1.本发明涉及模拟训练系统技术领域,尤其涉及一种虚拟现实高仿真模拟训练系统。
背景技术:
2.模拟训练主要指利用计算机仿真技术,对实际操作环境进行计算机模拟,用于培训所在领域的专业人员进行相关操作。相对于真实训练,模拟训练往往不受场地、时间等客观条件的限制,训练费用也相对较低,因此被日渐广泛地应用于医疗、军事等领域的日常训练中,作为真实训练的有效辅助手段,在装甲方面同样需要模拟训练系统进行模拟训练。
3.现有技术中的装甲模拟系统,vr眼镜的放置位置固定,不方便取放,无法调节方向盘位置,导致训练人员操作不方便,导致体验效果较差,为此我们提出了一种虚拟现实高仿真模拟训练系统。
技术实现要素:
4.本发明的目的是为了解决现有技术中存在使用不便,体验效果较差的缺点,而提出的一种虚拟现实高仿真模拟训练系统。
5.为了实现上述目的,本发明采用了如下技术方案:
6.一种虚拟现实高仿真模拟训练系统,包括模拟仓,所述模拟仓内设置有架板,所述架板上固定安装有座椅,所述架板上固定安装有电机,所述电机的输出轴上固定安装有转杆,所述转杆上固定安装有第一带轮,所述座椅上固定安装有承载箱,所述承载箱内转动安装有第二带轮,所述第一带轮和第二带轮上传动安装有同一个第一皮带,所述模拟仓内设置有固定机构,所述固定机构包括第一锥齿轮,所述第一锥齿轮与第二带轮固定连接,所述第一锥齿轮上啮合有第二锥齿轮,所述第二锥齿轮上固定安装有第三带轮,所述承载箱内转动安装有轴杆,所述轴杆上固定安装有第四带轮,所述第三带轮和第四带轮上传动安装有同一个第二皮带,所述轴杆上固定安装有腰板,腰板与座椅相互配合,所述模拟仓内设置有推送机构,所述推送机构包括第三锥齿轮,所述第三锥齿轮与转杆固定连接,所述第三锥齿轮上啮合有第四锥齿轮,所述第四锥齿轮上固定安装有第一螺杆,所述第一螺杆上螺纹连接有推板,所述推板上固定安装有放置盘,所述放置盘上设置有ar眼罩,所述转杆上固定安装有第五带轮,所述架板上转动安装有第六带轮,所述第五带轮和第六带轮上传动安装有同一个第三皮带,所述模拟仓内设置有调节机构,所述调节机构包括第二螺杆,所述第二螺杆与第六带轮固定连接,所述第二螺杆上螺纹连接有支撑筒,所述支撑筒内转动安装有第三螺杆,所述第三螺杆上螺纹连接有安装板,所述安装板上设置有方向盘,所述第三螺杆上固定安装有第五锥齿轮,所述第五锥齿轮上啮合有第六锥齿轮,所述第六锥齿轮上固定安装有调节杆,所述调节杆上固定安装有转柄。
7.优选的,所述架板上设置有操作台,操作台上设置有多个按钮,架板上设置有刹车板,架板上设置有多个传感器,模拟仓上转动安装有仓门,模拟仓内设置有显示屏。
8.优选的,所述模拟仓内设置有储存模块、记录模块、感应模块、运动模块、显示模块和控制模块,所述储存模块和记录模块均与控制模块双向连接,所述感应模块、运动模块和显示模块均与控制模块线性连接。
9.优选的,所述架板上固定安装有第一轴承,第一轴承的内圈与第一螺杆的外侧固定连接。
10.优选的,所述模拟仓内设置有多个气缸,多个气缸的伸缩杆均与座椅转动连接,多个气缸均与运动模块线性连接。
11.优选的,所述架板上设置有纵轨,纵轨与推板滑动连接。
12.优选的,所述承载箱内固定安装有第二轴承,第二轴承的内圈与第二带轮的一侧固定连接。
13.优选的,所述架板上设置有横轨,横轨与支撑筒滑动连接。
14.优选的,所述架板上固定安装有第三轴承,第三轴承的内圈与第二螺杆的外侧固定连接。
15.优选的,所述支撑筒内设置有槽轨,槽轨与安装板滑动连接。
16.优选的,所述支撑筒内固定安装有第四轴承,第四轴承的内圈与第三螺杆的外侧固定连接。
