到的信息作为信号向控制器102的cpu输出。存储器230是闪存。在存储器230中设有后述的数据库232。
46.进而,多个驱动电路106与第一等离子体单元202、第二等离子体单元220以及电磁马达212连接。由此,第一等离子体单元202、第二等离子体单元220以及第二搬运装置210等的工作由控制器102来控制。
47.在电子元件装配装置10中,通过上述结构,对保持于第一搬运装置22的电路基板c进行装配头26的装配作业。具体而言,根据控制器102的指令,电路基板c被第一搬运装置22搬运至作业位置,在该位置被基板保持装置48保持。另外,带式供料器81根据控制器102的指令,通过送出装置82送出带化元件,在供给位置供给电子元件。然后,装配头26通过移动装置24等向电子元件的供给位置的上方移动,通过吸嘴62对电子元件进行吸附保持。接着,装配头26向电路基板c的上方移动,将所保持的电子元件向电路基板c上装配。
48.在电子元件装配装置10中,以最佳地进行上述安装作业为目的,在进行上述装配作业之前,进行转印作业。在转印作业中,通过装配头26以及转印针p将助焊剂f转印到电路基板c。具体而言,如图6所示,转印针p的上端部安装于装配头26。由此,转印针p以其轴向成为垂直的状态装配于装配头26。进而,装配头26通过移动装置24等向贮存托盘93的上方移动。由此,转印针p在贮存有助焊剂f的贮存托盘93中位于助焊剂膜300的上方。接着,如图7以及图8所示,装配头26通过移动装置24等而下降以及上升。由此,由于转印针p的下端部浸渍于助焊剂膜300,因此助焊剂f被转印到转印针p的下端部。
49.然后,如图9所示,装配头26通过移动装置24等向电路基板c的上方移动。由此,转印针p以助焊剂f被转印到其下端部的状态向电路基板c的上方移动。接着,如图10以及图11所示,装配头26通过移动装置24等而下降以及上升。由此,由于转印针p的下端部接近电路基板c,因此助焊剂f被转印到电路基板c。
50.进而,在电子元件装配装置10中,为了使转印到转印针p的助焊剂f的量和转印到电路基板c的助焊剂f的量稳定,在进行上述转印作业之前,进行照射作业。在照射作业中,利用第一等离子体单元202对转印针p进行等离子体照射,利用第二等离子体单元220对电路基板c进行等离子体照射。在照射等离子体时,基于存储于数据库232的信息来调整等离子体的照射量。由此,转印针p和电路基板c各自的表面自由能近似于助焊剂f的表面自由能。
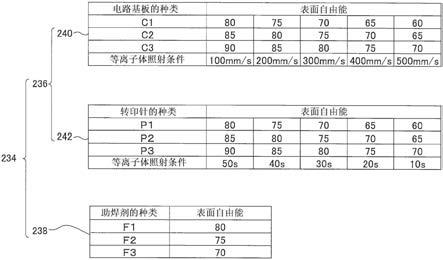
51.在存储于数据库232的信息中例如具有图12所示的数据表234。数据表234具有第一数据表236和第二数据表238。第一数据表236由电路基板用表240和转印针用表242构成。
52.在电路基板用表240中,表面自由能的值与电路基板c的种类以及等离子体照射条件建立关联并被存储。附加于电路基板c的符号的数字表示电路基板c的种类。因而,在电路
基板用表240中,作为电路基板c的种类,存在有电路基板c1、c2、c3。电路基板用表240中的等离子体照射条件是以基于第二等离子体单元220的等离子体照射为对象的条件,由第二搬运装置210中的朝向行进方向x1的搬运速度(即,电路基板c通过第二等离子体单元220的下方的速度)表示。由此,在某等离子体照射条件下电路基板c通过第二等离子体单元220的下方时,电路基板c的表面自由能成为与该等离子体照射条件建立了关联的值。
53.例如,在各电路基板c1、c2、c3以100mm/s(等离子体照射条件)通过了第二等离子体单元220的下方的情况下,各电路基板c1、c2、c3的表面自由能大致成为80、85、90。若等离子体照射条件(第二搬运装置210中的朝向行进方向x1的搬运速度)变快,则电路基板c通过第二等离子体单元220的下方的时间变短,基于第二等离子体单元220的等离子体的照射量变少,因此表面自由能的值变小。
