1.本发明涉及一种无人扫路机前置清扫装置及控制方法,属于环卫设备技术领域。
背景技术:
2.扫路机作为环卫设备之一,是一种集路面清扫、垃圾回收和运输为一体的新型高效清扫设备,可广泛应用于大型广场、停车场、人行辅道、城市住宅区、公园以及大型室内场所等区域清扫作业。扫路机可以清扫及收集垃圾,维护环境的卫生。
3.但对于一些狭窄区域,例如树间、巷道,无法进行有效清扫。随着无人驾驶扫路机的出现解放了驾驶员体力劳作,也提升了工作效率,但普遍存在扫盘定速清扫,作业参数匹配的不合理,清扫效果无法保证,不便于进行管理评估,制约扫路机的性能提升与发展。
技术实现要素:
4.本发明的目的在于克服现有技术中的不足,提供一种无人扫路机前置清扫装置及控制方法,适应狭窄区域工作,且提高清扫效果。
5.为达到上述目的,本发明所采用的技术方案是:提供一种无人扫路机前置清扫装置,包括前置清扫机构和控制机构,所述前置清扫机构包括:拉线、调宽油缸及与扫盘电气连接的扫刷电机,所述拉线的一端连接调宽油缸,另一端连接螺杆,所述螺杆的一端连接扫盘或扫刷电机,另一端铰接在扫路机上;所述控制机构包括整车控制器,及与整车控制器电气连接的无人驾驶系统、扫刷电机控制器和电磁阀组,所述电磁阀组与调宽油缸电气连接,还包括与控制机构电气连接的前部图像识别模块、后部图像识别模块和清洁度评估模块。
6.进一步的,所述前置清扫机构与扫盘之间设置弹簧,实现扫盘机械自动避障,起到冗余保护功能。
7.进一步的,所述电磁阀组上装有阻尼接头,用于调节调宽油缸的伸缩速度。
8.本发明还提供了一种无人扫路机前置清扫装置的控制方法,应用于上述任一项所述的一种无人扫路机前置清扫装置,包括,通过整车控制器进行切换的有人控制模式与无人控制模式,所述有人控制模式下,通过整车控制器控制扫刷电机控制器对扫刷电机进行调速;所述无人控制模式为:无人驾驶系统接收前部图像识别模块积累的路面污染图片,划分不同等级,并设定不同等级对应的扫盘转速和校准系数进行存储;无人驾驶系统接收前部图像识别模块采集的路面作业前图片,对比判断后向整车控制器输出扫盘目标转速信息;整车控制器控制扫刷电机控制器对扫刷电机调速,实现扫刷电机操控。
9.进一步的,整车控制器检测扫盘中的扫刷触地压力不足时,通过整车控制器预先设定参数自动调节扫盘摆宽角度,对触地压力闭环控制,达到最优清扫效果。
10.进一步的,所述无人驾驶系统接收前部图像识别模块及后部图像识别模块数据,上传至信息平台,方便对清扫效果进行远程评估。
11.进一步的,所述信息平台控制前部图像识别模块及后部图像识别模块的图片抓拍间隔。
12.进一步的,所述方法还包括清洁度评估模块获取前部图像识别模块与后部图像识别模块的数据,对比判定清洁度,并传输至无人驾驶系统,当清洁度小于设定值,所述无人驾驶系统对当前污染等级对应的校准系数进行校准。
13.与现有技术相比,本发明所达到的有益效果:前清扫装置设置拉线及调宽油缸,具有作业宽度调节功能,解决无法清扫树间、巷道等狭窄区域的问题;无人驾驶系统根据作业路况调节调宽油缸,实现电气自动避障,在前置清扫机构与扫盘之间设置弹簧5,实现扫盘自动避障,起到冗余保护;本发明提供的控制方法分为有人控制模式与无人控制模式,作业更加灵活,设置清洁度评估模块,根据前部图像识别模块8与后部图像识别模块9对比判定清洁度,无人驾驶系统6自动校准污染等级对应的校准系数,解决无人模式下作业参数匹配不合理、以及清扫效果不便于监管的问题。
附图说明
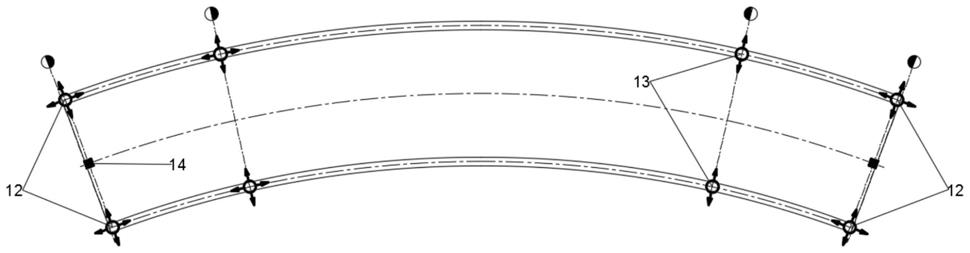
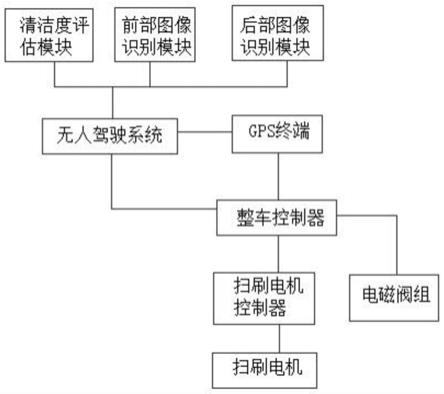
14.图1是本发明实施例提供的一种无人扫路机前置清扫装置的整体结构示意图;图2是本发明实施例提供的一种无人扫路机前置清扫装置系统示意图;图3是本发明实施例提供的一种无人扫路机前置清扫装置控制方法流程图;图中:1-扫刷电机;2-调宽油缸;3-拉线;4-螺杆;5-弹簧。
具体实施方式