17.优选的,所述感应模块包括数据接收单元、数据处理单元和数据发送单元,数据接收单元和数据发送单元均与数据处理单元线性连接,记录模块包括视屏录制单元、视屏处理单元和视屏发送单元,视屏录制单元和视屏发送单元均与视屏处理单元线性连接,运动模块包括命令接收单元、命令处理单元和命令发送单元,命令接收单元和命令发送单元均与命令处理单元线性连接,人员进行训练时,控制模块控制显示模块显示的不同情景,训练人员做出不同操作,通过感应模块感应操作项目,控制模块控制运动模块做出装甲车遇到同种情况时车体的震动状态,例如不同路面的颠簸,开主炮和副炮时的后坐力感应,刹车时的骤停状态等,控制模块控制记录模块记录训练时不同场景,训练人员的操作反应以及身体情况,同时控制储存模块进行储存,方便后面训练人员观看,能够发现训练时的不足,方便改正,模拟仓内设置有人机交互模块,包括手势、语音、眼动、触觉、体感等识别功能,人机交互模块支持命令词识别和连续语音识别,基于特定语库的命令词识别词汇量》10000,90分贝以上高噪声环境:命令词语音识别率≥95%,支持非特定人非标准普通话的语音变异补偿,语音识别引擎支持国产化嵌入式平台,支持肌电、运动、视觉多模态传感器的融合手势识别,运动传感器采样延迟0.01秒,视觉传感器采样延迟0.05秒,肌电传感器采样延迟0.001秒,识别率》95%,支持自定义静态和动态手势不少于30种,支持分队规模室外场地(1000米
×
1000米)实时单人动作捕捉和识别,支持大场景虚实图像空间配准,显示帧率不低于30帧/秒,支持针对虚拟物体的语音、手势交互能力,给出用户交互效能评价指标体系,对典型任务场景下的手势、语音、动作通道给出认知负荷量表,连续健康沉浸时间30分钟以上,疲劳度增加不超过10%,沉浸感得以大幅提高,更高的维度会让我们接受到的信息更多,音频通过语气就能表现出很多内容,它的维度比文字要高,有声音和语言两种。视频的维度就更高,增加了影像,可以更迅速直观的表现场景。vr的优势之一就是具有更高的维度,相比传统的训练方式,它具备360度全景画面,战士可以身临其境,通过声音、画面、触感、惯性等全面感受训练氛围,空间感、距离感都更有层次,大大提高了训练的真实度,体感
技术让训练更逼真,vr技术并不只是将视频内容从平面显示器转移到面部眼镜上那么简单,它的先进之处在于可以利用大量的体感技术以及平台技术,使参训人员的细微动作都可以被捕捉到,并迅速反应到虚拟装备上,丰富了训练模式缩短了组训时间,通过将驾驶、射击、通信指挥各操作部件采用虚拟形式模拟出来,可以完美实现训练大纲中规定的实习课目,让参训者在不受地域、环境、场所的限制,随时随地开展认知、拆装、维修等训练课目。vr技术在一定程度上减少了产品的繁琐安装,缩短了组训的准备时间,大幅提高了产品的灵活性,节约了训练成本提高了安全性,采用vr技术结合三维图像即时生成技术对虚拟环境以及装备、耗材的构建,相较于传统的训练形式,可以节省大量实体部件以及耗材的损耗。同时可以极大限度降低因为误操作而导致的装备损坏和人员伤亡,保证了训练安全性。
18.与现有技术相比,本发明的优点在于:
19.1、本方案在使用时,固定机构的设置能够将训练人员固定在座椅上,避免训练时训练人员的动作幅度太大,或者模拟场景的运动幅度太大,导致训练人员跌伤,训练更加安全。
20.2、本方案在使用时,推送机构的设置,能够把ar眼罩推送到训练人员的面前,方便训练人员取用佩戴,训练时,收回放置盘,避免放置盘影响训练人员的操作训练。
21.3、本方案在使用时,调节机构的设置能够把调节方向盘的位置,收起时,方便训练人员进入模拟仓,调出时,方便训练人员操作,同时能够对方向盘的距离进行微调,使得训练人员使用时更加舒适,固定机构、推送机构和调节机构通过一个电机带动,避免使用多个电机造成资源浪费。
