1.本技术涉及掘进机器人技术领域,尤其涉及一种可远程操控的煤矿巷道智能掘进机器人。
背景技术:
2.隧道掘进技术是由早期的盾构(适用于软土层掘进的又称盾构)技术发展而来,是地下暗挖隧道的一种工程建设技术,是随着现代交通运输、地下工程、矿山开采、水利工程、市政建设以及电气通讯设施的发展而发展起来的。
3.如中国专利公开了:一种掘进式机器人控制电路,公开号:cn104615136a,本发明可以控制机器人各电机独立运动,对电流进行实时检测,提供了即时信息存储功能,可实现半自主式控制,提高了机器人的工作效率,稳定性和安全性,但是在进行掘进的时候,掘进头容易因为港道内壁过于坚硬,卡合在墙壁上,从而不能转动,影响到仪器的正常工作。
技术实现要素:
4.本发明的目的在于提供一种可远程操控的煤矿巷道智能掘进机器人,以解决上述背景技术中提出的问题。
5.本技术实施例采用下述技术方案:
6.一种可远程操控的煤矿巷道智能掘进机器人,包括仪器本体和掘进头,所述仪器本体上设置有履带,所述仪器本体上设置有操控掘进头掘进方向的操控机构,所述操控机构包括第一夹板,所述第一夹板固定安装在仪器本体的上表面,所述第一夹板之间设置有圆形转轴,该圆形转轴上活动套设有设备提升架,所述设备提升架的侧壁上固定安装有插杆,所述仪器本体的上表面固定安装有两组第二夹板,所述第二夹板之间活动安装有第一转轴,所述第一转轴上固定安装有第一气缸,所述第一气缸的输出轴固定安装有第一套环,所述插杆活动卡合在第一套环内。
7.优选的,所述设备提升架上设置有对控制掘进头伸缩的控制件;所述控制件包括安装板,所述安装板固定安装在设备提升架上,所述安装板上开设有圆形孔,所述安装板还开设有两个矩形槽,所述矩形槽和圆形孔相连通,且矩形槽设置在圆形孔的两侧,所述圆形孔内活动安装有发动机,所述发动机的输出端上固定安装有掘进头,所述发动机的侧壁上固定安装有两个侧边柱,每个所述侧边柱上均活动套设有第三套环,所述第三套环上固定安装有连接长杆,所述连接长杆上固定安装有第四套环,所述设备提升架和安装板的连接处设置有两个转柱,每个所述转柱外均固定安装有一个凸轮,两个所述凸轮以转柱中心产生的夹角为直角,每个所述凸轮上均固定安装有圆柱,所述圆柱活动卡合在第四套环内,所述凸轮的侧壁上固定安装有矩形板,所述矩形板内活动卡合安装有第二套环,所述第二套环内活动卡合安装有中心轴,所述设备提升架的侧壁上固定安装有第一连接块,所述第一连接块上固定安装有第二气缸,所述第二气缸的气缸推杆上固定安装有中心轴,所述转柱上开设有环形槽,所述环形槽内活动卡合有圆形长杆,所述圆形长杆活动卡合在设备提升
架内。
8.优选的,所述设备提升架上设置有辅助仪器掘进的辅助机构;所述辅助机构包括摆动杆,所述摆动杆固定安装在转柱上,所述摆动杆上固定安装有冲击板。
9.优选的,所述仪器本体上设置有辅助仪器行走的清理机构;所述清理机构包括第二连接块,所述第二连接块固定安装在仪器本体的侧壁上,所述第二连接块上上固定安装有铲板,所述铲板上开设有储存槽,所述铲板内设置有电机,电机的输出轴上固定安装有动力输出轴,所述动力输出轴外固定安装有第五套环,所述第五套环上固定安装有呈圆周分布的五组推动杆。
10.本技术实施例采用的上述至少一个技术方案能够达到以下有益效果:
