1.本实用新型涉及智能感知技术领域,具体为一种智能垃圾桶。
背景技术:
2.根据中国专利:“智能垃圾桶”,且公开号为:cn211140428u,该专利的智能垃圾桶基于蓝牙定位,通过定位计算出使用者位置,从而控制垃圾桶底盘运动到使用者身边,并且用人体红外线感应技术实现自动开关垃圾桶盖子,但是该专利主要是只解决了单一翻开垃圾桶盖子的问题,并不能实现垃圾袋自动打包更换的目的。
技术实现要素:
3.本实用新型的目的在于提供了一种智能垃圾桶,达到能智能垃圾桶封袋打包,更换垃圾袋且可以人体感应开盖的目的。
4.为实现上述目的,本实用新型提供如下技术方案:一种智能垃圾桶,包括垃圾箱,所述垃圾箱的顶部设置有二级翻盖,所述二级翻盖的内部为中空结构,所述二级翻盖的顶部设置有翻盖装置,所述二级翻盖的内部设置有自动封袋装置。
5.优选的,所述翻盖装置包括第一电机,第一转轴,第一正齿轮,半齿轮,垃圾桶盖板,第一铰链,所述第一电机固定安装在二级翻盖的中空内部,所述第一转轴通过联轴器固定连接在第一电机传动轴的外壁,所述第一正齿轮固定套设在第一转轴远离第一电机的外壁,所述垃圾桶盖板的外部通过第一铰链铰接在二级翻盖的外壁,所述半齿轮固定安装在垃圾桶盖板内壁。翻盖装置可以有自动在智能感应的情况下识别人体,打开和关闭垃圾桶盖板。
6.优选的,所述第一正齿轮和半齿轮啮合齿。第一正齿轮和半齿轮啮合可以使打开的垃圾桶盖板锁定,因为齿轮啮合有自锁效果。
7.优选的,所述自动封袋装置包括第二电机,第二转轴,主动锥形齿轮,从动锥形齿轮,往复丝杆,螺纹套,活动压杆,活动套,限位杆,热熔棒,所述第二电机固定安装在二级翻盖的中空内部,所述第二转轴通过联轴器固定连接在第二电机的传动轴上,所述主动锥形齿轮固定套设在远离第二电机的外壁,所述二级翻盖的内部固定分别固定安装有两个轴承,所述往复丝杆依次贯穿两个所述轴承与二级翻盖转动连接,所述从动锥形齿轮固定套设在往复丝杆的一端,所述螺纹套和活动套分别固定安装在活动压杆的两端,所述螺纹套螺纹连接在往复丝杆上,所述活动套伙同套设在限位杆的外壁,所述限位杆固定安装在二级翻盖的中空内壁,所述热熔棒固定安装在二级翻盖的内部。自动封袋装置在需要封袋时,可以直接自己将垃圾袋封口,切断,做到无需人工封袋,省时省事。
8.优选的,所述主动锥形齿轮和从动锥形齿轮啮合。主动锥形齿轮和从动锥形齿轮啮合,可以改变电机的传导方向,节省二级翻盖的中空内部空间。
9.优选的,所述二级翻盖的中空内部设置有垃圾袋模块,所述二级翻盖通过第二铰链铰接在垃圾箱的外壁,所述垃圾箱的外壁开设有通孔,所述通孔内设置有排气扇。垃圾袋
模块为定制无断口的垃圾袋,配合排气扇在大气压强的作用下,可以自动填充垃圾袋,无需人工换袋。
10.本实用新型提供了一种智能垃圾桶。具备以下有益效果:
11.(1)、本实用新型通过设置的自动封袋装置可以自动进行封袋,无需人工操作,节省人力,提高效率。
12.(2)、本实用新型通过设置的排气扇和特有的垃圾袋模块,可以自动更换垃圾袋,无需人工换袋,节省时间,提高人的舒适生活。
附图说明
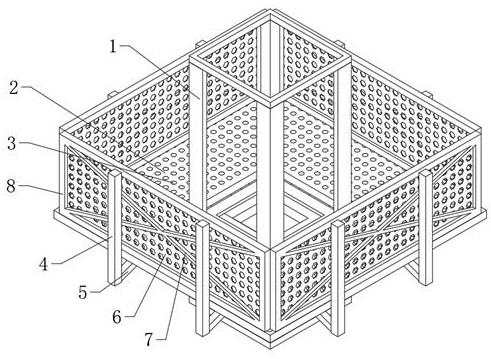
13.图1为本实用新型正视图;
14.图2为本实用新型二级翻盖俯视图;
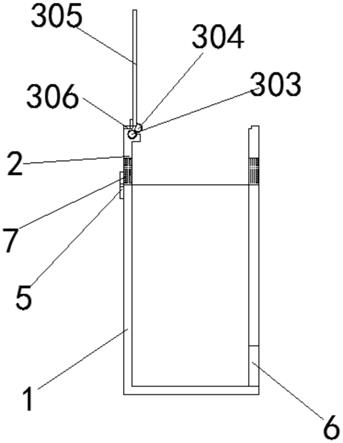
15.图3为本实用新型二级翻盖二级翻盖侧视图。
16.图中:1、垃圾箱;2、二级翻盖;3、翻盖装置;301、第一电机;302、第一转轴;303、第一正齿轮;304、半齿轮;305、垃圾桶盖板;306、第一铰链;4、自动封袋装置;401、第二电机;402、第二转轴;403、主动锥形齿轮;404、从动锥形齿轮;405、往复丝杆;406、螺纹套;407、活动压杆;408、活动套;409、限位杆;410、热熔棒;5、第二铰链;6、排气扇;7、垃圾袋模块。
具体实施方式
