1.本实用新型涉及微流控聚合物芯片产品制造技术领域,具体涉及找平装置。
背景技术:
2.微流控芯片是微全分析系统的研究重点。随着聚合物材料的广泛应用,目前除了传统的硅和玻璃材料外,聚合物材料因其价格低廉、制作工艺简单、不易破碎、适合大批量生产等优点,已经成为制作微流控芯片的主要材料。
3.芯片的封装是聚合物芯片生产中的重要环节。在聚合物芯片的封装领域,超声波焊接具有焊接时间短、焊接强度高、生物兼容性好、不需要外部热源的独特优势。这些优势,使得超声波焊接具有广阔的应用前景。但是,超声波焊接中仍然存在制约其应用的瓶颈,其中最为突出的就是,焊接压头难以与芯片焊接面平行。在焊接过程中,芯片置于工作台上的芯片卡槽内,水平的焊接压头缓缓落下与芯片的上表面紧密接触,并发生高频振动,在压力和高频振动的双重作用下,芯片内部的焊接筋发生融化并流延。若压头与芯片平行度较差,就会导致压力和超声能量的分布不均,从而使得芯片部分区域焊接过度,造成堵塞微通道,部分区域焊接不足,导致焊接强度降低,造成密封不足甚至漏液,影响芯片产品的质量。
4.为了保证焊接压头与芯片焊接面平行,现有技术中,在焊接之前需要通过人工反复调整工作台下方的支撑板,使得工作台处于水平位置,还需要反复调整工作台在支撑板上的位置,确保芯片对准上方的焊接压头,调整过程费时费力,并且精度不高,可能影响产品质量。
技术实现要素:
5.本实用新型的目的在于:针对现有技术中需人工调节工作台至水平位置,调整过程费时费力,且精度不高,可能影响产品质量的问题,提供一种找平装置。
6.为了实现上述目的,本实用新型采用的技术方案为:
7.找平装置,包括支撑板,还包括底板、监测装置、控制模块和调节机构,所述调节机构包括从下至上依次连接的伺服电机、螺杆、螺纹轴套和球铰支座,所述底板的上表面通过至少三个所述调节机构与所述支撑板的下表面连接,所述监测装置、控制模块和伺服电机依次电连接,所述监测装置可监测所述支撑板的水平度,所述控制模块可基于所述监测装置的监测结果控制所述调节机构调节所述支撑板至水平位置。
8.采用前述技术方案的本实用新型,通过设置监测装置监测支撑板的水平度,设置控制模块基于监测结果控制若干个伺服电机调节转动轴连接的螺杆与螺纹轴套的配合量,进而调节每个球铰支座支撑点的高低,若干个调节机构配合调节支撑板至水平位置,相比于现有技术中需人工调节工作台至水平位置,调整过程费时费力的问题,本实用新型可实现自动化调平,省时省力,且调整的精度较高,保证产品质量。
9.进一步的,所述监测装置包括视觉识别系统,所述视觉识别系统包括电连接的高清相机和视觉分析模组,所述高清相机可对所述支撑板拍照,所述视觉分析模组可基于上
述拍照结果确定所述支撑板相较于水平的倾斜方向及角度,利用视觉识别系统可精确确定支撑板的水平程度,避免通过人工识别水平度带来的误差。
10.进一步的,所述监测装置包括陀螺仪传感器,所述陀螺仪传感器设于所述支撑板上,所述陀螺仪传感器用于确定所述支撑板相较于水平的倾斜方向及角度,利用陀螺仪传感器可准确确定支撑板的水平程度,避免通过人工识别水平度带来的误差。
11.进一步的,还包括设于所述支撑板上方的滑块以及设于所述滑块上方的工作台,所述滑块通过第一轨道与所述支撑板滑动连接,所述工作台通过第二轨道与所述滑块滑动连接,所述第一轨道和所述第二轨道相互垂直,通过滑动滑块和工作台可调整工作台在水平面内的位置至基准位置,便于后续聚合物芯片的焊接。
12.进一步的,还包括第一电机和第二电机,所述第一电机与所述滑块连接,所述第二电机设于所述滑块上并与所述工作台连接,所述控制系统与所述第一电机和第二电机电连接,所述高清相机可对所述工作台拍照,所述视觉分析模组可基于所述拍照结果确定所述工作台的位置相较于基准位置的偏差量,所述控制模块可基于所述偏差量控制所述第一电机和第二电机调节所述工作台至基准位置,通过视觉识别系统、控制系统和调节机构相互配合调整工作台至基准位置,可实现工作台的精确定位,避免通过人工调整带来的误差。
13.进一步的,所述第一电机和第二电机分别为第一步进电机和第二步进电机,所述第一步进电机和第二步进电机均通过丝杠螺母副传动结构分别与所述滑块和工作台连接,采用步进电机驱动,结构可靠,易于实现。
14.进一步的,所述第一电机和第二电机分别为第一伺服电机和第二伺服电机,所述第一伺服电机和第二伺服电机均通过丝杠螺母副传动结构分别与所述滑块和工作台连接,采用伺服电机驱动,结构可靠,易于实现。
15.进一步的,包括四个所述调节机构,分别位于所述支撑板四个角的下方,确保对支撑板的支撑稳定可靠,且可以实现对支撑板高度的调节。