54.转印针用表242的表面自由能的值与转印针p的种类以及等离子体照射条件建立关联并被存储。附加于转印针p的符号的数字表示转印针p的种类。因而,在转印针用表242中,作为转印针p的种类,存在有转印针p1、p2、p3。转印针用表242中的等离子体照射条件是以基于第一等离子体单元202的等离子体照射为对象的条件,以由转印针p插入到第一等离子体单元202的孔部h的时间(秒)来表示。由此,当转印针p在某等离子体照射条件下插入到第一等离子体单元202的孔部h时,转印针p的表面自由能成为与该等离子体照射条件建立了关联的值。
55.例如,在各转印针p1、p2、p3插入到第一等离子体单元202的孔部h的状态被维持在50s(等离子体照射条件)的情况下,各转印针p1、p2、p3的表面自由能大致成为80、85、90。若等离子体照射条件(转印针p插入到第一等离子体单元202的孔部h的时间)变短,则转印针p存在于照射有等离子体的第一等离子体单元202的内部空间的时间变短,因此表面自由能的值变小。
56.在第二数据表238中,助焊剂f所具有的表面自由能的值与助焊剂f的种类建立关联并被存储。附加于助焊剂f的符号的数字表示助焊剂f的种类。因而,在第二数据表238中,作为助焊剂f的种类,存在有助焊剂f1、f2、f3。
57.接着,除了数据表234以外,还参照图13所示的流程图对在电子元件装配装置10中进行的照射作业进行说明。图13的流程图所示的控制程序由s10至s16的各处理构成,存储于控制器102的rom,在进行照射作业时,由控制器102的cpu来执行。另外,除了存储于存储器230的数据库232(即,数据表234)以外,在图13的流程图所示的控制程序中使用的各种数据还存储于控制器102的rom或者ram等中。
58.在决定处理s10中,设定转印针p、电路基板c以及助焊剂f各自的种类。该设定例如是通过操作装置200接收来自操作者等的指示来进行的。操作者等指示在照射作业后的转印作业中使用的转印针p、电路基板c以及助焊剂f各自的种类。
59.此外,以下,在使用具体例进行说明的情况下,通过该决定处理s10,将转印针p2、电路基板c3以及助焊剂f1设定为转印针p、电路基板c以及助焊剂f各自的种类。
60.进而,在决定处理s10中,基于该设定的助焊剂f的种类和数据表234,决定在后述的检索处理s12中使用的表面自由能。在具体例中,在数据表234的第二数据表238中,将与助焊剂f1建立了关联的80的值决定为表面自由能。
61.在检索处理s12中,通过在上述决定处理s10中设定的转印针p以及电路基板c各自
的种类和在上述决定处理s10中决定的表面自由能,从数据表234的第一数据表236中检索转印针p的照射条件和电路基板c的照射条件。
62.在具体例中,在第一数据表236的转印针用表242中,作为转印针p的照射条件,找出与在上述决定处理s10中设定的转印针p2和在上述决定处理s10中决定的表面自由能的值即80建立了关联的40s。另外,在第一数据表236的电路基板用表240中,作为电路基板c的照射条件,找出与在上述决定处理s10中设定的电路基板c3以及在上述决定处理s10中决定的表面自由能的值即80建立了关联的300mm/s。
63.在转印针照射处理s14中,在上述检索处理s12中检索到的转印针p的照射条件下,将来自第一等离子体单元202的等离子体向转印针p照射,从而使转印针p的表面自由能近似于助焊剂f的表面自由能。
64.在具体例中,装配头26从转印针托盘204装配转印针p2,将转印针p2插入到第一等离子体单元202的孔部h,将该插入的状态维持在40s之间。由此,装配于装配头26的转印针p2的表面自由能的值近似于助焊剂f1的表面自由能的值即80。
