1.本公开涉及地球物理勘探技术领域,特别涉及一种电磁勘探方法及装置。
背景技术:
2.电磁勘探法是指以电磁场为工具,基于电磁场在地下的传播规律而进行勘探的方法,电磁勘探方法包括直流电阻率法、大地电磁测深法、电偶源瞬变电磁测深法、磁偶源瞬变电磁测深法、探地雷达法等多种方法。受制于体积效果,导致电磁法勘探方法的分辨率较低。然而,随着生产实践对精度的要求越来越高,如何提高电磁勘探方法的分辨率变得至关重要。
3.由于大地中的电磁场满足扩散方程而不是波段方程,因此,相关技术在进行电磁勘探时,需要进行波场变换,将电磁场的扩散方程变换成波段方程,并将波动方程进行逆时偏移成像,进而基于电磁偏移成像结果进行电磁勘探。
4.然而,相关技术需要进行复杂的方程变换,导致勘探过程复杂度较高。
技术实现要素:
5.为了解决相关技术的问题,本公开实施例提供了一种电磁勘探方法及装置。所述技术方案如下:
6.一方面,提供了一种电磁勘探方法,所述方法包括:
7.获取每个测点对应的波场电动势集合,所述波场电动势集合包括不同时刻在每个测点采集到的多个电动势;
8.确定每个测点与成像点之间的距离;
9.根据每个测点与所述成像点之间的距离及每个测点的波场电动势集合,确定每个测点在所述成像点的波场值;
10.将各个测点在所述成像点的波场值进行叠加,得到所述成像点的总波场值;
11.根据所述成像点的总波场值,进行电磁勘探。
12.在本公开的另一个实施例中,所述确定每个测点与成像点之间的距离,包括:
13.获取电磁信号从每个测点到所述成像点的往返时间;
14.获取所述电磁信号的传播速度;
15.根据所述往返时间和所述传播速度,确定每个测点与所述成像点之间的距离。
16.在本公开的另一个实施例中,所述根据每个测点与所述成像点之间的距离及每个测点的波场电动势集合,确定每个测点在所述成像点的波场值,包括:
17.从每个测点的电动势集合中,获取目标电动势;
18.根据目标电动势及每个测点与所述成像点之间的距离,确定每个测点在所述成像点的波场值。
19.在本公开的另一个实施例中,所述从每个测点的电动势集合中,获取目标电动势,包括:
20.计算指定时刻与采集时间间隔的比值,得到所述指定时刻对应的采集编号;
21.基于所述采集编号,从所述电动势集合中,获取所述目标电动势。
22.在本公开的另一个实施例中,所述根据每个目标电动势及每个测点与所述成像点之间的距离,确定每个测点在所述成像点的波场值,包括:
23.对于任一测点,如果所述测点的目标电动势为感应电动势,则将所述目标电动势和所述测点与所述成像点之间的距离的乘积,作为所述测点在所述成像点的波场值;
24.如果所述目标电动势为电场或磁场的电动势,则获取所述测点与所述成像点之间的距离的平方,并将所述目标电动势与所述距离的平方的乘积,作为所述测点在所述成像点的波场值。
25.在本公开的另一个实施例中,所述根据所述成像点的总波场值,进行电磁勘探,包括:
26.根据所述成像点的位置坐标和所述成像点的总波场值,将总波场值相同的成像点相连,得到波场值剖面图;
27.基于波场值剖面图进行电磁勘探。
28.另一方面,提供了一种电磁勘探装置,所述装置包括:
29.获取模块,用于获取每个测点对应的波场电动势集合,所述波场电动势集合包括不同时刻在每个测点采集到的多个电动势;
30.第一确定模块,用于确定每个测点与成像点之间的距离;
31.第二确定模块,用于根据每个测点与所述成像点之间的距离及每个测点的波场电动势集合,确定每个测点在所述成像点的波场值;
32.叠加模块,用于将各个测点在所述成像点的波场值进行叠加,得到所述成像点的总波场值;
