磁盘装置
1.本技术享受以日本专利申请2020-157429号(申请日:2020年9月18日)为基础申请的优先权。本技术通过参照该基础申请而包含基础申请的全部内容。
技术领域
2.本实施方式涉及磁盘装置。
背景技术:
3.在磁盘装置中,磁头对磁盘进行数据的写入及数据的读取。希望合适地控制磁头的动作。
技术实现要素:
4.一个实施方式提供一种能够合适地控制磁头的动作的磁盘装置。
5.根据一个实施方式,磁盘装置具备磁盘、磁头和控制器。磁盘具有多个磁道。磁头对多个磁道进行读取/写入。控制器,在执行对多个磁道中的第1磁道的写入的期间、磁头的位置从与第1磁道相关(第1磁道所涉及)的目标位置向第2磁道侧变动而第1距离超过了第1阈值的第1情况下,以与第1距离不足第1阈值的第2情况不同的条件,控制对第2磁道的写入。此外,第2磁道是多个磁道中的与第1磁道不同的磁道。另外,第1距离是从目标位置到磁头的位置的距离。
附图说明
6.图1是示出第1实施方式的磁盘装置的构成的一例的示意性的图。
7.图2是示出第1实施方式的磁盘的构成的一例的示意性的图。
8.图3是用于说明写入数据时的第1实施方式的磁头的动作的一例的示意性的图。
9.图4是用于说明第1实施方式的wos的设定方法的示意性的图。
10.图5是用于说明第1实施方式的写入的动作的流程图。
11.图6是用于说明第1实施方式的wos的变更相关的一系列的动作的流程图。
12.图7是用于说明第1实施方式的wos的设定方法的另一例的示意性的图。
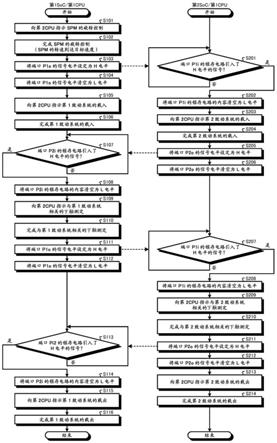
13.图8是用于说明第2实施方式的振动衰减阈值的变更相关的一系列的动作的流程图。
14.图9是用于说明第3实施方式的寻道速度的变更相关的一系列的动作的流程图。
具体实施方式
15.以下,参照附图,对实施方式的磁盘装置进行详细说明。此外,本发明不受这些实施方式所限定。
16.(第1实施方式)
17.图1是示出第1实施方式的磁盘装置1的构成的一例的示意性的图。
18.磁盘装置1连接于主机2。磁盘装置1能够从主机2接收写入命令、读取命令等访问命令。
19.磁盘装置1具备在表面形成有记录面的磁盘11。磁盘装置1根据访问命令,对磁盘11(更准确地说是磁盘11的记录面)进行数据的写入及数据的读取。此外,磁盘装置1可具有多张磁盘11,但在实施方式中,为了简化说明及图示,设为磁盘装置1具备1张磁盘11。
20.数据的写入及读出经由磁头22进行。具体地说,磁盘装置1除了磁盘11之外,还具备主轴马达12、马达驱动器ic(integrated circuit,集成电路)21、磁头22、致动器臂15、音圈马达(vcm)16、斜坡13、头ic24、读写通道(rwc)25、ram27、from(flash read only memory,闪速只读存储器)28、缓冲存储器29、硬盘控制器(hdc)23及处理器26。
21.磁盘11通过安装于磁盘11的旋转轴的主轴马达12而以预定的旋转速度旋转。主轴马达12由马达驱动器ic21驱动。
22.马达驱动器ic21控制主轴马达12的旋转及vcm16的旋转。
23.磁头22通过其所具备的写入元件22w及读取元件22r,对磁盘11进行数据的写入及数据的读取。另外,磁头22安装于致动器臂15的前端。磁头22通过由马达驱动器ic21驱动的vcm16,沿着磁盘11的径向移动。
24.在磁盘11的旋转停止时等,磁头22移动到斜坡13上。斜坡13构成为将磁头22保持在从磁盘11离开了的位置。
25.头ic24在读出时,将磁头22从磁盘11读出的信号放大并输出,向rwc25供给。另外,头ic24将从rwc25供给的与写入对象的数据对应的信号放大,向磁头22供给。
26.hdc23进行经由i/f总线而与主机2之间进行的数据的收发的控制、缓冲存储器29的控制以及读出的数据的纠错处理等。
27.缓冲存储器29被用作与主机2之间收发的数据的缓冲器。例如,缓冲存储器29用于暂时存储要向磁盘11写入的数据或从磁盘11读出的数据。
28.缓冲存储器29例如由能够进行高速动作的易失性存储器构成。构成缓冲存储器29的存储器的种类不限定于特定的种类。缓冲存储器29例如可由dram(dynamic random access memory,动态随机存取存储器)、sram(static random access memory,静态随机存取存储器)或它们的组合构成。
29.rwc25将从hdc23供给的写入对象的数据调制而向头ic24供给。另外,rwc25将从磁盘11读出并从头ic24供给的信号解调而作为数字数据向hdc23输出。
30.处理器26例如是cpu(central processing unit,中央处理单元)。在处理器26连接有ram27、from(flash read only memory)28及缓冲存储器29。
31.from28是非易失性存储器。在from28储存固件(程序数据)及各种动作参数等。此外,固件也可以储存于磁盘11。
32.ram27例如由dram、sram或它们的组合构成。ram27由处理器26作为动作用的存储器而使用。ram27作为加载固件的区域、保持各种管理数据的区域而使用。
33.处理器26按照储存于from28或磁盘11的固件而进行该磁盘装置1的整体的控制。例如,处理器26从from28或磁盘11将固件加载到ram27,按照所加载的固件,执行马达驱动器ic21、头ic24、rwc25、hdc23等的控制。
34.此外,包含rwc25、处理器26及hdc23的构成也可以视为控制器30。控制器30也可以
除了这些之外,还包含其他要素(例如ram27、from28、缓冲存储器29或rwc25等)。