65.在基板照射处理s16中,在上述检索处理s12中检索出的电路基板c的照射条件下,将来自第二等离子体单元220的等离子体向电路基板c照射,从而使电路基板c的表面自由能近似于助焊剂f的表面自由能。
66.在具体例中,电路基板c3以通过第二等离子体单元220的下方的方式被支撑于第二搬运装置210的传送装置214或者传送装置216。进而,第二搬运装置210中的朝向行进方向x1的搬运速度、即电路基板c3通过第二等离子体单元220的下方的速度为300mm/s。由此,由第二搬运装置210搬运的电路基板c3的表面自由能的值近似于助焊剂f1的表面自由能的值即80。
67.此外,基板照射处理s16可以与转印针照射处理s14同时进行,也可以先于转印针照射处理s14进行。
68.之后,进行上述转印作业。在具体例中,使用从第二搬运装置210转移到第一搬运装置22的电路基板c3和装配于装配头26的转印针p2,进行上述转印作业,此时,助焊剂f1贮存于贮存托盘93。
69.如以上详细说明的那样,本实施方式的电子元件装配装置10对电路基板c照射等离子体是较为理想的。
70.顺便说一下,在本实施方式中,电子元件装配装置10是对基板作业机的一个例子。第一等离子体单元202和第二等离子体单元220是等离子体单元的一个例子。第二搬运装置210是搬运装置的一个例子。存储器230是存储装置的一个例子。存储于数据库232的信息是条件数据的一个例子。电路基板c是基板的一个例子。助焊剂f是转印剂的一个例子。
71.此外,本公开并不限定于上述实施方式,在不脱离其主旨的范围内能够进行各种变更。
72.例如如图14所示,第二等离子体单元220也可以设于等离子体单元移动装置400。以下,参照图14对等离子体单元移动装置400进行说明。但是,对与上述实施方式实质上共通的部分标注相同的附图标记,省略详细的说明。
73.等离子体单元移动装置400是xy机器人型的移动装置,具备x轴滑动机构410和y轴滑动机构420。x轴滑动机构410具有x轴滑轨412和x轴滑动件414。x轴滑轨412以沿x轴方向
延伸的方式沿第二搬运装置210的传送装置214以及传送装置216设置。x轴滑动件414被x轴滑轨412保持为能够沿x轴方向滑动。进而,x轴滑动机构410具有电磁马达(省略图示),通过该电磁马达的驱动,x轴滑动件414向x轴方向的任意的位置移动。
74.另外,y轴滑动机构420具有y轴滑轨422。y轴滑轨422沿y轴设置,与第二搬运装置210在其上方立体交叉,从而与第二搬运装置210的传送装置214以及传送装置216正交。y轴滑轨422的一端部与x轴滑动件414连结。因此,y轴滑轨422被设为能够沿x轴方向移动。然后,在y轴滑轨422的下侧以能够沿y轴方向滑动的方式保持有第二等离子体单元220。进而,y轴滑动机构420具有电磁马达(省略图示),通过该电磁马达的驱动,第二等离子体单元220向y轴方向上的任意的位置移动。由此,第二等离子体单元220能够通过x轴滑动机构410以及y轴滑动机构420的驱动而向第二搬运装置210上的任意的位置移动,并且能够在第二搬运装置210上通过。
75.由此,第二等离子体单元220能够对第二搬运装置210上的电路基板c照射等离子体。等离子体的照射量是根据第二等离子体单元220的移动速度来调整的。
76.例如,在第二搬运装置210停止的状态下,根据x轴滑动件414在x轴滑轨412上滑动的速度和第二等离子体单元220在y轴滑轨422上滑动的速度来调整对第二搬运装置210上的电路基板c的等离子体照射量。另外,在第二搬运装置210停止的状态下,在以y轴滑轨422位于电路基板c的上方的方式使x轴滑动件414的位置固定的情况下,根据第二等离子体单元220在y轴滑轨422上滑动的速度来调整对该电路基板c的等离子体照射量。
