1.本发明涉及螺丝刀领域,尤其涉及一种操作工位可调节的自动螺丝刀。
背景技术:
2.在现实情况中,有一些圆形工件需要进行拧螺丝的处理,但是由于每个螺丝所在的位置不同,导致螺丝刀的角度也要随之发生变化,人工操作较为困难,并且一些狭小位置处的螺丝,人工无法顺利拧起;
3.其次,当工件较大,且螺丝数量较多时,人工拧起效率远远低于机器效率,并且需要不断变化位置,调整螺丝刀角度。
技术实现要素:
4.为了克服每个螺丝所在的位置不同,导致螺丝刀的角度也要随之发生变化,人工操作困难,并且一些狭小位置处的螺丝,人工无法顺利拧起的缺点,本发明提供一种操作工位可调节的自动螺丝刀。
5.技术方案是:一种操作工位可调节的自动螺丝刀,包括有固定底座、气动螺丝刀、角度调节组件和障碍避开组件;固定底座共设置有两个,两个固定底座上表面安装有用于调整调节角度的角度调节组件;角度调节组件右侧安装有气动螺丝刀;角度调节组件右侧安装有用于避开障碍的障碍避开组件,并且障碍避开组件位于气动螺丝刀的外侧。
6.进一步,角度调节组件包括有第一滑轨、第一驱动件、第一连接板、第一弹性件、第二连接板、第二弹性件、安装板、第二滑轨、第二驱动件、第一电动转轴、第一t形板、第二t形板、第三滑轨、第三驱动件、调节框、z形板、连接杆、第一l形板、第四驱动件和压块;两个固定底座上表面连接有第一滑轨;第一滑轨内滑连接有第一驱动件;第一驱动件上表面连接有第一连接板;第一连接板上侧面连接有第一弹性件;第一弹性件上表面中部连接有第二连接板;第一弹性件伸缩端连接有安装板;第二连接板上侧面连接有第二弹性件;第二弹性件伸缩端连接安装板;安装板左侧面连接有第二滑轨;安装板下侧连接障碍避开组件;第二滑轨内滑动连接有第二驱动件;第二驱动件左侧安装有第一电动转轴;第一电动转轴输出端连接有第一t形板;第一t形板左侧连接有第二t形板;第二t形板下表面连接有第三滑轨;第二t形板右侧面前部连接有z形板;第三滑轨内滑动连接有第三驱动件;第三驱动件下侧通过扭力弹簧杆活动连接有调节框;z形板下侧转动连接有连接杆;连接杆左侧面连接气动螺丝刀;气动螺丝刀上部左侧连接有第一l形板;第一l形板左侧下部连接有第四驱动件;第四驱动件伸缩端连接有压块。
7.进一步,压块位于气动螺丝刀启动开关的左方。
8.进一步,障碍避开组件包括有第二l形板、第三连接板和u形防护板;安装板通过扭力弹簧杆前侧活动连接有第二l形板;安装板通过扭力弹簧杆后侧活动连接有第三连接板;第二l形板和第三连接板左侧面之间连接有u形防护板。
9.进一步,u形防护板位于气动螺丝刀的外侧。
10.进一步,还包括有清洁组件,气动螺丝刀下侧安装有清洁组件,清洁组件包括有第三l形板、第四滑轨、第五驱动件、收集框、环形块、清理器和限位板;气动螺丝刀外表面下侧连接有第三l形板;第三l形板右侧内壁连接有第四滑轨;第四滑轨内滑动连接有第五驱动件;第五驱动件左侧面连接有收集框;收集框左侧连接有环形块;环形块内侧设置有四个呈环形阵列的清理器;环形块下侧连接有两个前后对称的限位板。
11.进一步,环形块对应于收集框的位置开设有一个缺口。
12.进一步,四个清理器均为软性材料,并且组合之后呈漏斗状。
13.进一步,还包括有滑丝处理组件,第三l形板右侧安装有滑丝处理组件,滑丝处理组件包括有第四l形板、第二电动转轴、传动轴、第三弹性件、第四连接板和辅助器;第三l形板右侧面连接有第四l形板;第三l形板中部转动连接有传动轴;第四l形板前侧安装有第二电动转轴;第二电动转轴输出端连接传动轴;传动轴外表面连接有两个第三弹性件;两个第三弹性件上端面各连接有一个第四连接板;两个第四连接板之间安装有辅助器。
14.进一步,辅助器是具有形变能力的橡胶等材质。
15.本发明的有益效果为:本发明实现了自动对螺丝进行处理的同时,能够不断调节螺丝刀的操作位置和角度,进而使得螺丝刀能够适应不同角度和位于狭小空间内的螺丝,并且同时能够清理螺丝刀的拧起端,防止其拧起端存在杂质,影响工作,并且消除人工拧螺丝时将螺丝完全带起,使其掉落丢失的问题,同时对滑丝的螺丝进行特殊处理,使其能够顺利被拧起的效果。