35.图2是示出第1实施方式的磁盘11的构成的一例的示意性的图。
36.在制造工序中,例如通过伺服写入器或通过自伺服写入(ssw),向磁盘11写入伺服信息。根据图2,作为被写入了伺服信息的伺服区域的配置的一例,示出了呈放射状配置的伺服区域42。
37.伺服信息包含扇区/柱面信息、脉冲串图案(burst pattern)及后置码(post code)等。扇区/柱面信息能够给出磁盘11的圆周方向的伺服地址(伺服扇区地址)及半径方向的伺服地址(磁道地址)。在磁盘装置1动作时,扇区/柱面信息被用于使磁头22移动至目标磁道的寻道动作的控制。
38.脉冲串图案定义多个磁道各自的位置。更详细地说,脉冲串图案定义各磁道。在此,由脉冲串图案定义的磁道的位置,存在因伺服信息的写入误差等而从实际的磁道的位置偏移的情况。该位置偏移,以磁盘(及主轴马达)旋转1周为周期,反复相同地发生,所以被称作rro。在制造工序中,按每个磁道学习rro,rro的学习值作为后置码向磁盘11写入。并且,在磁盘装置1的使用时,在将磁头22定位于目标的磁道时,执行基于后置码消除由rro导致的位置偏移的控制。
39.此外,根据图2,通过脉冲串图案和后置码,设定了同心圆的多个磁道41。1个磁道41上的伺服区域42可称作伺服扇区。在各磁道41的周向上的伺服区域42(也就是说伺服扇区)之间,设置有可写入数据的数据区域43。在数据区域43,连续形成有多个数据扇区。对各数据扇区,由磁头22执行数据的写入及读取。
40.由磁头22(更准确地说是读取元件22r)读出的信号,包括从伺服扇区读出的伺服信息和从数据扇区读出的数据。由磁头22读出的伺服信息,由头ic24解调为表示磁头22距磁道的相对位置的位置误差信号,向控制器30供给。控制器30与马达驱动器ic21协作,执行基于被供给的位置误差信号的磁头22的定位控制。
41.例如,控制器30和马达驱动器ic21,执行基于位置误差信号使目标磁道的位置与磁头22的当前位置的差量接近零的反馈控制。
42.磁头22的移动动作大体上包括寻道动作和磁道跟踪(追随)动作。寻道动作是使磁头22朝向目标磁道在磁盘11的径向上移动的动作。磁道跟踪动作是在通过寻道动作使磁头22移动到目标磁道附近之后,将磁头22的位置维持在目标磁道上的动作。在磁道跟踪动作中,通过上述反馈控制调整磁头22的位置,以使得磁头22沿着目标磁道相对移动。将磁头22的位置被维持在目标磁道上的状态记载为在轨(on track)状态。
43.数据的写入及数据的读取,在磁头22处于在轨状态时执行。即,控制器30判定磁头22是否处于在轨状态,在磁头22处于在轨状态时,使用磁头22执行数据的写入或数据的读取。
44.磁头22是否处于在轨状态,基于将磁道的位置作为基准而设定的阈值来判断。例如,在写入的动作时用于在轨状态的判断的阈值被称作wos(write offtrack slice,写入偏轨切片)。
45.图3是用于说明写入数据时的第1实施方式的磁头22的动作的一例的示意性的图。此外,在提及径向的位置时,设为将磁盘11的内周侧视为正侧,将磁盘11的外周侧视为负侧。此外,关于径向的位置,将磁盘11的内周侧和外周侧中的哪一方视为正侧,这是能够由
设计者任意决定的。
46.图3中,作为多个伺服扇区(sevsct),描绘了伺服扇区#k-4~#k 2。另外,作为多个磁道中的1个,描绘了磁道#n的中心。并且,显示了对磁道#n执行了数据的写入时的磁头22的轨道(轨迹)。
47.在对磁道#n写入数据时,通过磁道跟踪动作调整磁头22的位置,以使得磁头22的位置与磁道#n的磁道中心的差量接近零。然而,磁头22的位置有可能因各种干扰而从目标位置变动。其结果,如图3所示,磁头22的轨道从磁道#n的中心变动。
48.关于各磁道,预先设定了写入数据时的磁头22的变动许可范围。规定变动许可范围的边界的线是wos。根据图3,在从磁道#n的中心向正侧离开了固定值l的位置设定有正侧的wos,在从磁道#n的中心向负侧离开了固定值l的位置设定有负侧的wos。
49.在执行对磁道#n的数据的写入的期间,每当磁头22通过伺服扇区时读取伺服信息,根据读出的伺服信息而生成的位置误差信号被向控制器30供给。控制器30每当取得位置误差信号时,基于所取得的位置误差信号推定磁头22是否处于变动许可范围内。
50.具体地说,控制器30基于位置误差信号,将磁头22的位置距磁道#n所涉及的目标位置(例如磁道#n的中心)的距离与相当于wos的阈值(图4的情况下是l)进行比较。在磁头22的位置距磁道#n所涉及的目标位置的距离超过了相当于wos的阈值的情况下,控制器30推定为磁头22脱离了变动许可范围。在磁头22的位置距磁道#n所涉及的目标位置的距离不足相当于wos的阈值的情况下,控制器30推定为磁头22处于变动许可范围内。磁头22的位置距磁道#n所涉及的目标位置的距离与相当于wos的阈值相等的情况下的处理是任意的。控制器30既可以推定为磁头22处于变动许可范围内,也可以推定为磁头22脱离了变动许可范围。
51.在推定为磁头22脱离了变动许可范围的情况下,磁头22不处于在轨状态,所以,控制器30停止对磁道#n的写入。
52.在停止了对磁道#n的写入之后,在磁盘11又旋转了一周而磁头22再次临近写入停止位置时,控制器30再次推定磁头22是否处于变动许可范围内。并且,在推定为磁头22处于变动许可范围内的情况下,控制器30再次开始对磁道#n的写入。该处理被称作写入重试。
53.在此,伺服信息在磁盘11的周向上离散地记录。因此,控制器30间歇地取得位置误差信号。另外,在从通过磁头22读取伺服信息起到控制器30取得并使用位置误差信号为止的期间,存在一些滞后。