22.本发明能够提高舒适度,体验效果更佳,使得训练人员能够加长训练时间,提高训练效果,使用简单,操作方便。
附图说明
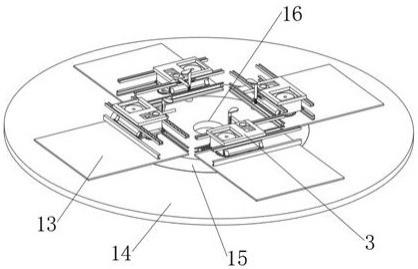
23.图1为本发明提出的一种虚拟现实高仿真模拟训练系统的立体结构示意图;
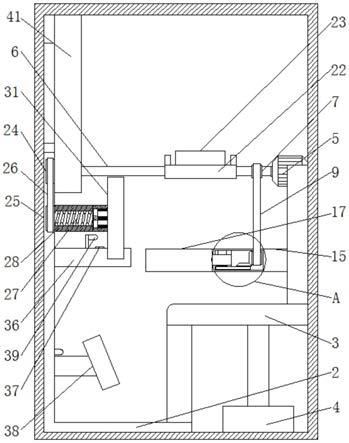
24.图2为本发明提出的一种虚拟现实高仿真模拟训练系统的实施例一的剖视结构示意图;
25.图3为本发明提出的一种虚拟现实高仿真模拟训练系统的图2的部分俯视结构示意图;
26.图4为本发明提出的一种虚拟现实高仿真模拟训练系统的图2中a部分的放大结构示意图;
27.图5为本发明提出的一种虚拟现实高仿真模拟训练系统的图3中b部分的放大结构示意图;
28.图6为本发明提出的一种虚拟现实高仿真模拟训练系统的原理框图;
29.图7为本发明提出的一种虚拟现实高仿真模拟训练系统的感应模块原理框图;
30.图8为本发明提出的一种虚拟现实高仿真模拟训练系统的记录模块原理框图;
31.图9为本发明提出的一种虚拟现实高仿真模拟训练系统的运动模块原理框图;
32.图10为本发明提出的一种虚拟现实高仿真模拟训练系统的实施例二的剖视结构示意图。
33.图中:1模拟仓、2架板、3座椅、4气缸、5电机、6转杆、7第一带轮、8第二带轮、9第一
皮带、10第一锥齿轮、11第二锥齿轮、12第三带轮、13第四带轮、14第二皮带、15承载箱、16轴杆、17腰板、18第三锥齿轮、19第四锥齿轮、20第一螺杆、21推板、22放置盘、23ar眼罩、24第五带轮、25第六带轮、26第三皮带、27第二螺杆、28支撑筒、29第三螺杆、30安装板、31方向盘、32第五锥齿轮、33第六锥齿轮、34调节杆、35转柄、36操作台、37按钮、38刹车板、39传感器、40仓门、41显示屏、42坐垫、43腰垫。
具体实施方式
34.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。
35.实施例一
36.参照图1-9,一种虚拟现实高仿真模拟训练系统,包括模拟仓1,模拟仓1内设置有架板2,架板2上固定安装有座椅3,架板2上固定安装有电机5,电机5的输出轴上固定安装有转杆6,转杆6上固定安装有第一带轮7,座椅3上固定安装有承载箱15,承载箱15内转动安装有第二带轮8,第一带轮7和第二带轮8上传动安装有同一个第一皮带9,模拟仓1内设置有固定机构,固定机构包括第一锥齿轮10,第一锥齿轮10与第二带轮8固定连接,第一锥齿轮10上啮合有第二锥齿轮11,第二锥齿轮11上固定安装有第三带轮12,承载箱15内转动安装有轴杆16,轴杆16上固定安装有第四带轮13,第三带轮12和第四带轮13上传动安装有同一个第二皮带14,轴杆16上固定安装有腰板17,腰板17与座椅3相互配合,模拟仓1内设置有推送机构,推送机构包括第三锥齿轮18,第三锥齿轮18与转杆6固定连接,第三锥齿轮18上啮合有第四锥齿轮19,第四锥齿轮19上固定安装有第一螺杆20,第一螺杆20上螺纹连接有推板21,推板21上固定安装有放置盘22,放置盘22上设置有ar眼罩23,转杆6上固定安装有第五带轮24,架板2上转动安装有第六带轮25,第五带轮24和第六带轮25上传动安装有同一个第三皮带26,模拟仓1内设置有调节机构,调节机构包括第二螺杆27,第二螺杆27与第六带轮25固定连接,第二螺杆27上螺纹连接有支撑筒28,支撑筒28内转动安装有第三螺杆29,第三螺杆29上螺纹连接有安装板30,安装板30上设置有方向盘31,第三螺杆29上固定安装有第五锥齿轮32,第五锥齿轮32上啮合有第六锥齿轮33,第六锥齿轮33上固定安装有调节杆34,调节杆34上固定安装有转柄35。
