1.本实用新型属于人工智能技术领域,具体是指一种无人驾驶教学终端。
背景技术:
2.无人驾驶教学终端属于人工智能技术,目前人工智能技术已经在越来越多的行业当中广泛的应用,尤其是现在比较热门的无人驾驶领域当中,但是无人驾驶在教学当中的应用还是比较少见的,主要存在的技术问题是无人驾驶的车辆和传感器由于受尺寸的影响无法做成小型化,不利于课堂教学,学生在学习相关原理与技术时无法实操,只能通过教师口头教授不利于学生将理论与实际相结合。
技术实现要素:
3.为了解决上述难题,本实用新型提供了一种体积小重量轻,包含了无人驾驶领域当中常用的传感器和运算处理模块,能够满足基础的无人驾驶算法开发的无人驾驶教学终端。
4.为了实现上述功能,本实用新型采取的技术方案如下:一种无人驾驶教学终端,包括超声波距离检测模块、前大灯照明模块、电机驱动模块、gpu图像处理模块、核心板、电机和英伟达jetson nano模块,所述超声波距离检测模块通过4p的彩排线与核心板上的p6端口相连,所述前大灯照明模块与核心板端口相连,所述电机驱动模块与核心板端口相连,所述gpu图像处理模块与核心板端口相连,所述电机与电机驱动模块相连,所述英伟达jetson nano模块与核心板相连;通过超声波距离检测模块监测前方障碍物,摄像头实时采集路况信息,算法平台通过拟合超声波和摄像头信息做出行进路线规划,将无人驾驶汽车中所涉及到技术转化成能应用与日常教学中的实训设备,降低了成本与体积,与其他的无人驾驶教学终端相比,结构更简单模块更加丰富,并与人工智能技术高度契合。
5.进一步地,所述超声波测距模块上设有电源指示灯和分体式超声波传感器;接收频率可调,超声波发射端采用6级驱动输出,发射端采用调制技术发射功率更强,接收更灵敏,测量距离1m误差范围
±
1cm,超声波测距模块通过程序可水平180
°
旋转探测周围障碍物;
6.进一步地,所述分体式超声波传感器电路采用ne555芯片,ne555组成的方波产生电路,当单片机产生低电平信号,此时74hc14芯片会输出一个高电平信号,这个信号经过由74hc08,并与ne555产生的40khz方波“相与”此时这个方波通过74ls04组成的6反向器增大了驱动电流,用来驱动超声波发射头工作,当超声波接收端的解调电路接收到回波,会产生电平变化,编写程序时可以通过单片机产生低电平信号,使ne555产生的方波能够通过74hc08,此时应开启单片机的定时器并计时,当超声波接收端接收到回波时,关闭定时器,根据公式就可以算出当前障碍物与小车的距离。
7.进一步地,所述前大灯照明模块包括红外发射电路、前大灯模块、转向灯模块和光强度传感器。
8.进一步地,所述转向灯电路中包括三极管q1和三极管q2,转向灯电路工作原理如下:单片机与74hc14的输入管脚相连,当单片机输出低电平时经过由 74hc14变为高电平,此时三极管q1和三极管q3截止状态,电流无法通过这两个三极管流入到下方的led当中,所以转向灯无法点亮,当单片机输出高电平时74hc14输出低电平,此时三极管q1和q2导通,电流与led构成回路, led被点亮。
9.进一步地,所述红外发射电路采用ne555芯片,所述红外发射电路中设有调节滑动变阻器r9;ne555组成38khz载波发射电路,调节滑动变阻器r9可以改变载波频率,单片机与74hc14的5管脚相连,通过程序控制74hc14输出高、低电平,并与74hc08的载波信号(38khz方波信号)相乘(进行编码),此时红外信号完成编码后通过d3红外发射头发出红外编码。
10.进一步地,所述电机采用12v电机,所述电机与核心板相连;电机正极vcc 与核心板a01连接,电机负极gnd与核心板a02连接,霍尔传感器正极vcc 与 5v连接,霍尔传感器负极与gnd连接,电机码盘输出s1与原理图中的lefta 相连接。