17.如图1-3所示,本实用新型提供一种技术方案:一种智能垃圾桶,包括垃圾箱1,垃圾箱1的顶部设置有二级翻盖2,二级翻盖2的内部为中空结构,中空的内部可以放置垃圾袋模块7和电机,看上去更美观,二级翻盖2的顶部设置有翻盖装置3,翻盖装置3包括第一电机301,第一转轴302,第一正齿轮303,半齿轮304,垃圾桶盖板305,第一铰链306,第一电机301固定安装在二级翻盖2的中空内部,第一转轴302通过联轴器固定连接在第一电机301传动轴的外壁,第一正齿轮303固定套设在第一转轴302远离第一电机301的外壁,垃圾桶盖板305的外部通过第一铰链306铰接在二级翻盖2的外壁,半齿轮304固定安装在垃圾桶盖板305内壁,第一正齿轮303和半齿轮304啮合,齿轮啮合,可以使得垃圾桶盖板305打开时有一个锁死,不会出现打开又晃动的情况,二级翻盖2的内部设置有自动封袋装置4,自动封袋装置4包括第二电机401,第二转轴402,主动锥形齿轮403,从动锥形齿轮404,往复丝杆405,螺纹套406,活动压杆407,活动套408,限位杆409,热熔棒410,第二电机401固定安装在二级翻盖2的中空内部,第二转轴402通过联轴器固定连接在第二电机401的传动轴上,主动锥形齿轮403固定套设在远离第二电机401的外壁,二级翻盖2的内部固定分别固定安装有两个轴承,往复丝杆405依次贯穿两个轴承与二级翻盖2转动连接,从动锥形齿轮404固定套设在往复丝杆405的一端,往复丝杆405可以使螺纹连接的螺纹套406转动,但是被限位杆409限位,使得与之固定的活动压杆407做往复运动,主动锥形齿轮403和从动锥形齿轮404啮合,主动锥形齿轮和从动锥形齿轮啮合,可以改变电机的传导方向,节省二级翻盖的中空内部空间,螺纹套406和活动套408分别固定安装在活动压杆407的两端,螺纹套406螺纹连接在往复丝杆405上,活动套408伙同套设在限位杆409的外壁,限位杆409固定安装在二级翻盖2的中空内壁,所述热熔棒410固定安装在二级翻盖2的内部,二级翻盖2的中空内部设置有垃圾袋模块7,二级翻盖2通过第二铰链5铰接在垃圾箱1的外壁,垃圾箱1的外壁开设有通孔,通孔内
设置有排气扇6,垃圾袋模块为定制无断口的垃圾袋,配合排气扇在大气压强的作用下,可以自动填充垃圾袋,无需人工换袋。
18.在使用时,当人经过垃圾桶的感应范围内时,由于第一电机301固定安装在二级翻盖2的中空内部,而第一转轴302通过联轴器固定连接在第一电机301传动轴的外壁,而第一正齿轮303固定套设在第一转轴302远离第一电机301的外壁一端,又因为半齿轮304是固定在垃圾桶盖板305的内壁,而垃圾桶盖板305的外壁通过第一铰链306固定连接在垃圾箱1的外壁,所以会有智能感应模块传达命令给第一电机301,使得第一电机301转动,由于第一正齿轮303和半齿轮304啮合,所以会使的垃圾桶盖板305打开,而由于第一正齿轮303和垃圾桶盖板305啮合,所以会使打开垃圾桶盖板305保持打开自锁状态,当人离开时,由智能感应模块感知,将命令传达给第一电机301,使得电机反转,关闭垃圾桶盖板305,当垃圾箱1中的垃圾装满时,通过打开二级翻盖2,会使得第二电机401转动,因为第二电机401也是固定安装在二级翻盖2的内部,且第二转轴402通过联轴器与第二电机401的传动轴固定连接,而主动锥形齿轮403又固定套设在第二转轴402的外壁,所以会带动主动锥形齿轮403转动,因为主动锥形齿轮403和从动锥形齿轮404啮合,从动锥形齿轮404固定在往复丝杆405的一端,往复丝杆405由两个轴承贯穿固定在二级翻盖2的内部,且螺纹套406螺纹连接在往复丝杆405上,而螺纹套406固定在活动压杆407的一端,活动压杆407的另一端固定了活动套408,且活动套408活动套设在限位杆409的外壁,热熔棒410固定安装在二级翻盖2的内部,所以在往复丝杆405的转动下,活动压杆407会向热熔棒410运动,热熔棒410在第二电机401工作时,会加热,将垃圾袋热熔且切断,当达到目的时,热熔棒410便会停止工作,活动压杆407又会恢复到原来位置,当提取走垃圾时,通过打开垃圾箱1内的排气扇6,排气扇6工作,将垃圾桶内部的空气排出,在外界压强的作用下,会使的垃圾袋模块7的垃圾袋迅速填充至垃圾箱1内,达到自动套袋的目的。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。