附图说明
16.图1为本发明操作工位可调节的自动螺丝刀的主视图;
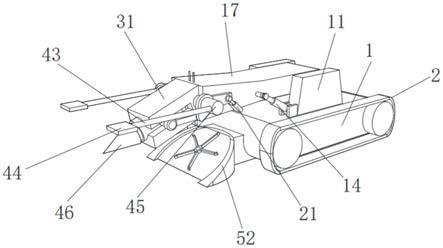
17.图2为本发明操作工位可调节的自动螺丝刀的立体结构示意图;
18.图3为本发明操作工位可调节的自动螺丝刀的部分立体结构示意图;
19.图4为本发明操作工位可调节的自动螺丝刀的组合立体结构示意图
20.图5为本发明操作工位可调节的自动螺丝刀的角度调节组件第一种部分组合立体结构示意图;
21.图6为本发明操作工位可调节的自动螺丝刀的角度调节组件第二种部分立体结构示意图;
22.图7为本发明操作工位可调节的自动螺丝刀的障碍避开组件第一种部分立体结构示意图;
23.图8为本发明操作工位可调节的自动螺丝刀的障碍避开组件第二种部分立体结构示意图;
24.图9为本发明操作工位可调节的自动螺丝刀的清洁组件第一种立体结构示意图;
25.图10为本发明操作工位可调节的自动螺丝刀的清洁组件第二种立体结构示意图;
26.图11为本发明操作工位可调节的自动螺丝刀的滑丝处理组件第一种立体结构示意图;
27.图12为本发明操作工位可调节的自动螺丝刀的滑丝处理组件第二种立体结构示意图。
28.图中零部件名称及序号:1-固定底座,2-气动螺丝刀,201-第一滑轨,202-第一驱
动件,203-第一连接板,204-第一弹性件,205-第二连接板,206-第二弹性件,207-安装板,208-第二滑轨,209-第二驱动件,2010-第一电动转轴,2011-第一t形板,2012-第二t形板,2013-第三滑轨,2014-第三驱动件,2015-调节框,2016-z形板,2017-连接杆,2018-第一l形板,2019-第四驱动件,2020-压块,301-第二l形板,302-第三连接板,303-u形防护板,401-第三l形板,402-第四滑轨,403-第五驱动件,404-收集框,405-环形块,406-清理器,407-限位板,501-第四l形板,502-第二电动转轴,503-传动轴,504-第三弹性件,505-第四连接板,506-辅助器。
具体实施方式
29.现在将参照附图在下文中更全面地描述本发明,在附图中示出了本发明当前优选的实施方式。然而,本发明可以以许多不同的形式实施,并且不应被解释为限于本文所阐述的实施方式;而是为了透彻性和完整性而提供这些实施方式,并且这些实施方式将本发明的范围充分地传达给技术人员。
30.实施例1
31.一种操作工位可调节的自动螺丝刀,如图1-8所示,包括有固定底座1、气动螺丝刀2、角度调节组件和障碍避开组件;固定底座1共设置有两个,两个固定底座1上表面安装有角度调节组件;角度调节组件右侧安装有气动螺丝刀2;角度调节组件右侧安装有障碍避开组件,并且障碍避开组件位于气动螺丝刀2的外侧。
32.角度调节组件包括有第一滑轨201、第一驱动件202、第一连接板203、第一弹性件204、第二连接板205、第二弹性件206、安装板207、第二滑轨208、第二驱动件209、第一电动转轴2010、第一t形板2011、第二t形板2012、第三滑轨2013、第三驱动件2014、调节框2015、z形板2016、连接杆2017、第一l形板2018、第四驱动件2019和压块2020;两个固定底座1上表面焊接有第一滑轨201;第一滑轨201内滑连接有第一驱动件202;第一驱动件202上表面螺栓连接有第一连接板203;第一连接板203上侧面焊接有第一弹性件204;第一弹性件204上表面中部焊接有第二连接板205;第一弹性件204伸缩端固接有安装板207;第二连接板205上侧面焊接有第二弹性件206;第二弹性件206伸缩端固接安装板207;安装板207左侧面焊接有第二滑轨208;安装板207下侧连接障碍避开组件;第二滑轨208内滑动连接有第二驱动件209;第二驱动件209左侧安装有第一电动转轴2010;第一电动转轴2010输出端固接有第一t形板2011;第一t形板2011左侧焊接有第二t形板2012;第二t形板2012下表面焊接有第三滑轨2013;第二t形板2012右侧面前部螺栓连接有z形板2016;第三滑轨2013内滑动连接有第三驱动件2014;第三驱动件2014下侧通过扭力弹簧杆铰接有调节框2015;z形板2016下侧转动连接有连接杆2017;连接杆2017左侧面固接气动螺丝刀2;气动螺丝刀2上部左侧固接有第一l形板2018;第一l形板2018左侧下部螺栓连接有第四驱动件2019;第四驱动件2019伸缩端焊接有压块2020。