54.因此,控制器30难以完全防止磁头22脱离可变动范围。在磁头22通过了伺服扇区的定时、控制器30检测到脱离而停止写入的定时,存在磁头22的位置大幅脱离可变动范围的情况。
55.根据图3所示的例子,在磁头22通过了伺服扇区#k的定时,磁头22的位置已经超过了正侧的wos(s1)。然后,根据从伺服扇区#k读出的伺服信息而生成的位置误差信号被送向控制器30。s1之后,基于根据从伺服扇区#k读出的伺服信息而生成的位置误差信号,控制器30检测到磁头22超过了正侧的wos,停止数据的写入(s2)。在数据的写入停止了的s2的定时,从可变动范围的背离量比s1中的定时进一步扩大。
56.将磁头22的位置脱离(超出)可变动范围这一情况,简单记载为超出。将停止写入时的磁头22的位置从可变动范围的背离量记载为超出量。例如在图3中,lor相当于超出量。
57.写入的动作,不仅仅是写入目的地的磁道,对已经写入到与该写入目的地的磁道相邻的磁道的数据,也产生磁影响。该磁影响可称作ati(adjacent track interference,相邻磁道干扰)。由于ati,存在难以正确读取已经写入到与写入目的地的磁道相邻的磁道的数据的情况。换言之,存在与写入目的地的磁道相邻的磁道的数据消失的情况。为了防止与写入目的地的磁道相邻的磁道的数据消失,通常,希望尽可能地抑制超出量。
58.已经写入到1个磁道的数据的消失的风险,在磁头22从该1个磁道的两侧相邻的磁道向该1个磁道侧超出时尤其高。
59.例如,假设在磁道#n的正侧,依次设定有磁道#n 1及磁道#n 2。并且,在对磁道#n写入数据时,在发生了磁头22向正侧也就是说磁道#n 1侧的超出之后,执行向磁道#n 2的数据的写入。并且,当在向磁道#n 2写入数据时,发生了磁头22向负侧即磁道#n 1侧的超出时,已经写入到磁道#n 1的数据受到来自两侧的超出所带来的影响。在这样的情形下,认为磁道#n 1的数据消失的可能性非常高。
60.作为用于减低因来自两侧相邻的磁道的超出而磁道#n 1的数据消失的风险的1个方法,可以考虑重写磁道#n 1的数据。将该方法记载为比较例。根据比较例,当在对磁道#n写入数据时发生了磁头向磁道#n 1侧的超出时,控制器读取磁道#n 1的数据,将读取出的数据覆写于磁道#n 1。由此,磁道#n 1的数据的磁信息恢复,所以,即便在向磁道#n 2写入数据时发生了磁头向负侧即磁道#n 1侧的超出,磁道#n 1的数据消失的风险也低。
61.然而,根据比较例,在从磁道#n 1读取数据并将该数据重写于磁道#n 1为止的期间,需要用于保持该数据的存储区域。例如,在缓冲存储器被作为该存储区域而使用的情况下,所需的缓冲存储器的容量增加,磁盘装置的成本上升。另外,从磁道#n 1读取数据并将该数据写入于磁道#n 1的处理花费额外的时间。
62.根据实施方式,控制器30,当在对某磁道(例如磁道#n)写入数据时发生了磁头22向磁道#n 1侧的超出时,为了使在对磁道#n 2写入数据时磁道#n 1的数据受到的影响变小,使对磁道#n 2写入数据所涉及的条件比通常严格。在第1实施方式中,作为变严格的条件,举出wos。
63.图4是用于说明第1实施方式的wos的设定方法的示意性的图。在本图所示的例子中,设想在已经写入了磁道#n 1的数据的状态下,执行对磁道#n的数据的写入,在对磁道#n写入数据时发生了与图3同样的超出。也就是说,在对磁道#n写入数据时,在伺服扇区#k的附近发生了向磁道#n 1侧的超出。
64.在这样的情况下,与比较例不同,控制器30不执行磁道#n 1的数据的重写。并且,在之后进行对磁道#n 2的数据的写入的情况下,控制器30使磁道#n 2所涉及的2个wos中的磁道#n 1侧的wos(即负侧的wos)与通常相比缩减(紧缩)。控制器30,以与在对磁道#n写入时没有发生超出的情况相比、磁道#n 2所涉及的负侧的wos更接近磁道#n 2的中心的方式,变更磁道#n 2所涉及的负侧的wos。在图4所示的例子中,以使得磁道#m 2所涉及的负侧的wos在预定的范围(具体地说是伺服扇区#k-1到伺服扇区#k 1的范围)内以dl来更接近磁道#n 2的中心的方式,变更了磁道#n 2所涉及的负侧的wos,该预定的范围以在磁道#n中发生了超出的伺服扇区#i为中心。
65.由此,即便在对磁道#n 2写入时发生了向磁道#n 1侧的超出,也以wos缩减的量,抑制向磁道#n 1侧的超出量。因此,即便在对磁道#n 2写入时发生了向磁道#n 1侧的超出,
也能够使因对磁道#n 2的写入的动作而已经写入到磁道#n 1的数据受到的影响变少。其结果,即便不执行磁道#n 1的数据的重写,也能够抑制磁道#n 1的数据消失的风险。
66.图5是用于说明第1实施方式的写入的动作的流程图。本图所示的动作,无论哪一磁道的哪一数据扇区是写入目的地,都执行。在此,作为一例,设为磁道#m的伺服扇区#i近旁的数据扇区是写入目的地。所谓磁道#m的伺服扇区#i近旁的数据扇区,具体地说,是磁道#m中存在于从伺服扇区#i到伺服扇区#i 1的紧跟前的区间的数据扇区。
67.首先,控制器30使用磁头22等,执行对磁道#m的伺服扇区#i近旁的数据扇区写入数据的控制(s101)。然后,控制器30判定在s101的处理时是否发生了超出(s102)。
68.超出的发生,基于伺服扇区#i近旁的磁头22的当前位置与伺服扇区#i近旁的wos的比较来判定。
69.具体地说,在s101时,控制器30取得与由磁头22从磁道#m的伺服扇区#i读出的伺服信息对应的位置误差信号。然后,控制器30基于所取得的位置误差信号来推定磁头22的位置(更准确地说是距磁道#m的中心的距离)。然后,控制器30基于所推定的磁头22的位置与伺服扇区#i近旁的wos的比较,来判定是否发生了超出。