37.本发明中,模拟仓1内设置有储存模块、记录模块、感应模块、运动模块、显示模块和控制模块,储存模块和记录模块均与控制模块双向连接,感应模块、运动模块和显示模块均与控制模块线性连接。
38.本发明中,模拟仓1内设置有多个气缸4,多个气缸4的伸缩杆均与座椅3转动连接,多个气缸4均与运动模块线性连接。
39.本发明中,架板2上设置有操作台36,操作台36上设置有多个按钮37,架板2上设置有刹车板38,架板2上设置有多个传感器39,模拟仓1上转动安装有仓门40,模拟仓1内设置有显示屏41。
40.本发明中,架板2上设置有纵轨,纵轨与推板21滑动连接,纵轨能够使得推板21在固定位置滑动。
41.本发明中,架板2上设置有横轨,横轨与支撑筒28滑动连接,横轨能够使得支撑筒28在固定位置滑动。
42.本发明中,支撑筒28内设置有槽轨,槽轨与安装板30滑动连接,槽轨能够使得安装板30在固定位置滑动。
43.本发明中,架板2上固定安装有第一轴承,第一轴承的内圈与第一螺杆20的外侧固定连接,第一轴承能够使得第一螺杆20在固定位置转动。
44.本发明中,承载箱15内固定安装有第二轴承,第二轴承的内圈与第二带轮8的一侧固定连接,第二轴承能够使得第二带轮8在固定位置转动。
45.本发明中,架板2上固定安装有第三轴承,第三轴承的内圈与第二螺杆27的外侧固定连接,第三轴承能够使得第二螺杆27在固定位置转动。
46.本发明中,支撑筒28内固定安装有第四轴承,第四轴承的内圈与第三螺杆29的外侧固定连接,第四轴承能够使得第三螺杆29在固定位置转动。
47.本发明中,感应模块包括数据接收单元、数据处理单元和数据发送单元,数据接收单元和数据发送单元均与数据处理单元线性连接,记录模块包括视屏录制单元、视屏处理单元和视屏发送单元,视屏录制单元和视屏发送单元均与视屏处理单元线性连接,运动模块包括命令接收单元、命令处理单元和命令发送单元,命令接收单元和命令发送单元均与命令处理单元线性连接。
48.工作原理:使用时,打开仓门40,坐在座椅3上,从放置板22上取下ar眼罩23并戴在头上,打开电机5,进而带动转杆6转动,转杆6转动,进而带动第一带轮7转动,在第一皮带9的配合下,第一带轮7转动,进而带动第二带轮8转动,第二带轮8转动,进而带动第一锥齿轮10转动,第一锥齿轮10转动,进而带动第二锥齿轮11转动,第二锥齿轮11转动,进而带动第三带轮12转动,在第二皮带14的配合下,第三带轮12转动,进而带动第四带轮13转动,第四带轮13转动,进而带动轴杆16转动,轴杆16转动,进而带动腰板17转动,卡在训练者腰部进行固定,轴杆6转动,进而带动第三锥齿轮18转动,第三锥齿轮18转动,进而带动第四锥齿轮19转动,第四锥齿轮19转动,进而带动第一螺杆20转动,第一螺杆20转动,进而带动推板21滑动,推板21滑动,进而带动放置板22滑动收起,避免影响训练人员训练,转杆6转动,进而带动第五带轮24转动,在第三皮带26的配合下,第五带轮24转动,进而带动第六带轮25转动,第六带轮25转动,进而带动第二螺杆27转动,第二螺杆27转动,进而带动支撑筒28滑动,顶出方向盘31,方便训练者模拟驾驶,当方向盘31位置不太合适时,可以转动转柄35,进而带动调节杆34转动,调节杆34转动,进而带动第六锥齿轮33转动,第六锥齿轮33转动,进而带动第五锥齿轮32转动,第五锥齿轮32转动,进而带动第三螺杆29转动,第三螺杆29转动,进而带动安装板30滑动,使得方向盘31可以向左或者向右进行微调,使得训练者更加舒适,此时可以进行训练,通过传感器39感应训练者的操作反馈到感应模块,通过控制模块控制运动模块做出各种反应,达到训练的目的,训练完成后,反转电机5,训练者走出模拟仓即可。