33.压块2020位于气动螺丝刀2启动开关的左方。
34.障碍避开组件包括有第二l形板301、第三连接板302和u形防护板303;安装板207通过扭力弹簧杆前侧铰接有第二l形板301;安装板207通过扭力弹簧杆后侧铰接有第三连接板302;第二l形板301和第三连接板302左侧面之间焊接有u形防护板303。
35.u形防护板303位于气动螺丝刀2的外侧。
36.准备工作前,先将气动螺丝刀2安装固定,固定完成后,根据需要处理螺丝的角度不同,有的螺丝处于被障碍物阻挡的狭小空间内,因此需要对气动螺丝刀2的角度进行适当调节,使得气动螺丝刀2能够对不同角度和被障碍物阻挡在狭小空间内的螺丝进行处;
37.随着需要处理螺丝的角度改变,或者处于被障碍物阻挡得狭小空间内时,根据螺丝的角度对气动螺丝刀2进行调节,使得气动螺丝刀2能够调节到适应情况得角度,当需要调节角度时,以从左向右看为基准,从左至右为横向,由上至下为纵向,通过控制第一电动转轴2010开始工作,第一电动转轴2010带动第一t形板2011转动,进而通过第一t形板2011带动第二t形板2012转动,通过第二t形板2012带动z形板2016转动,z形板2016带动连接杆2017转动,然后通过连接杆2017带动气动螺丝刀2转动,根据需要处理得螺丝的角度,使得气动螺丝刀2在纵向方向调节角度,与此同时,当气动螺丝刀2需要纵向调节的角度较大时,气动螺丝刀2会与第二l形板301接触,并且使得第二l形板301绕着扭力弹簧杆发生转动,进而使得气动螺丝刀2不会被第二l形板301所阻碍,导致无法在纵向方向调整到合适角度;
38.当螺丝处于障碍物所阻碍的狭小空间内,需要在横向调节角度时,控制第三驱动件2014开始工作,第三驱动件2014是电动滑块,根据需要调节的角度,控制第三驱动件2014带动调节框2015向左或向右移动,调节框2015移动的同时,调节框2015同时拨动气动螺丝刀2发生横向角度偏转,即使得气动螺丝刀2绕着连接杆2017的中心点发生偏转,与此同时,若气动螺丝刀2需要横向调节的角度较大时,为了防止调节框2015限制其角度偏转值,因此,当气动螺丝刀2在横向调节到某个角度后,调节框2015继续带动气动螺丝刀2调节角度时,气动螺丝刀2同时会使得调节框2015绕着扭力弹簧干发生偏转,使得气动螺丝刀2能够有更大的空间进行横向角度的调节,进而确保气动螺丝刀2能够顺利调节到合适角度;
39.当气动螺丝刀2的纵向和横向角度均调节完成后,控制第二驱动件209开始工作,第二驱动件209是电动滑块,第二驱动件209带动第一电动转轴2010向靠近螺丝移动,即带动气动螺丝刀2向靠近螺丝移动,当气动螺丝刀2与螺丝顶部接触后,控制第四驱动件2019开始工作,第四驱动件2019是电动推杆,第四驱动件2019带动压块2020向靠近气动螺丝刀2的启动开关移动,进而使得气动螺丝刀2开始工作,进而通过气动螺丝刀2对螺丝进行处理,在对螺丝进行处理的同时,第二驱动件209再次开始工作,通过第二驱动件209带动气动螺丝刀2缓慢移动回原位,使得螺丝能够顺利被气动螺丝刀2拧起,进一步,通过控制第一驱动件202开始工作,第一驱动件202是电动滑块,通过第一驱动件202带动第一连接板203沿着第一滑轨201移动,即带动气动螺丝刀2移动,使得气动螺丝刀2能够移动至需要处理螺丝的具体位置;