11.其一,在使用时,启动仪器本体内的电机,带动履带转动,让仪器在煤矿巷道内移动,而移动到指定的位置后,启动第一气缸,第一气缸启动带第一气缸的气缸推杆进行移动,第一气缸的气缸推杆的移动带动第一套环的向上移动,第一套环的向上移动带动带动插杆向上移动,从而带动设备提升架的向上移动,插杆和第一转轴也跟着在第一套环和第二夹板内进行转动,来适应设备提升架的转动,通过第一气缸的启动,将掘进头对准需要进行开采的位置,通过启动发动机,发动机的启动带动掘进头的转动,实现对指定位置的掘进,本装置通过控制第一气缸的启动,实现对掘进头掘进方向的调节,从而方便仪器的对不同位置的开采。
12.其二,通过启动第二气缸,第二气缸的启动带动第二气缸的气缸推杆来回移动,从而带动中心轴在第二套环内进行转动,而第二气缸气缸推杆的来回移动也带动矩形板的向上移动,第二套环也跟着矩形板的移动在矩形板内进行转动,而矩形板的移动带动凸轮和转柱在安装板内进行转动,凸轮的向上移动带动圆柱的向上移动,圆柱的向上移动带动连接长杆的向上移动,连接长杆的向上移动带动推动第三套环向前移动,第三套环的向前移动带动侧边柱的向前移动,从而推动发动机和掘进头在圆形孔内向墙壁部分移动,侧边柱会在矩形槽内进行移动,而另一端的侧边柱在发动机向前移动的拉力作用下也向前移动,从而带动第三套环和凸轮之间趋于水平状态,而在圆形长杆限位的作用下,转柱转动的稳定性更高,防止转柱脱离轨迹,本装置通过第二气缸的启动,带动发动机的伸缩,这样在掘进头对煤矿巷道进行掘进的时候,掘进头不容易卡合在煤矿巷道内,减少掘进时,掘进头的损坏概率,从而提高仪器的使用效果。
13.其三,在第二气缸气缸推力的作用下,转柱会发生转动,而转柱的转动带动摆动杆的转动,而摆动杆的转动会带动冲击板上下移动,冲击板可以对地面进行敲击,让地面更加平整,而一端转柱的向下移动,让连接长杆和凸轮趋近水平,而另一端的连接长杆和凸轮趋近水平,会带动冲击板向上移动,这样两个冲击板会交错上下移动,实现对地面的敲击,本装置通过冲击板的上下移动,对地面进行敲击,防止地面上有凸起,影响到仪器的行走路径,且冲击板和履带处于同一水平位置,方便履带在地面上进行移动。
14.其四,通过启动铲板内的电机,带动动力输出轴的转动,动力输出轴的转动带动第五套环的转动,在仪器启动的时候,仪器的行走会带动铲板的移动,铲板的移动会将地面上多余的石块铲起,方便仪器的行走,而推动杆的转动会将石块勾起,让石块在储存槽上移动,而当仪器将要经过凹形的地面时,推动杆会将储存槽上的石块推下来,通过石块将凹坑填补起来,方便仪器的行走。
附图说明
15.此处所说明的附图用来提供对本技术的进一步理解,构成本技术的一部分,本技术的示意性实施例及其说明用于解释本技术,并不构成对本技术的不当限定。在附图中:
16.图1为本发明的正面结构示意图;
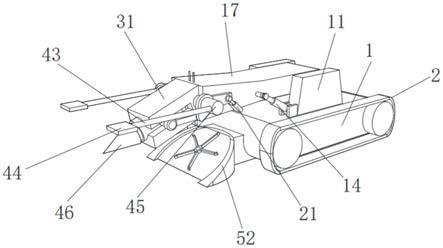
17.图2为本发明的俯视结构示意图;
18.图3为本发明操控机构的结构示意图;
19.图4为本发明清理机构的结构示意图;
20.图5为本发明控制件的结构示意图;
21.图6为本发明第二气缸的结构示意图;
22.图7为本发明控制件的分解结构示意图;
23.图8为本发明结构控制件的侧面示意图。
24.图中:1、仪器本体;2、履带;11、第一夹板;12、第二夹板;13、第一转轴;14、第一气缸;15、第一套环;16、插杆;17、设备提升架;21、第二气缸;22、第一连接块;23、中心轴;24、第二套环;25、矩形板;26、凸轮;27、圆柱;31、安装板;32、矩形槽;33、圆形孔;34、发动机;35、侧边柱;36、第三套环;37、连接长杆;38、第四套环;41、环形槽;42、圆形长杆;43、摆动杆;44、冲击板;45、转柱;46、掘进头;51、第二连接块;52、铲板;53、储存槽;54、动力输出轴;55、第五套环;56、推动杆。