70.在判定为发生了超出的情况下(s102:是),控制器30将磁道#m的伺服扇区#i所涉及的超出信息保存于预定的存储区域(s103)。
71.超出信息至少包括超出发生的位置和磁头22超出的方向。在此,超出发生的位置是磁道#m的伺服扇区#i。磁头22超出的方向是正侧或负侧。
72.另外,预定的存储区域可任意设定。预定的存储区域也可以是ram27、from28或磁盘11。预定的存储区域也可以是from28或磁盘11,以免超出信息在电源断开时丢失。或者,预定的存储区域也可以是ram27,控制器30在电源断开前将ram27内的超出信息转存到from28或磁盘11。
73.s103之后,或在判定为没有发生超出的情况下(s102:否),控制器30结束写入的动作。
74.此外,在判定为发生了超出的情况下,控制器30如使用图3说明那样,停止写入的动作并执行写入重试。
75.另外,根据使用图5说明的例子,控制器30基于与从伺服扇区#i读出的伺服信息对应的位置误差信号来推定磁头22的位置。磁头22的位置的推定方法不限定于此。另外,与wos相比较的位置不限定于磁头22的当前位置。
76.例如,控制器30也可以基于与从伺服扇区#i-2读出的伺服信息对应的位置误差信号和与从伺服扇区#i-1读出的伺服信息对应的位置误差信号,推定伺服扇区#i近旁的位置。
77.或者,控制器30也可以基于与从伺服扇区#i-1读出的伺服信息对应的位置误差信号和与从伺服扇区#i读出的伺服信息对应的位置误差信号,推定磁头22的位置。
78.这样,控制器30可基于与从任意的伺服扇区读出的伺服信息对应的位置误差信号,以任意的方法推定磁头22的位置。
79.图6是用于说明第1实施方式的wos的变更相关的一系列的动作的流程图。本图所示的动作,无论写入目的地是哪一磁道的哪一数据扇区,都执行。在此,对于向磁道#m 2的伺服扇区#i近旁的数据扇区写入时的wos的变更相关的动作进行说明。所谓磁道#m 2的伺
服扇区#i近旁的数据扇区,具体地说,是磁道#m 2中存在于从伺服扇区#i到伺服扇区#i 1的紧跟前的区间的数据扇区。
80.首先,控制器30加载磁道#m的伺服扇区#i所涉及的超出信息(s201)。
81.然后,控制器30基于磁道#m的伺服扇区#i所涉及的超出信息,判定在向磁道#m的伺服扇区#i写入时是否发生了向正侧也就是说磁道#m 1侧的超出(s202)。
82.在判定为在向磁道#m的伺服扇区#i写入时发生了向正侧的超出的情况下(s202:是),控制器30进行磁道#m 2所涉及的2个wos中的负侧的wos的缩减(s203)。例如,控制器30进行使磁道#m 2所涉及的负侧的wos在伺服扇区#i近旁的数据扇区中接近磁道#m 2的中心的变更。
83.在判定为在向磁道#m的伺服扇区#i写入时没有发生向正侧的超出的情况下(s202:否),控制器30跳过s203的处理。
84.然后,控制器30加载磁道#m 4的伺服扇区#i所涉及的超出信息(s204)。
85.然后,控制器30基于磁道#m 4的伺服扇区#i所涉及的超出信息,判定在向磁道#m 4的伺服扇区#i写入时是否发生了向负侧也就是说磁道#m 3侧的超出(s205)。
86.在判定为在向磁道#m 4的伺服扇区#i写入时发生了向负侧的超出的情况下(s205:是),控制器30进行磁道#m 2所涉及的2个wos中的正侧的wos的缩减(s206)。例如,控制器30进行使磁道#m 2所涉及的正侧的wos在伺服扇区#i近旁的数据扇区中接近磁道#m 2的中心的变更。
87.在判定为在向磁道#m 4的伺服扇区#i写入时没有发生向负侧的超出的情况下(s205:否),控制器30跳过s206的处理。
88.然后,控制器30执行使磁头22向磁道#m 2移动的寻道动作的控制(s207)。当寻道动作完成后,控制器30进行向磁道#m 2的伺服扇区#i近旁的数据扇区的写入的动作的控制(s208)。在s208中,以与图5所示的动作同样的次序执行写入的动作。
89.然后,wos的变更相关的动作完成。
90.此外,以上,磁道#m 2所涉及的负侧的wos在向磁道#m的伺服扇区#i写入时发生了向正侧的超出的情况下缩减,磁道#m 2所涉及的正侧的wos在向磁道#m 4的伺服扇区#i写入时发生了向负侧的超出的情况下缩减。缩减的方法不限定于此。
91.例如,控制器30也可以:在向磁道#m的伺服扇区#i写入时发生了向正侧的超出或者在向磁道#m 4的伺服扇区#i写入时发生了向负侧的超出的情况下,将磁道#m 2所涉及的2个wos以相同量缩减。
92.另外,在磁道的周向上wos缩减的范围可任意设定。例如,在图4所示的例子中,在以发生了超出的伺服扇区#k为中心的3个伺服扇区量的范围内,执行了wos的缩减。控制器30也可以在周向的整个范围内执行wos的缩减。例如,也可以在向磁道#m的伺服扇区#i近旁的数据扇区写入数据时发生了向磁道#m 1侧的超出的情况下,控制器30使磁道#m 2所涉及的负侧的wos在磁道#m 2的整周上一律接近磁道#m 2的中心。
93.另外,wos的变更量既可以是一定的,也可以构成为可变。例如,控制器30也可以:超出量越大则使wos的变更量越大。在wos的变更量构成为可变的情况下,也可以对wos的变更量设置上限值、下限值或其双方。此外,在wos的变更量根据超出量变更的情况下,控制器30在图5的s103的处理中,将超出量记录于超出信息。并且,在图6的s203、s206的处理中,控
制器30基于记录于超出信息的超出量来决定wos的变更量。超出量与wos的变更量的关系是任意的。例如,超出量与wos既可以具有以一次函数表达的关系,也可以具有以二次函数表达的关系。控制器30在超出量大的情况下,与超出量小的情况相比,使变更量变大。