40.当气动螺丝刀2移动至有障碍物的位置时,为了防止气动螺丝刀2受到损害,当移动至有障碍物的位置后,障碍物先与第二l形板301接触,进而挤压第二l形板301,使得第二l形板301向远离障碍物移动,即通过第二l形板301带动安装板207向远离障碍物移动,即通过安装板207压缩第一弹性件204和第二连接板205,第一弹性件204和第二连接板205是弹簧伸缩板,进而使得气动螺丝刀2能够顺利通过障碍物,并且不会受到损害。
41.实施例2
42.在实施例1的基础上,如图1、图9-10所示,还包括有清洁组件,气动螺丝刀2下侧安装有清洁组件,清洁组件包括有第三l形板401、第四滑轨402、第五驱动件403、收集框404、环形块405、清理器406和限位板407;气动螺丝刀2外表面下侧固接有第三l形板401;第三l
形板401右侧内壁焊接有第四滑轨402;第四滑轨402内滑动连接有第五驱动件403;第五驱动件403左侧面焊接有收集框404;收集框404左侧焊接有环形块405;环形块405内侧设置有四个呈环形阵列的清理器406;环形块405下侧焊接有两个前后对称的限位板407。
43.环形块405对应于收集框404的位置开设有一个缺口。
44.四个清理器406均为软性材料,并且组合之后呈漏斗状。
45.在气动螺丝刀2对螺丝进行处理时,为了防止气动螺丝刀2拧螺丝的一端粘附有杂质,影响拧螺丝的效果,甚至导致滑丝,因此,为了避免这种情况的发生,当气动螺丝刀2在靠近螺丝顶部时,第五驱动件403同时开始工作,第五驱动件403是电动滑块,通过第五驱动件403带动收集框404向靠近气动螺丝刀2拧螺丝的一端移动,进而带动环形块405和四个清理器406移动,当气动螺丝刀2拧螺丝一端接触后,四个清理器406与气动螺丝刀2拧螺丝一端充分接触,并且发生形变,使得气动螺丝刀2拧螺丝一端能够顺利通过的同时,四个清理器406能够对其进行充分清理,并且清理下来的杂质自动从环形块405开设的缺口掉落到收集框404中,当气动螺丝刀2将螺丝拧起后,为了防止由于螺丝和气动螺丝刀2拧螺丝一端在磁力的作用下,被完全带起,并且掉落到地面,造成丢失,或者不方便工人后期的处理,当螺丝被拧起后,并且与两个限位板407接触后,两个限位板407使得螺丝自动与气动螺丝刀2拧螺丝一端分离,进而防止其被完全带出。
46.实施例3
47.在实施例2的基础上,如图1、图11-12所示,还包括有滑丝处理组件,第三l形板401右侧安装有滑丝处理组件,滑丝处理组件包括有第四l形板501、第二电动转轴502、传动轴503、第三弹性件504、第四连接板505和辅助器506;第三l形板401右侧面螺栓连接有第四l形板501;第三l形板401中部转动连接有传动轴503;第四l形板501前侧安装有第二电动转轴502;第二电动转轴502输出端固接传动轴503;传动轴503外表面固接有两个第三弹性件504;两个第三弹性件504上端面各固接有一个第四连接板505;两个第四连接板505之间安装有辅助器506。
48.辅助器506是具有形变能力的橡胶等材质。
49.当需要处理的螺丝顶部发生了滑丝的问题时,气动螺丝刀2无法顺利将其拧起,此时,控制第二电动转轴502开始工作,通过第二电动转轴502带动传动轴503转动,通过传动轴503带动两个第三弹性件504,第三弹性件504是弹簧伸缩板,通过两个第三弹性件504带动两个第四连接板505转动,进而通过两个第四连接板505带动辅助器506转动,使得辅助器506转动至气动螺丝刀2拧螺丝一端的正下方,然后在气动螺丝刀2拧螺丝一端与螺丝顶部接触之前,先与辅助器506接触,然后再使得辅助器506与螺丝顶部接触,并且使得辅助器506与螺丝顶部之间充分接触,并且产生一定压力,以此达到增大辅助器506与螺丝顶部的摩擦力,使得气动螺丝刀2在工作时,通过辅助器506将力传递到螺丝顶部,进而将螺丝顺利拧起。
50.本行业的技术人员应该了解,上述实施例不以任何形式限制本发明,凡采用等同替换或等效变换的方式所获得的技术方案,均落在本发明的保护范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。