11.进一步地,所述电机驱动模块采用tb6612电机芯片,tb6612电机芯片的控制逻辑表,单片机管脚p4.1、p5.2、p5.3、p5.4为控制电机的正反转,pwm 管脚为电机调速管脚,通过单片机改变pwm波形来控制电机的转速。
12.本实用新型采取上述结构取得有益效果如下:本实用新型提供的一种无人驾驶教学终端操作简单,机构紧凑,设计合理,无人驾驶教学终端将无人驾驶汽车当中的核心传感器和算法平台替换成超声波测距模块和英伟达jetson nano 模块,这样既满足教学需求又降低了成本,通过超声波监测前方障碍物,摄像头实时采集路况信息,算法平台通过拟合超声波和摄像头信息做出行进路线规划,将无人驾驶汽车中所涉及到技术转化成能应用与日常教学中的实训设备,降低了成本与体积,与其他的无人驾驶教学终端相比,结构更简单模块更加丰富,并与人工智能技术高度契合创新点如下:
13.1、体积更加小巧,不占用过多的面积;
14.2、能满足电子类和计算机类实训要求覆盖专业更广;
15.3、电机与控制端能够形成闭环反馈,控制精度更高。
附图说明
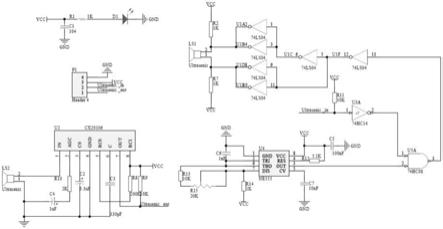
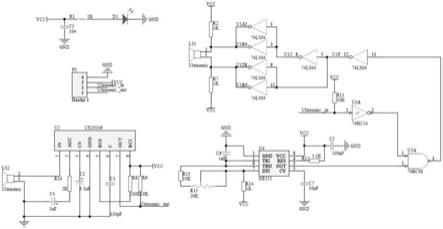
16.图1为本实用新型一种无人驾驶教学终端的超声波距离检测模块电路原理图;
17.图2为本实用新型一种无人驾驶教学终端的转向灯模块电路图;
18.图3为本实用新型一种无人驾驶教学终端的前大灯模块电路图;
19.图4为本实用新型一种无人驾驶教学终端的红外发射电路图;
20.图5为本实用新型一种无人驾驶教学终端的电机驱动模块电路图。
具体实施方式
21.下面将结合附图对本实用新型的技术方案进行清楚、完整地描述,显然,所描述的实施例是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
22.在本实用新型的描述中,需要说明的是,术语“中心”、“上”、“下”、“左”、“右”、“竖
直”、“水平”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。此外,术语“第一”、“第二”、“第三”仅用于描述目的,而不能理解为指示或暗示相对重要性。以下结合附图,对本实用新型做进一步详细说明。
23.如图1-5所示,本实用新型一种无人驾驶教学终端,包括超声波距离检测模块、前大灯照明模块、电机驱动模块、gpu图像处理模块、核心板、电机和英伟达jetson nano模块,所述超声波距离检测模块通过4p的彩排线与核心板上的 p6端口相连,所述前大灯照明模块与核心板端口相连,所述电机驱动模块与核心板端口相连,所述gpu图像处理模块与核心板端口相连,所述电机与电机驱动模块相连,所述英伟达jetson nano模块与核心板相连;超声波距离检测模块监测前方障碍物,英伟达jetson nano模块处理超声波数据和摄像头采集到的路况信息。
24.所述超声波测距模块上设有电源指示灯和分体式超声波传感器;接收频率可调,超声波发射端采用6级驱动输出,发射端采用调制技术发射,测量距离 1m,误差范围
±
1cm,超声波测距模块通过程序可水平180
°
旋转探测周围障碍物。
25.所述分体式超声波传感器电路采用ne555芯片;ne555组成的方波产生电路。
26.所述前大灯照明模块包括红外发射电路、前大灯模块、转向灯模块和光强度传感器。
27.所述转向灯电路中包括三极管q1和三极管q2。
