技术特征:
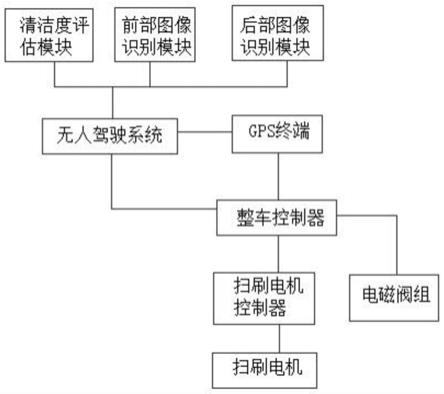
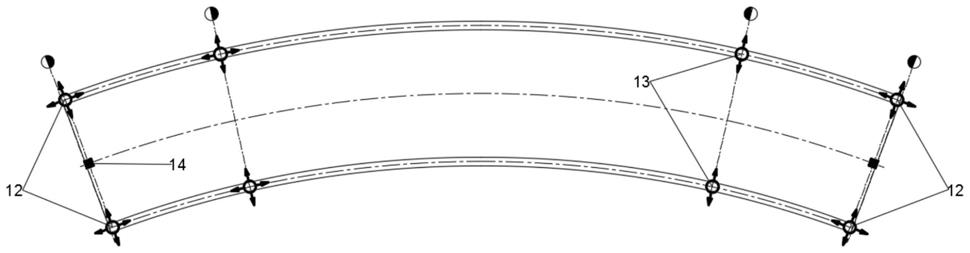
1.一种无人扫路机前置清扫装置,其特征在于,包括前置清扫机构和控制机构,所述前置清扫机构包括:拉线、调宽油缸及与扫盘电气连接的扫刷电机,所述拉线的一端连接调宽油缸,另一端连接螺杆,所述螺杆的一端连接扫盘或扫刷电机,另一端铰接在扫路机上;所述控制机构包括整车控制器,及与整车控制器电气连接的无人驾驶系统、扫刷电机控制器和电磁阀组,所述电磁阀组与调宽油缸电气连接,还包括与控制机构电气连接的前部图像识别模块、后部图像识别模块和清洁度评估模块。2.根据权利要求1所述的一种无人扫路机前置清扫装置,其特征在于,所述前置清扫机构与扫盘之间设置弹簧。3.根据权利要求1所述的一种无人扫路机前置清扫装置,其特征在于,所述电磁阀组上装有阻尼接头,用于调节调宽油缸的伸缩速度。4.一种无人扫路机前置清扫装置的控制方法,应用于权利要求1-3任一项所述的一种无人扫路机前置清扫装置,包括,通过整车控制器进行切换的有人控制模式与无人控制模式,所述有人控制模式下,通过整车控制器控制扫刷电机控制器对扫刷电机进行调速;所述无人控制模式为:无人驾驶系统接收前部图像识别模块积累的路面污染图片,划分不同等级,并设定不同等级对应的扫盘转速和校准系数进行存储;无人驾驶系统接收前部图像识别模块采集的路面作业前图片,对比判断后向整车控制器输出扫盘目标转速信息;整车控制器控制扫刷电机控制器对扫刷电机调速,实现扫刷电机操控。5.根据权利要求4所述的一种无人扫路机前置清扫装置的控制方法,其特征在于,整车控制器检测扫盘中的扫刷触地压力不足时,通过整车控制器预先设定参数自动调节扫盘摆宽角度。6.根据权利要求4所述的一种无人扫路机前置清扫装置的控制方法,其特征在于,所述无人驾驶系统接收前部图像识别模块及后部图像识别模块数据,上传至信息平台。7.根据权利要求6所述的一种无人扫路机前置清扫装置的控制方法,其特征在于,所述信息平台控制前部图像识别模块及后部图像识别模块的图片抓拍间隔。8.根据权利要求4所述的一种无人扫路机前置清扫装置的控制方法,其特征在于,所述方法还包括清洁度评估模块获取前部图像识别模块与后部图像识别模块的数据,对比判定清洁度,并传输至无人驾驶系统,当清洁度小于设定值,所述无人驾驶系统对当前污染等级对应的校准系数进行校准。
技术总结
本发明公开了一种无人扫路机前置清扫装置,包括前置清扫机构和控制机构,其中前置清扫机构包括拉线、调宽油缸及与扫盘电气连接的扫刷电机,拉线一端连接调宽油缸,另一端连接螺杆,螺杆一端连接扫盘或扫刷电机,另一端铰接在扫路机上;控制机构包括整车控制器,及与整车控制器电气连接的无人驾驶系统、扫刷电机控制器和电磁阀组,电磁阀组与调宽油缸电气连接,无人驾驶系统设置与控制机构电气连接的前、后部图像识别模块和清洁度评估模块。本发明还提供了一种无人扫路机前置清扫装置的控制方法,分为有人与无人两种控制模式,作业灵活,方便狭窄区域工作,解决无人模式下无法自动避障、作业参数匹配不合理及清扫效果不便监管的问题。管的问题。管的问题。
技术研发人员:程磊 刁鑫 单龙 孙进 许海川
受保护的技术使用者:徐州徐工环境技术有限公司
技术研发日:2021.12.20
技术公布日:2022/3/15
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。