33.勘探模块,用于根据所述成像点的总波场值,进行电磁勘探。
34.在本公开的另一个实施例中,所述第一确定模块,用于获取电磁信号从每个测点到所述成像点的往返时间;获取所述电磁信号的传播速度;根据所述往返时间和所述传播速度,确定每个测点与所述成像点之间的距离。
35.在本公开的另一个实施例中,所述第二确定模块,用于从每个测点的电动势集合中,获取目标电动势;根据目标电动势及每个测点与所述成像点之间的距离,确定每个测点在所述成像点的波场值。
36.在本公开的另一个实施例中,所述第二确定模块,用于计算指定时刻与采集时间间隔的比值,得到所述指定时刻对应的采集编号;基于所述采集编号,从所述电动势集合中,获取所述目标电动势。
37.在本公开的另一个实施例中,所述第二确定模块,用于对于任一测点,如果所述测点的目标电动势为感应电动势,则将所述目标电动势和所述测点与所述成像点之间的距离的乘积,作为所述测点在所述成像点的波场值;如果所述目标电动势为电场或磁场的电动势,则获取所述测点与所述成像点之间的距离的平方,并将所述目标电动势与所述距离的平方的乘积,作为所述测点在所述成像点的波场值。
38.在本公开的另一个实施例中,所述勘探模块,用于根据所述成像点的位置坐标和所述成像点的总波场值,将总波场值相同的成像点相连,得到波场值剖面图;基于波场值剖
面图进行电磁勘探。
39.本公开实施例提供的技术方案带来的有益效果是:
40.不是基于传统的视电阻率概念而是基于电磁波在地下的传播速度远低于光速的特性设计而成,该方法无需进行方程变换,通过波场值叠加即可计算出每个成像点的总波场值,因而降低了测量过程的复杂度,且能有效降低电磁法的体积效应,提高勘探的效果。
附图说明
41.为了更清楚地说明本公开实施例中的技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本公开的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
42.图1是本公开实施例提供的一种电磁勘探方法的流程图;
43.图2是本公开实施例提供的另一种电磁勘探方法的流程图;
44.图3是本公开实施例提供的观测点与成像点的示意图;
45.图4是本公开实施例提供的一种感应电动势的曲线图;
46.图5是本公开实施例提供的一种偏移成像结果图;
47.图6是本公开实施例提供的一种电磁勘探装置的结构示意图。
具体实施方式
48.为使本公开的目的、技术方案和优点更加清楚,下面将结合附图对本公开实施方式作进一步地详细描述。
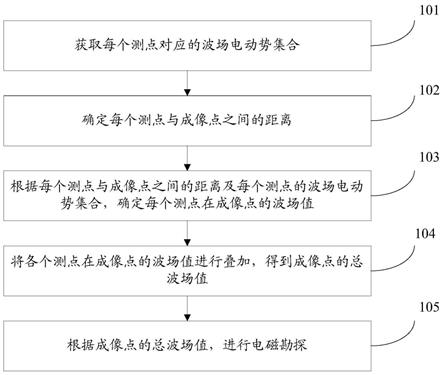
49.本公开实施例提供了一种电磁勘探方法,参见图1,本公开实施例提供的方法流程包括:
50.101、获取每个测点对应的波场电动势集合。
51.其中,波场电动势集合包括不同时刻在每个测点采集到的多个电动势。
52.102、确定每个测点与成像点之间的距离。
53.103、根据每个测点与成像点之间的距离及每个测点的波场电动势集合,确定每个测点在成像点的波场值。
54.104、将各个测点在成像点的波场值进行叠加,得到成像点的总波场值。
55.105、根据成像点的总波场值,进行电磁勘探。
56.本公开实施例提供的方法,不是基于传统的视电阻率概念而是基于电磁波在地下的传播速度远低于光速的特性设计而成,该方法无需进行方程变换,通过波场值叠加即可计算出每个成像点的总波场值,因而降低了测量过程的复杂度,且能有效降低电磁法的体积效应,提高勘探的效果。
57.在本公开的另一个实施例中,确定每个测点与成像点之间的距离,包括:
58.获取电磁信号从每个测点到成像点的往返时间;