具体实施方式
25.为使本技术的目的、技术方案和优点更加清楚,下面将结合本技术具体实施例及相应的附图对本技术技术方案进行清楚、完整地描述。显然,所描述的实施例仅是本技术一部分实施例,而不是全部的实施例。基于本技术中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本技术保护的范围。
26.以下结合附图,详细说明本技术各实施例提供的技术方案。
27.请参阅图1~图8,一种可远程操控的煤矿巷道智能掘进机器人,包括仪器本体1和掘进头46,仪器本体1上设置有履带2,仪器本体1上设置有操控掘进头46掘进方向的操控机构,操控机构包括第一夹板11,第一夹板11固定安装在仪器本体1的上表面,第一夹板11之间设置有圆形转轴,该圆形转轴上活动套设有设备提升架17,设备提升架17的侧壁上固定安装有插杆16,仪器本体1的上表面固定安装有两组第二夹板12,第二夹板12之间活动安装有第一转轴13,第一转轴13上固定安装有第一气缸14,第一气缸14的输出轴固定安装有第一套环15,插杆16活动卡合在第一套环15内。
28.在使用时,启动仪器本体1内的电机,带动履带2转动,让仪器在煤矿巷道内移动,而移动到指定的位置后,启动第一气缸14,第一气缸14启动带第一气缸14的气缸推杆进行移动,第一气缸14的气缸推杆的移动带动第一套环15的向上移动,第一套环15的向上移动带动带动插杆16向上移动,从而带动设备提升架17的向上移动,插杆16和第一转轴13也跟着在第一套环15和第二夹板12内进行转动,来适应设备提升架17的转动,通过第一气缸14的启动,将掘进头46对准需要进行开采的位置,通过启动发动机34,发动机34的启动带动掘进头46的转动,实现对指定位置的掘进,本装置通过控制第一气缸14的启动,实现对掘进头46掘进方向的调节,从而方便仪器的对不同位置的开采。
29.设备提升架17上设置有对控制掘进头46伸缩的控制件;控制件包括安装板31,安装板31固定安装在设备提升架17上,安装板31上开设有圆形孔33,安装板31还开设有两个矩形槽32,矩形槽32和圆形孔33相连通,且矩形槽32设置在圆形孔33的两侧,圆形孔33内活动安装有发动机34,发动机34的输出端上固定安装有掘进头46,发动机34的侧壁上固定安装有两个侧边柱35,每个侧边柱35上均活动套设有第三套环36,第三套环36上固定安装有连接长杆37,连接长杆37上固定安装有第四套环38,设备提升架17和安装板31的连接处设置有两个转柱45,每个转柱45外均固定安装有一个凸轮26,两个凸轮26以转柱45中心产生的夹角为直角,每个凸轮26上均固定安装有圆柱27,圆柱27活动卡合在第四套环38内,凸轮26的侧壁上固定安装有矩形板25,矩形板25内活动卡合安装有第二套环24,第二套环24内活动卡合安装有中心轴23,设备提升架17的侧壁上固定安装有第一连接块22,第一连接块22上固定安装有第二气缸21,第二气缸21的气缸推杆上固定安装有中心轴23,转柱45上开设有环形槽41,环形槽41内活动卡合有圆形长杆42,圆形长杆42活动卡合在设备提升架17内。
