1.本技术属于炒菜设备技术领域,更具体地说,是涉及一种炒菜机。
背景技术:
2.传统的炒菜机:有滚筒搅拌式,有行星搅拌式,有竖直搅拌式,有封闭搅拌式等。不实用、水汽重、无锅气、价格昂贵、故障率高、占地面积大、炒菜不稳定、很多菜不能炒等各种缺陷导致这些类型炒菜机均没有得到市场大规模应用。
3.随着人力成本和标准化的要求越来越高,市场迫切需求一种实用低成本的炒菜机来解决实际应用的问题,且传统的炒菜机为了实现炒菜功能,各个功能结构均复杂,传动多,且炒菜效果不佳。
技术实现要素:
4.本技术实施例的目的在于提供一种炒菜机,以解决现有技术中炒菜机成本高的技术问题。
5.为实现上述目的,本技术采用的技术方案是:提供一种炒菜机,包括:机柜、控制系统、锅模块、搅拌模块、喷料模块、投料模块和触摸显示器,所述机柜的顶部包括具有高度差的第一平台和第二平台,所述锅模块转动设置所述第二平台的侧壁上且位于所述第一平台的上方,所述搅拌模块设置在所述锅模块内并用于炒菜,所述喷料模块设置在所述机柜内部且所述喷料模块的喷料头位于所述第二平台上,所述投料模块设置在所述第二平台上,所述触摸显示器设置在所述第二平台的正面上,所述控制系统设置在所述机柜内部且与所述锅模块、搅拌模块、喷料模块、投料模块和触摸显示器电连接;所述锅模块包括:锅外罩、锅体和锅驱动电机,所述锅体设置在所述锅外罩内,所述锅外罩的外侧壁上设有旋转柄,所述旋转柄与所述锅驱动电机传动连接,锅体的外侧壁上设有异形感应发热线盘,所述锅体的开口侧边最高点与所述锅体的轴线之间的连线与轴线之间的夹角度数在40
°‑
90
°
之间。
6.在一个实施方式中,所述异形感应发热线盘与所述锅外罩之间设有隔热棉,所述锅外罩的底部设有散热盘,所述锅外罩的顶部侧壁设有散热孔,所述锅外罩的侧壁设有散热风机。
7.在一个实施方式中,所述锅体倾斜设置,所述锅体的开口端上侧设有缺口,所述缺口处设有圆弧挡边。
8.在一个实施方式中,所述搅拌模块包括:旋转组件和搅拌叶组件,所述旋转组件设置在所述锅体的底部外侧,所述搅拌叶组件设置在所述锅体内,所述旋转组件和所述搅拌叶组件传动连接。
9.在一个实施方式中,所述旋转组件包括旋转主支撑座、旋转主轴、驱动所述旋转主轴转动的驱动件以及检测旋转状态的旋转传感器,所述旋转主轴转动设置在所述旋转主支撑座上且一端伸入至所述锅体内,另一端与所述驱动件传动连接。
10.在一个实施方式中,所述驱动件包括旋转支座、旋转电机、旋转主动轮和旋转从动
轮,所述旋转电机设置在旋转支座上,所述旋转主动轮设置在所述旋转电机上,所述旋转从动轮设置在所述旋转主轴上,所述旋转主动轮和旋转从动轮通过旋转皮带传动连接,或者所述旋转主动轮和旋转从动轮啮合传动连接。
11.在一个实施方式中,所述搅拌模块还包括上下弹性组件,所述上下弹性组件包括:弹性支座、伸缩轴、第一复位弹簧、弹性驱动电机、偏心轮和弹性传感器;所述弹性驱动电机设置在所述弹性支座上,所述偏心轮设置在所述弹性驱动电机的输出轴上,所述伸缩轴活动式设于所述旋转主轴内,所述第一复位弹簧套设在所述伸缩轴上并位于所述旋转主轴内,所述弹性传感器设于所述弹性支座上并感应所述伸缩轴的伸缩状态,所述搅拌叶组件设置在所述伸缩轴的一端,所述伸缩轴的另一端与所述偏心轮抵接。
12.在一个实施方式中,所述搅拌叶组件包括:连接杆、搅拌连接架、搅拌片和打散柱,所述连接杆的一端与所述旋转组件连接,另一端与所述搅拌连接架连接,所述搅拌片设置在所述搅拌连接架上,所述打散柱间隔设置有若干且设置在所述搅拌连接架上。