77.与此相对地,在第二搬运装置210进行驱动的状态下,根据x轴滑动件414在x轴滑轨412上滑动的速度、第二等离子体单元220在y轴滑轨422上滑动的速度、第二搬运装置210中的朝向行进方向x1的搬运速度来调整对第二搬运装置210上的电路基板c的等离子体照射量。另外,在第二搬运装置210进行驱动的状态下,在使x轴滑动件414的位置固定的情况下,根据第二等离子体单元220在y轴滑轨422上滑动的速度和第二搬运装置210中的朝向行进方向x1的搬运速度来调整对第二搬运装置210上的电路基板c的等离子体照射量。
78.顺便说一下,在上述变更例中,等离子体单元移动装置400是移动装置的一个例子。
79.另外,如图15所示,数据库232(即,数据表234)也可以设于服务器244。以下,参照图15等对服务器244进行说明。但是,对与上述实施方式实质上共通的部分标注相同的附图标记,省略详细的说明。
80.服务器244经由通信电路108而与控制器102连接。由此,控制器102的cpu能够与服务器244进行通信。进而,控制器102的cpu如以下那样改变并进行决定处理s10以及检索处理s12。
81.在决定处理s10中,控制器102的cpu将包含在本决定处理s10中设定的助焊剂f、转印针p以及电路基板c各自的种类的第一信息向服务器244发送。服务器244基于在第一信息中包含的助焊剂f的种类和数据表234的第二数据表238来决定表面自由能。
82.在检索处理s12中,服务器244通过服务器244自身决定的表面自由能和在第一信息中包含的转印针p以及电路基板c各自的种类,从数据表234的第一数据表236中检索转印针p的照射条件和电路基板c的照射条件。进而,服务器244将包含服务器244自身检索到的转印针p以及电路基板c各自的照射条件的第二信息向控制器102发送。
83.之后,控制器102的cpu在第二信息中包含的转印针p的照射条件下执行转印针照射处理s14,在第二信息中包含的电路基板c的照射条件下执行基板照射处理s16。
84.顺便说一下,在上述变更例中,服务器244是外部设备的一个例子。
85.此外,服务器244可以是控制电子元件装配装置10的上位计算机,也可以由云计算提供的。
86.另外,也可以取代服务器244而将上述存储器230作为外部设备,由局域网、云计算等提供。在这样的情况下,控制器102的cpu在决定处理s10以及检索处理s12中经由通信电路108访问存储器230的数据库232。
87.另外,与上述实施方式不同,在转印针p被第二搬运装置210搬运到各装配机16的情况下,也可以在其搬运过程中,利用第二等离子体单元220进行等离子体照射。
88.另外,电路基板c与上述实施方式不同,也可以在第一搬运装置22上进行等离子体照射。但是,在这样的情况下,通过能够装卸地装配于装配头26的等离子体单元而对第一搬运装置22上的电路基板c照射等离子体。此外,该等离子体单元也可以对收容于转印针托盘204的各转印针p照射等离子体。
89.另外,在上述实施方式中,作为转印剂使用了助焊剂f,但是也可以取代助焊剂f而使用银膏或者熔融焊料等。
90.附图标记说明
91.10:电子元件装配装置、100:控制装置、108:通信电路、202:第一等离子体单元、210:第二搬运装置、220:第二等离子体单元、230:存储器、232:数据库、234:数据表、236:第一数据表、238:第二数据表、244:服务器、400:等离子体单元移动装置、c:电路基板、f:助焊剂、p:转印针、s10:决定处理、s12:检索处理、s14:转印针照射处理、s16:基板照射处理。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。