30.通过启动第二气缸21,第二气缸21的启动带动第二气缸21的气缸推杆来回移动,从而带动中心轴23在第二套环24内进行转动,而第二气缸21气缸推杆的来回移动也带动矩形板25的向上移动,第二套环24也跟着矩形板25的移动在矩形板25内进行转动,而矩形板25的移动带动凸轮26和转柱45在安装板31内进行转动,凸轮26的向上移动带动圆柱27的向上移动,圆柱27的向上移动带动连接长杆37的向上移动,连接长杆37的向上移动带动推动第三套环36向前移动,第三套环36的向前移动带动侧边柱35的向前移动,从而推动发动机34和掘进头46在圆形孔33内向墙壁部分移动,侧边柱35会在矩形槽32内进行移动,而另一端的侧边柱35在发动机34向前移动的拉力作用下也向前移动,从而带动第三套环36和凸轮26之间趋于水平状态,而在圆形长杆42限位的作用下,转柱45转动的稳定性更高,防止转柱45脱离轨迹,本装置通过第二气缸21的启动,带动发动机34的伸缩,这样在掘进头46对煤矿巷道进行掘进的时候,掘进头46不容易卡合在煤矿巷道内,减少掘进时,掘进头46的损坏概率,从而提高仪器的使用效果。
31.设备提升架17上设置有辅助仪器掘进的辅助机构;辅助机构包括摆动杆43,摆动杆43固定安装在转柱45上,摆动杆43上固定安装有冲击板44。
32.在第二气缸21气缸推力的作用下,转柱45会发生转动,而转柱45的转动带动摆动杆43的转动,而摆动杆43的转动会带动冲击板44上下移动,冲击板44可以对地面进行敲击,让地面更加平整,而一端转柱45的向下移动,让连接长杆37和凸轮26趋近水平,而另一端的连接长杆37和凸轮26趋近水平,会带动冲击板44向上移动,这样两个冲击板44会交错上下移动,实现对地面的敲击,本装置通过冲击板44的上下移动,对地面进行敲击,防止地面上有凸起,影响到仪器的行走路径,且冲击板44和履带2处于同一水平位置,方便履带2在地面上进行移动。
33.仪器本体1上设置有辅助仪器行走的清理机构;清理机构包括第二连接块51,第二连接块51固定安装在仪器本体1的侧壁上,第二连接块51上上固定安装有铲板52,铲板52上开设有储存槽53,铲板52内设置有电机,电机的输出轴上固定安装有动力输出轴54,动力输出轴54外固定安装有第五套环55,第五套环55上固定安装有呈圆周分布的五组推动杆56。
34.通过启动铲板52内的电机,带动动力输出轴54的转动,动力输出轴54的转动带动
第五套环55的转动,在仪器启动的时候,仪器的行走会带动铲板52的移动,铲板52的移动会将地面上多余的石块铲起,方便仪器的行走,而推动杆56的转动会将石块勾起,让石块在储存槽53上移动,而当仪器将要经过凹形的地面时,推动杆56会将储存槽53上的石块推下来,通过石块将凹坑填补起来,方便仪器的行走。
35.本领域内的技术人员应明白,本发明的实施例可提供为方法、系统、或计算机程序产品。因此,本发明可采用完全硬件实施例、完全软件实施例、或结合软件和硬件方面的实施例的形式。而且,本发明可采用在一个或多个其中包含有计算机可用程序代码的计算机可用存储介质(包括但不限于磁盘存储器、cd-rom、光学存储器等)上实施的计算机程序产品的形式。
36.还需要说明的是,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、商品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、商品或者设备所固有的要素。在没有更多限制的情况下,由语句“包括一个
……”
限定的要素,并不排除在包括所述要素的过程、方法、商品或者设备中还存在另外的相同要素。
37.以上所述仅为本技术的实施例而已,并不用于限制本技术。对于本领域技术人员来说,本技术可以有各种更改和变化。凡在本技术的精神和原理之内所作的任何修改、等同替换、改进等,均应包含在本技术的权利要求范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。