59.获取电磁信号的传播速度;
60.根据往返时间和传播速度,确定每个测点与成像点之间的距离。
61.在本公开的另一个实施例中,根据每个测点与成像点之间的距离及每个测点的波
场电动势集合,确定每个测点在成像点的波场值,包括:
62.从每个测点的电动势集合中,获取目标电动势;
63.根据目标电动势及每个测点与成像点之间的距离,确定每个测点在成像点的波场值。
64.在本公开的另一个实施例中,从每个测点的电动势集合中,获取目标电动势,包括:
65.计算指定时刻与采集时间间隔的比值,得到指定时刻对应的采集编号;
66.基于采集编号,从电动势集合中,获取目标电动势。
67.在本公开的另一个实施例中,根据每个目标电动势及每个测点与成像点之间的距离,确定每个测点在成像点的波场值,包括:
68.对于任一测点,如果测点的目标电动势为感应电动势,则将目标电动势和测点与成像点之间的距离的乘积,作为测点在成像点的波场值;
69.如果目标电动势为电场或磁场的电动势,则获取测点与成像点之间的距离的平方,并将目标电动势与距离的平方的乘积,作为测点在成像点的波场值。
70.在本公开的另一个实施例中,根据成像点的总波场值,进行电磁勘探,包括:
71.根据成像点的位置坐标和成像点的总波场值,将总波场值相同的成像点相连,得到波场值剖面图;
72.基于波场值剖面图进行电磁勘探。
73.上述所有可选技术方案,可以采用任意结合形成本公开的可选实施例,在此不再一一赘述。
74.本公开实施例提供了一种电磁勘探方法,以进行电磁勘探的设备执行本公开实施例为例,参见图2,本公开实施例提供的方法流程包括:
75.201、获取每个测点的位置坐标及成像点的位置坐标。
76.其中,测点是指预先设置的对电磁信号进行接收、采集的观测点。测点的数量可根据实际勘探需要进行设置,如果对勘探精度要求较高,则测点的数量可以相对选取较多数量;如果对勘探精度要求较低,则测点的数量可以相对选取较少的数量。
77.根据测点的大地坐标计算相对坐标。相对坐标的原点设置在测线的第一个测点。在相对坐标系中,测点的横坐标表示测点与原点之间的距离,测点的纵坐标表示测点的高程,也即是测点的海拔高度。测点的横坐标和纵坐标的单位为米。在本公开实施例中,测点的横坐标采用u表示,纵坐标采用v表示,测点的位置坐标表示为(u,v)。对于第i个测点,其坐标表示为(u(i),v(i))。
78.其中,成像点为预先设置的待确定波场强度的点。成像点的数量也可根据实际勘探需求进行设置,如果对勘探精度要求较高,则成像点的数量可以相对选取较多数量;如果对勘探精度要求较低,则成像点的数量可以相对选取较少数量。
79.成像点的横坐标和纵坐标表示水平面上横纵方向的坐标。成像点的横坐标用x表示,成像点的纵坐标用y表示。考虑到不同海拔高度的成像点的波场值是不同的,对于海拔高度为k的第i成像点p的坐标表示为(x(i,k),y(i,k))。
80.图3示出了测点与成像点的示意图,图中1指示的箭头表示测点,图中2所示的所有网格节点表示成像点,由可3可知,测点数量为5个,成像点数量为15个。
81.202、获取每个测点对应的波场电动势集合。
82.对于每个测点,每隔预设时间间隔采集一次电动势,得到多个电动势,并将多个电动势组成波场电动势集合。其中,采集时间间隔可用delta t表示,采集到的多个电动势可用y1、y2、y3、
…
、yn表示,测点对应的波场电动势集合表示为(y1,y2,y3,
…
,yn)。
83.图4示出了中心回线瞬变电磁测深观测方式记录的一个测点的感应电动势曲线,从0时刻开始采样,采样的时间步长是0.8微秒,共记录0.024秒的时间,即30000个感应电动势数据。图4中横轴表示时间,时间单位为秒;纵轴表示感应电动势,感应电动势的单位是毫伏。