94.此外,超出量的推定方法是任意的。考虑例如在磁头22通过了磁道#m的伺服扇区#i时控制器30检测到超出的情况。在该情况下,控制器30也可以:将根据从伺服扇区#i读出的伺服信息而生成的位置误差信号减去wos所得到的值作为超出量而记录。
95.或者,控制器30也可以:基于根据从伺服扇区#i-1读出的伺服信息而生成的位置误差信号和根据从伺服扇区#i读出的伺服信息而生成的位置误差信号来推定超出量。即,根据从伺服扇区#i-1读出的伺服信息而生成的位置误差信号与根据从伺服扇区#i读出的伺服信息而生成的位置误差信号的差分,对应于磁头22的径向的变动速度。控制器30例如可以通过将该变动速度与从检测到超出起到停止写入为止所需的时间相乘,来算出相对于伺服扇区#i中的磁头22的位置的变动量。控制器30通过对伺服扇区#i中的磁头22的位置加上变动量,能够得到超出量的推定值。
96.也就是说,控制器30也可以基于位置误差信号的时序信息来推定超出量。
97.另外,控制器30在将wos缩减时,也可以例如如图7所示,以越接近检测到超出的伺服扇区(在图7的例子中是伺服扇区#k)则变更量越大的方式,使wos的变更量在周向上阶段性地变化。例如在图7中,以使得在如下范围内以dl2来更接近磁道#n 2的中心的方式,变更磁道#n 2所涉及的负侧的wos,该范围是以在磁道#n中检测到向正侧的超出的伺服扇区#k为中心的、伺服扇区#k-1到伺服扇区#k 1的范围。并且,以使得在磁道#n 2的周向上伺服扇区#k-1到伺服扇区#k 1的范围的外侧的、伺服扇区#k-2和伺服扇区#k 2的附近,以dl1来更接近磁道#n 2的中心的方式,变更磁道#n 2所涉及的负侧的wos。并且,dl2比dl1大。也就是说,控制器30以越接近检测到超出的伺服扇区则变更量越大的方式,使wos的变更量在周向上以2阶段变化。
98.如以上所述,根据第1实施方式,在执行对某磁道(记载为第1磁道)的写入的期间发生了超出的情况下,与没有发生超出的情况相比,使对在磁头22从第1磁道超出的那一侧隔着另外的1个磁道(第3磁道)而相邻的第2磁道的写入所涉及的条件变严格。具体地说,使第2磁道所涉及的第1磁道侧的wos(第1阈值)接近第2磁道的中心。执行对第1磁道的写入的期间的超出,说的是磁头22从第1磁道的中心(也就是说目标位置)向另外的磁道的那一侧变动而从目标位置到磁头22的距离超过wos(第1阈值)。
99.因此,通过向第2磁道写入数据时的磁头22的动作的控制,不用执行第3磁道的数据的重写,就能够抑制第3磁道的数据消失的风险。也就是说,能够合适地控制磁头22的动作。
100.另外,根据第1实施方式,在向第2磁道写入数据时,在磁头22是否处于在轨状态的判定中使用wos(第2阈值)。具体地说,控制器30在从第2磁道的目标位置到磁头22的位置的距离超过了wos(第2阈值)的情况下,进行控制以不执行向第2磁道的写入。另外,控制器30在从第2磁道的目标位置到磁头22的位置的距离不足wos(第2阈值)的情况下,进行控制以执行向第2磁道的写入。在从第2磁道的目标位置到磁头22的位置的距离与wos(第2阈值)相等的情况下,控制器30既可以进行控制以执行写入,也可以进行控制以不执行写入。
101.此外,以上,在超出的发生的判定和磁头22是否处于在轨状态的判定这双方中使
用了wos。在超出的发生的判定中所使用的阈值(第1阈值),也可以与在磁头22是否处于在轨状态的判定中所使用的wos(第2阈值)不同。
102.另外,根据第1实施方式,控制器30在与在第1磁道中检测到超出的发生的伺服扇区(第1磁道的周向的第1位置)相同的第2磁道中的伺服扇区(第2磁道的周向的第2位置)进行了wos的缩减。
103.如前述那样,控制器30也可以在第2磁道的周向上朝向与在第1磁道中检测到超出的发生的伺服扇区(第1磁道的周向的第1位置)相同的伺服扇区(第2磁道的周向的第2位置)将wos阶段性地缩减。
104.(第2实施方式)
105.在磁盘装置中,在使磁头向目标磁道移动的寻道动作之后,产生磁头的残留振动。通常,磁盘装置在寻道动作后的磁头的残留振动充分衰减之后再执行写入。磁头的残留振动是否充分衰减,根据在变动许可范围内连续检测到磁头的位置的次数是否达到了阈值(记载为振动衰减阈值)来判定。在变动许可范围内连续检测到磁头的位置的次数达到了振动衰减阈值的情况下,能够推定为磁头的残留振动充分衰减,所以,磁盘能够开始对目标磁道进行写入。
106.在第2实施方式中,作为在发生了超出的情况下变严格的条件,举出振动衰减阈值。例如,控制器当在对磁道#n写入数据时发生了磁头向磁道#n 1侧的超出时,与在对磁道#n写入数据时没有发生磁头向磁道#n 1侧的超出的情况相比,使向磁道#n 2写入时的振动衰减阈值变大。由此,在对磁道#n写入数据时发生了磁头向磁道#n 1侧的超出的情况下,与在对磁道#n写入数据时没有发生磁头向磁道#n 1侧的超出的情况相比,能够在对磁道#n 2写入数据时取得更多的等待残留振动的衰减的时间。其结果,能够使对磁道#n 2写入数据的期间的磁头的变动变小。由此,向磁道#n 1侧的超出的发生受到抑制,能够使因对磁道#n 2的写入的动作而已经写入到磁道#n 1的数据所受到的影响变少。
107.以下,对第2实施方式进行说明。将第2实施方式的磁盘装置记载为磁盘装置1a。将磁盘装置1a所具备的控制器记载为控制器30a。在此,对与第1实施方式不同的点进行说明。关于与第1实施方式相同的构成,简略地进行说明或者省略说明。
108.在磁盘装置1a中,控制器30a在写入的动作时,以与第1实施方式的控制器30相同的次序,保存超出信息。也就是说,磁盘装置1a执行图5所示的一系列的动作。