49.实施例二
50.参照图6-10,与实施例一的区别在于:包括模拟仓1,模拟仓1内设置有储存模块、记录模块、感应模块、运动模块、显示模块和控制模块,储存模块和记录模块均与控制模块双向连接,感应模块、运动模块和显示模块均与控制模块线性连接,模拟仓1内设置有架板2,架板2上固定安装有座椅3,座椅3上设置有坐垫42,模拟仓1内设置有多个气缸4,多个气缸4的伸缩杆均与座椅3转动连接,多个气缸4均与运动模块线性连接,架板2上固定安装有
电机5,电机5的输出轴上固定安装有转杆6,转杆6上固定安装有第一带轮7,座椅3上固定安装有承载箱15,承载箱15内转动安装有第二带轮8,第一带轮7和第二带轮8上传动安装有同一个第一皮带9,模拟仓1内设置有固定机构和推送机构,转杆6上固定安装有第五带轮24,架板2上转动安装有第六带轮25,第五带轮24和第六带轮25上传动安装有同一个第三皮带26,模拟仓1内设置有调节机构。
51.本发明中,固定机构包括第一锥齿轮10,第一锥齿轮10与第二带轮8固定连接,第一锥齿轮10上啮合有第二锥齿轮11,第二锥齿轮11上固定安装有第三带轮12,承载箱15内转动安装有轴杆16,轴杆16上固定安装有第四带轮13,第三带轮12和第四带轮13上传动安装有同一个第二皮带14,轴杆16上固定安装有腰板17,腰板17与座椅3相互配合,腰板17上设置有腰带43。
52.工作原理:使用时,打开仓门40,坐在座椅3上的坐垫42上,使得训练者坐着更舒适,从放置板22上取下ar眼罩23并戴在头上,打开电机5,进而带动转杆6转动,转杆6转动,进而带动第一带轮7转动,在第一皮带9的配合下,第一带轮7转动,进而带动第二带轮8转动,第二带轮8转动,进而带动第一锥齿轮10转动,第一锥齿轮10转动,进而带动第二锥齿轮11转动,第二锥齿轮11转动,进而带动第三带轮12转动,在第二皮带14的配合下,第三带轮12转动,进而带动第四带轮13转动,第四带轮13转动,进而带动轴杆16转动,轴杆16转动,进而带动腰板17转动,使得腰板17上的腰带43卡在训练者腰部进行固定,提高舒适度,轴杆6转动,进而带动第三锥齿轮18转动,第三锥齿轮18转动,进而带动第四锥齿轮19转动,第四锥齿轮19转动,进而带动第一螺杆20转动,第一螺杆20转动,进而带动推板21滑动,推板21滑动,进而带动放置板22滑动收起,避免影响训练人员训练,转杆6转动,进而带动第五带轮24转动,在第三皮带26的配合下,第五带轮24转动,进而带动第六带轮25转动,第六带轮25转动,进而带动第二螺杆27转动,第二螺杆27转动,进而带动支撑筒28滑动,顶出方向盘31,方便训练者模拟驾驶,当方向盘31位置不太合适时,可以转动转柄35,进而带动调节杆34转动,调节杆34转动,进而带动第六锥齿轮33转动,第六锥齿轮33转动,进而带动第五锥齿轮32转动,第五锥齿轮32转动,进而带动第三螺杆29转动,第三螺杆29转动,进而带动安装板30滑动,使得方向盘31可以向左或者向右进行微调,使得训练者更加舒适,此时可以进行训练,通过传感器39感应训练者的操作反馈到感应模块,通过控制模块控制运动模块做出各种反应,达到训练的目的,训练完成后,反转电机5,训练者走出模拟仓即可。
53.其余与实施例一相同。
54.以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。