84.203、确定每个测点与成像点之间的距离。
85.本公开实施例在确定每个测点与成像点之间的距离时,可采用如下方法:
86.2031、获取电磁信号从每个测点到成像点的往返时间。
87.其中,往返时间是指电磁信号从测点发出后到达成像点,再从成像点回到测点的时间。
88.2032、获取电磁信号的传播速度。
89.考虑到不同频率的电磁波在不同电阻率的大地中传播时,电磁波的传播速度是不同的,因此,本公开实施例提供的方法在获取电磁信号的传播速度时,可获取电磁信号的电阻率,并获取大地的电阻率,进而根据电磁信号的电阻率和大地的电阻率,确定出电磁信号的传播速度。
90.表1示出了不同频率的电磁波在不同电阻率的大地传播时,电磁波的传播速度。
91.表1
[0092][0093]
2033、根据往返时间和传播速度,确定每个测点与成像点之间的距离。
[0094]
对于任一测点,通过将往返时间与传播速度相乘,得到往返路程,并将往返路程除以2,得到该测点与成像点之间的距离。设定往返时间为t,传播速度为v,则往返路程s=tv,测点与成像点之间的距离r=s/2。
[0095]
204、根据每个测点与成像点之间的距离及每个测点的波场电动势集合,确定每个测点在成像点的波场值。
[0096]
本公开实施提供的方法在根据每个测点与成像点之间的距离及每个测点的波场电动势集合,确定每个测点在成像点的波场值时,可采用如下方法:
[0097]
2041、从每个测点的电动势集合中,获取目标电动势。
[0098]
由于本公开实施例中每个测点的电动势都对应采集时间,因而获取指定时刻的目标电动势时,可计算指定时刻与采集时间间隔的比值,得到指定时刻对应的采集编号,进而基于采集编号,从电动势集合中,获取目标电动势。其中,指定时刻可以为预先设置的勘探时间。
[0099]
例如,设定指定时刻为t1,采集时间间隔为deltat,则采集编号index=t/deltat,
基于该采集编号从测点a的电动势集合(y1,y2,y3,
…
,yn)中找到第i个数据yi,进而确定目标电动势为yi。
[0100]
2042、根据目标电动势及每个测点与成像点之间的距离,确定每个测点在成像点的波场值。
[0101]
由于测点的电动势包括感应电动势、波场或磁场电动势等,对于不同的电动势在计算成像点的波场值时,采取的计算方法是不同的,因此,对于任一测点,针对该测点的目标电动势的不同,在确定该测点在成像点的波场值时,包括但不限于如下方式:
[0102]
第一种方式、如果测点的目标电动势为感应电动势,则将目标电动势和测点与成像点之间的距离的乘积,作为测点在成像点的波场值。
[0103]
设定目标电动势为f,测点与成像点之间的距离为r,则当目标电动势为感应电动势时,测点在成像点的波场值为fp=f*r。
[0104]
第二种方式、如果目标电动势为电场或磁场的电动势,则获取测点与成像点之间的距离的平方,并将目标电动势与距离的平方的乘积,作为测点在成像点的波场值。
[0105]
设定目标电动势为f,测点与成像点之间的距离为r,则当目标电动势为电场或磁场的电动势时,测点在成像点的波场值为fp=f*r2。
[0106]
205、将各个测点在成像点的波场值进行叠加,得到成像点的总波场值。
[0107]
当获取到各个测点在成像点的波场值,可将各个测点在成像点的波场值进行叠加,得到该成像点的总波场值。
[0108]
206、根据成像点的总波场值,进行电磁勘探。
[0109]