109.如前述那样,控制器30a构成为:在发生了超出的情况下,变更振动衰减阈值。
110.图8是用于说明第2实施方式的振动衰减阈值的变更相关的一系列的动作的流程图。本图所示的动作,无论写入目的地是哪一磁道的哪一数据扇区,都执行。在此,对执行向磁道#m 2的伺服扇区#i近旁的数据扇区的写入时的振动衰减阈值的变更相关的动作进行说明。所谓磁道#m 2的伺服扇区#i近旁的数据扇区,具体地说,是磁道#m 2中存在于从伺服扇区#i到伺服扇区#i 1的紧跟前的区间的数据扇区。
111.首先,控制器30a加载磁道#m的伺服扇区#i所涉及的超出信息(s301)。
112.然后,控制器30a基于磁道#m的伺服扇区#i所涉及的超出信息,判定在向磁道#m的伺服扇区#i写入时是否发生了向正侧也就是说磁道#m 1侧的超出(s302)。
113.在判定为在向磁道#m的伺服扇区#i写入时没有发生向正侧的超出的情况下(s302:否),控制器30a加载磁道#m 4的伺服扇区#i所涉及的超出信息(s303)。
114.然后,控制器30a基于磁道#m 4的伺服扇区#i所涉及的超出信息,判定在向磁道#m 4的伺服扇区#i写入时是否产生了向负侧也就是说磁道#m 3侧的超出(s304)。
115.在判定为在向磁道#m 4的伺服扇区#i写入时没有发生向负侧的超出的情况下(s304:否),控制器30a将预定值t1设定为振动衰减阈值(s305)。
116.在判定为在向磁道#m的伺服扇区#i写入时发生了向正侧的超出的情况下(s302:是),或者在判定为在向磁道#m 4的伺服扇区#i写入时发生了向负侧的超出的情况下(s304:是),控制器30a将比t1大的预定值t2设定为振动衰减阈值(s306)。
117.s305或s306之后,控制器30a执行使磁头22向磁道#m 2移动的寻道动作的控制(s307)。
118.当磁头22移动到磁道#m 2近旁时,控制器30a基于每当磁头22通过伺服扇区时取得的位置误差信号,判定磁头22的检测位置是否处于变动许可范围内。也就是说,判定磁头22是否处于在轨状态。并且,控制器30a对在变动许可范围内连续检测到磁头22的位置的次数进行计数。
119.然后,控制器30a判定在变动许可范围内连续检测到磁头22的位置的次数是否达到了衰减阈值(s308)。在判定为在变动许可范围内连续检测到磁头22的位置的次数没有达到衰减阈值的情况下(s308:否),控制器30a再次执行s308的处理。
120.在判定为在变动许可范围内连续检测到磁头22的位置的次数达到了衰减阈值的情况下(s308:是),控制器30a进行向磁道#m 2的伺服扇区#i近旁的数据扇区的写入的动作的控制(s309)。在s309中,以与图5所示的动作同样的次序执行写入的动作。s309之后,振动衰减阈值的变更相关的一系列的动作完成。
121.这样,根据第2实施方式,在执行对某磁道(第1磁道)的写入的期间发生了超出的情况下,与没有发生超出的情况相比,使对在磁头22从第1磁道超出的那一侧隔着另外的1个磁道(第3磁道)而相邻的第2磁道的写入所涉及的条件变严格。具体地说,使在进行了使磁头22向第2磁道移动的寻道动作时的振动衰减阈值变大。
122.因此,能够使对第2磁道写入数据的期间的磁头22的变动变小。由此,对第2磁道写入数据的期间的向第3磁道侧的超出的发生受到抑制。也就是说,通过向第2磁道写入数据时的磁头22的动作的控制,不执行第3磁道的数据的重写就能够抑制第3磁道的数据消失的风险。即,能够合适地控制磁头22的动作。
123.此外,第2实施方式可与第1实施方式并用。也就是说,控制器30a也可以执行:将第2磁道所涉及的wos缩减、和使在进行了使磁头22向第2磁道移动的寻道动作时的振动衰减阈值变大。
124.(第3实施方式)
125.通过使寻道动作中的磁头的移动速度(记载为寻道速度)变慢,能使寻道动作之后的残留振动变小。在第3实施方式中,寻道速度被进行控制。
126.例如,控制器当在对磁道#n写入数据时发生了磁头向磁道#n 1侧的超出时,与在对磁道#n写入数据时没有发生磁头向磁道#n 1侧的超出的情况相比,使为了向磁道#n 2写入而执行的寻道速度的设定值变慢。由此,能够使寻道动作之后的残留振动变小,能够使对磁道#n 2写入数据的期间的磁头的变动变小。其结果,在对磁道#n 2写入时,向磁道#n 1侧的超出的发生受到抑制,能够使因对磁道#n 2的写入的动作而已经写入到磁道#n 1的数据
所受到的影响变少。
127.此外,磁盘装置可构成为能够执行重新排序。所谓重新排序说的是:在磁盘装置从主机接收到多个命令的情况下,进行该多个命令的执行顺序的排序,高效地执行该多个命令的处理。在重新排序时所考虑的条件有几个,寻道动作所需的时间也是其中之一。也就是说,当寻道速度变更时,寻道动作所需的时间会变化,所以,对重新排序的处理产生影响。在第3实施方式中,在寻道速度变更了的情况下,基于变更后的寻道速度执行重新排序。
128.以下,对第3实施方式进行说明。将第3实施方式的磁盘装置记载为磁盘装置1b。将磁盘装置1b所具备的控制器记载为控制器30b。在此,对与第1实施方式或第2实施方式不同的点进行说明。关于与第1实施方式或第2实施方式相同的构成,简略地进行说明或者省略说明。
129.在磁盘装置1b中,控制器30b在写入的动作时,以与第1实施方式的控制器30相同的次序,保存超出信息。也就是说,磁盘装置1b执行图5所示的一系列的动作。
130.图9是用于说明第3实施方式的寻道速度的变更相关的一系列的动作的流程图。本图所示的动作,无论写入目的地是哪一磁道的哪一数据扇区,都执行。在此,对执行向磁道#m 2的伺服扇区#i近旁的数据扇区的写入时的寻道速度的变更相关的动作进行说明。所谓磁道#m 2的伺服扇区#i近旁的数据扇区,具体地说,是磁道#m 2中存在于从伺服扇区#i到伺服扇区#i 1的紧跟前的区间的数据扇区。