16.进一步的,包括三个所述调节机构,还包括上端设有球铰支座的支撑杆,三个所述调节机构和所述支撑杆分别位于所述支撑板四个角的下方,确保对支撑板的支撑稳定可靠。
17.本实用新型的有益效果是:可实现工作台的自动调平以及水平面内工作台位置的自动调整,避免人工参与,省时省力,提高生产效率,同时保证调整精度,确保芯片产品的高质量。
附图说明:
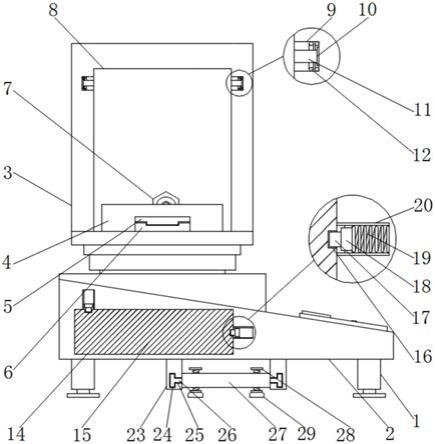
18.图1为本实用新型的正视图;
19.图2为本实用新型的俯视图。
20.图中标记:1-底板,2-支撑板,3-滑板,4-工作台,5-伺服电机,6-螺杆,7-螺纹轴套,8-球铰支座,9-第一电机,10-第二电机,11-第一轨道,12-第二轨道,13-芯片卡槽,14-高清相机。
具体实施方式
21.下面结合附图,对本实用新型作详细的说明。
22.为了使本实用新型的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本实用新型进行进一步详细说明。应当理解,此处所描述的具体实施例仅用以解释本实用新型,并不用于限定本实用新型。
23.如图1-2所示,找平装置包括底板1、支撑板2、滑板3、工作台4、调节机构、第一电机9、第二电机10、监测装置和控制模块,其中调节机构包括从下至上依次连接的伺服电机5、螺杆6、螺纹轴套7和球铰支座8。
24.底板1与支撑板2的连接方式可以是:底板1的上表面通过四个调节机构与支撑板2的下表面连接,这四个调节机构分别位于支撑板2四个角的下方;也可以是底板1的上表面通过三个调节机构和一个上端设有球铰支座的支撑杆与支撑板2的下表面连接,三个所述调节机构和支撑杆分别位于支撑板2四个角的下方。
25.监测装置、控制模块和伺服电机5依次电连接,监测装置可监测支撑板2的水平度,控制模块可基于监测装置的监测结果控制调节机构调节支撑板2至水平位置;监测装置可以是视觉识别系统,视觉识别系统包括电连接的高清相机14和视觉分析模组,高清相机14可对支撑板2拍照,视觉分析模组可基于上述拍照结果确定支撑板2相较于水平的倾斜方向及角度;监测装置还可以是陀螺仪传感器,陀螺仪传感器设于支撑板2上,该陀螺仪传感器用于确定支撑板2相较于水平的倾斜方向及角度。
26.滑块3设于支撑板2上方,并通过第一轨道11与支撑板2滑动连接,工作台4上表面中部设有芯片卡槽13,用于放置芯片,工作台4设于滑块3上方的,并通过第二轨道12与滑块3滑动连接,第一轨道11和第二轨道12相互垂直;第一电机9设于支撑板2上并与滑块3连接,第二电机10设于滑块3上并与工作台4连接,控制系统与第一电机9和第二电机10电连接,高清相机14可对工作台4拍照,视觉分析模组可基于拍照结果确定工作台4的位置相较于基准位置(基准位置是使得工作台4上的芯片对准上方焊接压头的位置)的偏差量,控制模块可基于所述偏差量控制第一电机9和第二电机10调节工作台4至基准位置;第一电机9和第二电机10可以分别为第一步进电机和第二步进电机,第一步进电机和第二步进电机均通过丝杠螺母副传动结构分别与滑块3和工作台4连接;第一电机9和第二电机10还可以分别为第一伺服电机和第二伺服电机,第一伺服电机和第二伺服电机均通过丝杠螺母副传动结构分别与滑块3和工作台4连接。
27.在使用时,需要先调节支撑板2至水平,即确保工作台4处于水平位置之后,再调节工作台4在水平面内的位置至基准位置,并且,上述调整过程根据工作台4的倾斜与偏移程度,可能进行多次反复监测及调整,直至工作台4最终位置满足预设要求。
28.采用前述技术方案的本实用新型,通过设置视觉识别系统或陀螺仪传感器监测支撑板的水平度,设置控制模块基于监测结果控制若干个伺服电机调节转动轴连接的螺杆与螺纹轴套的配合量,进而调节每个球铰支座支撑点的高低,若干个调节机构配合调节支撑板至水平位置,还通过视觉识别系统监测工作台在水平面内的位置,控制模块基于监测结果控制气缸调节工作台至基准位置,相比于现有技术中需人工调节工作台至水平位置及水平面内的基准位置,调整过程费时费力的问题,本实用新型可实现自动化调平,省时省力,且调整的精度较高,保证产品质量。
29.以上所述仅为本实用新型的较佳实施例而已,并不用以限制本实用新型,凡在本实用新型的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本实用新型
的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。