28.所述红外发射电路采用ne555芯片,所述红外发射电路中设有调节滑动变阻器r9;ne555组成38khz载波发射电路,调节滑动变阻器r9改变载波频率。
29.所述电机采用12v电机,所述电机与核心板相连。
30.所述电机驱动模块采用tb6612电机芯片。
31.具体使用时
32.如图1所示超声波测距模块电路:长62mm宽35mm,板载电源指示灯,分体式超声波传感器,接收频率可调,超声波发射端采用6级驱动输出,发射端采用调制技术发射功率更强,接收更灵敏,测量距离1m误差范围
±
1cm。超声波板通过程序可水平180
°
旋转探测周围障碍物。
33.超声波传感器采用的由ne555组成的方波产生电路,当单片机产生低电平信号,此时74hc14芯片会输出一个高电平信号,这个信号经过由74hc08,并与ne555产生的40khz方波“相与”此时这个方波通过74ls04组成的6反向器增大了驱动电流,用来驱动超声波发射头工作,当超声波接收端的解调电路接收到回波,会产生电平变化,编写程序时可以通过单片机产生低电平信号,使ne555产生的方波能够通过74hc08,此时应开启单片机的定时器并计时,当超声波接收端接收到回波时,关闭定时器,根据公式就可以算出当前障碍物与小车的距离。
34.如图2所示转向灯电路:具体工作原理如下,单片机与74hc14的输入管脚相连,该芯片是一款高速cmos非门芯片,经常作为波形整形器用,这样能保证该芯片输出的高低电平的波形比较“陡峭”。当单片机输出低电平时经过由 74hc14变为高电平,此时三极管q1和q3截止状态,电流无法通过这两个三极管流入到下方的led当中,所以转向灯无法点亮,当
单片机输出高电平时 74hc14输出低电平,此时三极管q1和q2导通,电流与led构成回路,led 被点亮。
35.如图3所示前大灯电路:单片机的1.4管脚通过电阻r23与p沟道场效应管(芯片型号ao3401)相连,当单片机1.4管脚为低电平时场效应管导通,此时两个led大灯接通电流,大灯点亮。
36.如图4所示红外发射电路:该电路由ne555组成38khz载波发射电路,调节滑动变阻器r9可以改变载波频率,单片机与74hc14的5管脚相连,通过程序控制74hc14输出高、低电平,并与74hc08的载波信号(38khz方波信号) 相乘(进行编码),此时红外信号完成编码后通过d3红外发射头发出红外编码。
37.如图5所示电机驱动模块电路图:电机驱动模块主要功能是做电机驱动的,无人驾驶教学终端上的电机采用的是如下图所示的12v电机,电机正极vcc与核心板a01连接,电机负极gnd与核心板a02连接,霍尔传感器正极vcc与 5v连接,霍尔传感器负极与gnd连接,电机码盘输出s1与原理图中的lefta 相连接。
38.根据tb6612电机芯片的控制逻辑表,单片机管脚p4.1、p5.2、p5.3、p5.4 为控制电机的正反转,pwm管脚为电机调速管脚,通过单片机改变pwm波形来控制电机的转速。
39.英伟达jetson nano与电机驱动板:本项目采用的运算平台是英伟达的jetsonnano,该模块负责处理超声波数据和摄像头采集到的路况信息,通过算法优化行进路线并将需要电机做出反应的转速与方向,通过串口与底层电机驱动板进行通讯。
40.以上对本实用新型及其实施方式进行了描述,这种描述没有限制性,附图中所示的也只是本实用新型的实施方式之一,实际的结构并不局限于此。总而言之如果本领域的普通技术人员受其启示,在不脱离本实用新型创造宗旨的情况下,不经创造性的设计出与该技术方案相似的结构方式及实施例,均应属于本实用新型的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。