当得到成像点的总波场值,本公开实施例根据成像点的位置坐标和成像点的总波场值,将总波场值相同的成像点相连,得到波场值剖面图,进而基于波场值剖面图进行电磁勘探。
[0110]
具体实施时,可基于等值线绘制工具将总波场值相同位置坐标不同的成像点相连,得到波场值剖面图,该波场值剖面图可参见图5。其中,等值线绘制工具可以为surfer等。由于不同物质所形成的波场值剖面图是不同的,因此,基于不同物质的特性及所得到的波场值剖面图,可进行金属矿勘探、地下水勘探、油气资源勘探、工程检测等电磁勘探。
[0111]
本公开实施例提供的方法,不是基于传统的视电阻率概念而是基于电磁波在地下的传播速度远低于光速的特性设计而成,该方法无需进行方程变换,通过波场值叠加即可计算出每个成像点的总波场值,因而降低了测量过程的复杂度,且能有效降低电磁法的体积效应,提高勘探的效果。
[0112]
参见图6,本公开实施例提供了一种电磁勘探装置,该装置包括:
[0113]
获取模块601,用于获取每个测点对应的波场电动势集合,波场电动势集合包括不同时刻在每个测点采集到的多个电动势;
[0114]
第一确定模块602,用于确定每个测点与成像点之间的距离;
[0115]
第二确定模块603,用于根据每个测点与成像点之间的距离及每个测点的波场电动势集合,确定每个测点在成像点的波场值;
[0116]
叠加模块604,用于将各个测点在成像点的波场值进行叠加,得到成像点的总波场值;
[0117]
勘探模块605,用于根据成像点的总波场值,进行电磁勘探。
[0118]
在本公开的另一个实施例中,第一确定模块602,用于获取电磁信号从每个测点到成像点的往返时间;获取电磁信号的传播速度;根据往返时间和传播速度,确定每个测点与成像点之间的距离。
[0119]
在本公开的另一个实施例中,第二确定模块603,用于从每个测点的电动势集合中,获取目标电动势;根据目标电动势及每个测点与成像点之间的距离,确定每个测点在成像点的波场值。
[0120]
在本公开的另一个实施例中,第二确定模块603,用于计算指定时刻与采集时间间隔的比值,得到指定时刻对应的采集编号;基于采集编号,从电动势集合中,获取目标电动势。
[0121]
在本公开的另一个实施例中,第二确定模块603,用于对于任一测点,如果测点的目标电动势为感应电动势,则将目标电动势和测点与成像点之间的距离的乘积,作为测点在成像点的波场值;如果目标电动势为电场或磁场的电动势,则获取测点与成像点之间的距离的平方,并将目标电动势与距离的平方的乘积,作为测点在成像点的波场值。
[0122]
在本公开的另一个实施例中,勘探模块605,用于根据成像点的位置坐标和成像点的总波场值,将总波场值相同的成像点相连,得到波场值剖面图;基于波场值剖面图进行电磁勘探。
[0123]
综上,本公开实施例提供的装置,不是基于传统的视电阻率概念而是基于电磁波在地下的传播速度远低于光速的特性设计而成,该方法无需进行方程变换,通过波场值叠加即可计算出每个成像点的总波场值,因而降低了测量过程的复杂度,且能有效降低电磁法的体积效应,提高勘探的效果。
[0124]
本领域普通技术人员可以理解实现上述实施例的全部或部分步骤可以通过硬件来完成,也可以通过程序来指令相关的硬件完成,所述的程序可以存储于一种计算机可读存储介质中,上述提到的存储介质可以是只读存储器,磁盘或光盘等。
[0125]
以上所述仅为本公开的可选实施例,并不用以限制本公开,凡在本公开的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本公开的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。