131.首先,控制器30b在s401~s404中执行与图8的s301~s304相同的处理。
132.然后,在判定为在向磁道#m的伺服扇区#i写入时没有发生向正侧的超出的情况下(s402:否)、且判定为在向磁道#m 4的伺服扇区#i写入时没有发生向负侧的超出的情况下(s404:否),控制器30b将预定值v1设定为寻道速度(s405)。
133.在判定为在向磁道#m的伺服扇区#i写入时发生了向正侧的超出的情况下(s402:是)、或者在判定为在向磁道#m 4的伺服扇区#i写入时发生了向负侧的超出的情况下(s404:是),控制器30b将比v1小的预定值v2设定为寻道速度(s406)。此外,在s405及s406中设定的寻道速度,是使磁盘11向磁道#m 2移动的寻道动作中的磁头22的速度。在向其他磁道的寻道动作时,不适用在s405或s406中设定的寻道速度。
134.s405或s406之后,控制器30b基于所设定的寻道速度执行重新排序(s407)。也就是说,控制器30b在从主机2已经接收到包括向磁道#m 2的伺服扇区#i近旁的数据扇区的写入的命令的多个命令的情况下,基于所设定的寻道速度决定该多个命令的执行顺序。
135.重新排序的执行后,控制器30b以通过重新排序决定的顺序依次执行多个命令。然后,控制器30b判定执行向磁道#m 2的伺服扇区#i近旁的数据扇区的写入的命令的定时是否到来(s408)。在执行向磁道#m 2的伺服扇区#i近旁的数据扇区的写入的命令的定时没有到来的情况下(s408:否),控制器30b再次执行s408的处理。
136.在执行向磁道#m 2的伺服扇区#i近旁的数据扇区的写入的命令的定时到来了的情况下(s408:是),控制器30b执行以所设定的寻道速度使磁头22向磁道#m 2移动的寻道动作的控制(s409)。
137.然后,当寻道动作完成后,控制器30b进行向磁道#m 2的伺服扇区#i近旁的数据扇区的写入的动作的控制(s410)。在s401中,以与图5所示的动作同样的次序执行写入的动作。s410之后,寻道动作的变更相关的一系列的动作完成。
138.这样,根据第3实施方式,在执行对某磁道(第1磁道)的写入的期间发生了超出的情况下,与没有发生超出的情况相比,控制器30b使得用于向在磁头22从第1磁道超出的那一侧隔着另外的1个磁道(第3磁道)而相邻的第2磁道的写入的寻道动作中的磁头22的移动速度的设定值变小。
139.因此,能够使对第2磁道写入数据的期间的磁头22的变动变小。由此,对第2磁道写入数据的期间的向第3磁道侧的超出的发生受到抑制。也就是说,通过向第2磁道写入数据时的磁头22的动作的控制,不执行第3磁道的数据的重写就能够抑制第3磁道的数据消失的风险。即,能够合适地控制磁头22的动作。
140.另外,根据第3实施方式,控制器30b根据基于有无发生超出而决定的磁头22的移动速度的设定值来执行重新排序。也就是说,控制器30b根据基于有无发生超出而决定的磁头22的移动速度的设定值,执行从主机接收到的多个命令的执行的顺序。
141.由此,基于重新排序而得到的效率提高。
142.此外,第3实施方式也可与第1实施方式及第2实施方式的任一方并用。
143.如以上所述,根据第1~第3实施方式,控制器30、30a、30b,在执行对某磁道(记载为第1磁道)的写入的期间、磁头22向第2磁道侧超出的情况下,以与磁头22没有向第2磁道侧超出的情况时不同的条件,控制对第2磁道的写入。
144.因此,通过向第2磁道写入数据时的磁头22的动作的控制,不执行介于第1磁道与第2磁道之间的磁道的数据的重写就能够抑制该数据消失的风险。也就是说,能够合适地控制磁头22的动作。
145.(变形例1)
146.以下,作为第1~第3实施方式的变形例,对变形例1进行说明。
147.在检测到超出的发生时变严格的条件能够进行各种变形。可以代替在第1~第3实施方式中变严格的条件,或者除了在第1~第3实施方式中变严格的条件之外,还使下述所示的条件变严格。
148.例如,存在以下情况:控制器30、30a、30b构成为,通过基于使用了滤波器(例如fir滤波器)的回归分析的预测来判定磁头22是否处于在轨状态。在这样的情况下,控制器30、30a、30b也可以:在对第1磁道写入时磁头22向第2磁道侧超出了的情况下,在对第2磁道写入时,切换上述滤波器的参数,以使得能够以比在对第1磁道写入时磁头22没有向第2磁道侧超出的情况时严格的条件进行预测。
149.另外,控制器30、30a、30b在磁头22定位时,执行第1实施方式中所述的反馈控制。在反馈控制中,使用决定使相应于干扰而发生的振动收敛的强度的增益等各种参数。控制器30、30a、30b也可以:在对第1磁道写入时磁头22向第2磁道侧超出了的情况下,在对第2磁道写入时,使用与在对第1磁道写入时磁头22没有向第2磁道侧超出的情况不同的值,作为反馈控制的参数。例如,控制器30、30a、30b也可以:在对第1磁道写入时磁头22向第2磁道侧超出了的情况下,在对第2磁道写入时,使决定使相应于干扰而发生的振动收敛的强度的增益变大。
150.另外,控制器30、30a、30b也可以:在对第1磁道写入时磁头22向第2磁道侧超出了的情况下,在对第2磁道写入时,使第2磁道的中心向与第1磁道相反的一侧移位(shift)。由此,在向第2磁道写入时,即便发生了向介于第1磁道与第2磁道之间的第3磁道侧的超出,也
能够与向第2磁道写入的目标位置即第2磁道的中心向与第3磁道相反的一侧移位相应地,减低因向第2磁道的写入所造成的对第3磁道的数据的影响。也就是说,不执行第3磁道的数据的重写就能够抑制第3磁道的数据消失的风险。