15.下面结合附图对本发明作进一步描述。以下实施例仅用于更加清楚地说明本发明的技术方案,而不能以此来限制本发明的保护范围。
16.在本发明的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以通过具体情况理解上述术语在本发明中的具体含义。
17.如图1所示,为本发明实施例提供的一种无人扫路机前置清扫装置的整体结构示意图,包括:扫刷电机1、调宽油缸2、拉线3及螺杆4,所述拉线3的一端连接调宽油缸2,另一端连接螺杆4,所述螺杆4的一端连接扫盘或扫刷电机1,另一端铰接在扫路机上。
18.进一步的,前置清扫机构与扫盘之间可设置弹簧5,实现扫盘自动避障的功能。
19.如图2所示,为本发明实施例提供的一种无人扫路机前置清扫装置系统示意图,图3为本发明实施例提供的一种无人扫路机前置清扫装置控制方法流程图,包括gps终端、无人驾驶系统、整车控制器、扫刷电机控制器、扫刷电机、电磁阀组,其中无人驾驶系统包括采用电器连接的前部图像识别模块、后部图像识别模块及清洁度评估模块。无人驾驶系统能
够根据作业路况调节调宽油缸2,实现电气自动避障的功能。
20.扫刷电机1采用直流无刷电机与扫盘机械连接,通过扫刷电机控制器调节转速,使刷盘在0rpm-120rpm区间恒转速输出。
21.转速调节分为有人调节和无人调节两种控制模式,这两种模式通过开关切换。有人模式情况下:整车控制器采集电位计信号,通过can总线控制扫刷电机控制器对扫刷电机1调速。
22.无人模式下整车控制器接受无人驾驶系统需求转速信号,通过can总线控制扫刷电机控制器对扫刷电机1调速,实现扫刷电机转速无级调控,其中,有人模式适应性更强,并为无人模式下扫盘转速自适应控制提供基础。
23.调宽油缸2与拉线3机械连接,整车控制器控制电磁阀组中扫盘调宽与扫盘调窄电磁阀得电,使调宽油缸2伸缩,电磁阀组上装有阻尼接头,可调节伸缩速度,该设置的优点是作业过程清扫宽度任意可调,解决常规清扫装置无法清扫树间、巷道等狭窄区域的问题,作业更加灵活。本实施例设置调宽油缸2调节全行程运行时间为3s。
24.电磁阀组内设置有压力传感器,用于检测扫盘触地压力,当扫刷磨损后,触地压力不足,通过整车控制器进行参数设置,自动调节扫刷摆宽角度,对触地压力闭环控制,达到最优清扫效果,较常规人为通过螺栓机械限宽的方法,操作更加便捷,省时省力。
25.其扫盘和扫路机之间增加弹簧5,其作用是扫盘外侧受力可自动弹回,无外力情况下受弹簧拉力自动摆出,实现自动避障的功能。
26.如图3所示,为本发明实施例提供的一种无人扫路机前置清扫装置控制方法流程图,无人驾驶系统不断积累路面污染度数据,进行数据的分类与标定,划分为10个污染度等级,通过大量测试,确定每个污染度等级对应的扫盘转速初定例如v1、v2
…
v10,并设置一个校准系数,例如s1、s2
…
s10,系数初始值例如0.85,目的是使校准系数达到一定负偏离。
27.车身前部安装前部图像识别模块,用于采集路面清扫作业之前的信息,通过与数据库的图片对比,判断污染度,无人驾驶系统将扫盘目标转速,通过can发送至整车控制器调节扫盘转速。
28.安装在车身后部的后部图像识别模块,用于采集路面清扫作业之后的信息,无人驾驶系统将作业前后图像通过gps终端上传至信息平台,其图像抓拍间隔信息平台可设,本实施例设定图像抓拍间隔为1分钟,实现远程评估清扫效果,便于管理。
29.清洁度评估模块根据前部图像识别模块与后部图像识别模块数据对比,计算清洁度,得出0-100区间数值,当清洁度数值小于一定值时例如95,无人驾驶系统自学习,自动校准当前污染度数值下对应的校准系数,逐步使各个污染度下的校准系数达到最佳匹配值。解决无人模式下作业参数匹配不合理影响清扫效果的问题。
30.以上所述仅是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明技术原理的前提下,还可以做出若干改进和变形,这些改进和变形也应视为本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。