151.另外,磁盘装置1、1a、1b具备加速度传感器,控制器30、30a、30b能通过该加速度传感器检测磁盘装置1、1a、1b从外部受到的振动或冲击(碰撞)。并且,控制器30、30a、30b与检测到振动或冲击相应地,执行写入的停止、磁头22向斜坡13的退避等各种控制。控制器30、30a、30b也可以:在对第1磁道写入时磁头22向第2磁道侧超出了的情况下,在对第2磁道写入时,与在对第1磁道写入时磁头22没有向第2磁道侧超出的情况相比,使振动或冲击的检测的灵敏度变高。使振动或冲击的检测的灵敏度变高的方法,不限定于特定的方法。例如,控制器30、30a、30b可以通过使加速度传感器的灵敏度变高,来使振动或冲击的检测的灵敏度变高。或者,控制器30、30a、30b可以通过使与加速度传感器的检测值进行比较的振动或冲击的检测用的阈值变小,来使振动或冲击的检测的灵敏度变高。
152.另外,控制器30、30a、30b也可以根据状况来变更使写入所涉及的条件变严格的程度。
153.磁盘装置1、1a、1b的温度越高,则ati的影响越大。也可以是:磁盘装置1、1a、1b具备温度传感器,温度传感器的检测值越大,则控制器30、30a、30b使写入所涉及的条件越严格。在一例中,控制器30、30a、30b在对第1磁道写入时磁头22向第2磁道侧超出了的情况下,在对第2磁道写入时,使wos比在对第1磁道写入时磁头22没有向第2磁道侧超出的情况接近第2磁道的中心。此时,控制器30、30a、30b取得温度传感器的检测值,该取得的检测值越大,则使wos接近第2磁道的中心的量越大。
154.另外,磁盘装置1、1a、1b具备加速度传感器。并且,也可以是:加速度传感器的检测值越大,则控制器30、30a、30b使写入所涉及的条件越严格。在一例中,控制器30、30a、30b在对第1磁道写入时磁头22向第2磁道侧超出了的情况下,在对第2磁道写入时,使wos比在对第1磁道写入时磁头22没有向第2磁道侧超出的情况接近第2磁道的中心。此时,控制器30、30a、30b取得加速度传感器的检测值,该取得的检测值越大,则使wos接近第2磁道的中心的量越大。
155.另外,也可以是:磁道间距余裕越小,则控制器30、30a、30b使写入所涉及的条件越严格。磁道间距余裕,是从实际的磁道的间隔(磁道间距)减去保证最低限度的写入读取品质所需的磁道间距而得到的量。磁道间距余裕也可被称作磁道密度余裕或tpi余裕。在一例中,控制器30、30a、30b在对第1磁道写入时磁头22向第2磁道侧超出了的情况下,在对第2磁道写入时,使wos比在对第1磁道写入时磁头22没有向第2磁道侧超出的情况接近第2磁道的中心。此时,控制器30、30a、30b取得第2磁道所涉及的磁道间距余裕,该取得的磁道间距余裕越小,则使wos接近第2磁道的中心的量越大。
156.另外,也可以是:控制器30、30a、30b根据来自伺服信息的位置误差信号的解调的线性度的劣化,使写入所涉及的条件变严格。在一例中,控制器30、30a、30b在对第1磁道写入时磁头22向第2磁道侧超出了的情况下,在对第2磁道写入时,使wos比在对第1磁道写入时磁头22没有向第2磁道侧超出的情况接近第2磁道的中心。此时,向第2磁道写入时的位置误差信号的解调的线性度越差,则控制器30、30a、30b使wos接近第2磁道的中心的量越大。
157.磁道的中心可能从磁盘11的旋转中心偏心。并且,存在彼此相邻的2个磁道的偏心
方向或偏心率不同的情况。这样的情况下,可能产生该2个磁道间的距离(即磁道间距)比其他窄的部分。也可以是:磁道间距越窄,则控制器30、30a、30b使写入所涉及的条件越严格。在一例中,控制器30、30a、30b在对第1磁道写入时磁头22向第2磁道侧超出了的情况下,在对第2磁道写入时,使wos比在对第1磁道写入时磁头22没有向第2磁道侧超出的情况接近第2磁道的中心。此时,第2磁道与第3磁道之间的间隔越窄,则控制器30、30a、30b使wos接近第2磁道的中心的量越大。
158.另外,控制器30、30a、30b按每个磁道存储有表示ati的影响的程度的评价值。控制器30、30a、30b在向某磁道写入数据时,使该磁道近旁的磁道所涉及的评价值增加。并且,在评价值成为了预定值以上的情况下,控制器30、30a、30b执行评价值成为了预定值以上的磁道的数据的重写。也可以是:评价值越大,则控制器30、30a、30b使写入所涉及的条件越严格。在一例中,控制器30、30a、30b在对第1磁道写入时磁头22向第2磁道侧超出了的情况下,在对第2磁道写入时,使wos比在对第1磁道写入时磁头22没有向第2磁道侧超出的情况接近第2磁道的中心。此时,第3磁道所涉及的评价值越大,则控制器30、30a、30b使wos接近第2磁道的中心的量越大。
159.这样,使写入所涉及的条件变严格的量,也可以能够根据各种要因而变化。根据以上所述的例子,写入所涉及的条件,是wos、振动衰减阈值、寻道速度的设定值、在轨状态的判定中所使用的滤波器的参数、定位控制(反馈控制)中所使用的参数、磁道的中心位置的设定、振动或冲击的检测的灵敏度、或它们的组合。
160.对本发明的几个实施方式进行了说明,但这些实施方式是作为例子而提示的,并非旨在限定发明的范围。这些新颖的实施方式能够以其他各种方式实施,能够在不脱离发明的要旨的范围内进行各种省略、置换、变更。这些实施方式及其变形,包含于发明的范围、要旨中,并且包含于权利要求书记载的发明及其等同的范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。