13.在一个实施方式中,所述连接杆和所述旋转组件铰接,铰接处套设有第二复位弹簧;或者,所述搅拌连接架上设有弹性连接片,所述搅拌片设置在所述弹性连接片。
14.在一个实施方式中,所述投料模块包括:托盘、料盒、夹爪、夹紧电机、投料电机、投料传感器、往复运动电机和平移传感器;所述托盘滑动设置在所述第二平台上,所述料盒设置有多个且放置在所述托盘上,所述投料电机设置在所述第二平台上,所述夹紧电机设置在所述投料电机的输出轴上,所述夹爪设置在所述夹紧电机上并用于夹持所述料盒,所述投料传感器设置在所述第二平台上并感应所述投料电机的投料状态;所述夹紧电机上设有用于感应所述夹爪夹持状态的夹紧状态传感器;所述投料电机上设有与所述夹爪配合夹紧所述料盒的限位凸台;所述喷料模块包括:设置在机柜内的液体箱瓶、吸料泵、流量控制器和正反向吸料泵,所述吸料泵与所述液体箱瓶的数量相同,所述流量控制器设置在所述吸料泵和所述液体箱瓶之间,所述正反吸料泵与所述吸料泵和所述喷料头连接。
15.本技术提供的炒菜机的有益效果在于:将搅拌模块设置在锅模块内,能保证搅拌效果,且有利于投料模块和喷料模块进行加料,简化炒菜步骤,降低传动成本;锅模块倾斜设置,开口倾斜朝向,这样可有效避免水汽重、油烟排放不便的问题且由于锅外罩的外侧壁上设有旋转柄,旋转柄与锅驱动电机传动连接,这样方便实现倒菜和倒水等动作,降低人工操作成本;锅体的外侧壁上设有异形感应发热线盘,保证锅体受热范围,使得菜在翻转过程中菜充分受热,保证炒菜效果;锅体的开口侧边最高点与锅体的轴线之间的连线与轴线之间的夹角度数在40
°‑
90
°
之间,这样搅拌模块在搅拌过程中,不会使得菜会被翻出锅体,防止菜溅射到锅体外,保证炒菜机的干净整洁性。
附图说明
16.为了更清楚地说明本技术实施例中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本技术的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
17.图1为本技术实施例提供的炒菜机的正视立体结构示意图;
18.图2为本技术实施例提供的炒菜机中机柜省略侧盖后的立体结构示意图;
19.图3为本技术实施例提供的炒菜机中机柜省略前门后的立体结构示意图;
20.图4为本技术实施例提供的炒菜机的后视立体结构示意图;
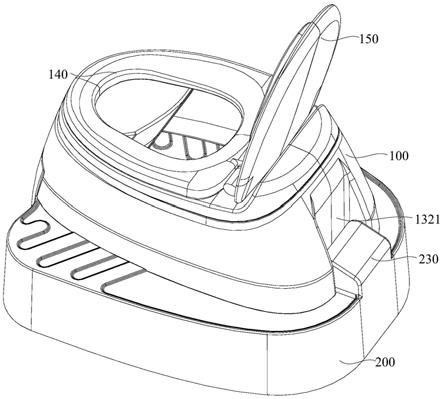
21.图5为本技术实施例提供的炒菜机中锅模块的立体结构示意图;
22.图6为本技术实施例提供的炒菜机中锅模块的内部立体结构示意图;
23.图7为本技术实施例提供的炒菜机中锅模块的异形感应发热线盘的立体结构示意图;
24.图8为本技术实施例提供的炒菜机中锅模块的锅体与旋转组件、上下弹性组件的立体结构关系示意图;
25.图9为本技术实施例提供的炒菜机中锅模块的旋转组件、上下弹性组件的剖视结构示意图;
26.图10为本技术实施例提供的炒菜机中锅模块的第一种搅拌叶组件的立体结构示意图;
27.图11为本技术实施例提供的炒菜机中投料模块的立体结构示意图;
28.图12为本技术实施例提供的炒菜机中投料模块的斜仰视立体结构示意图;
29.图13为本技术实施例提供的炒菜机中投料模块夹持料盒的状态结构示意图;
30.图14为本技术实施例提供的炒菜机中旋转组件和搅拌叶组件的第二种立体结构示意图;
31.图15为本技术实施例提供的炒菜机中锅体的另一种立体结构示意图;
32.图16为本技术实施例提供的炒菜机中旋转组件和搅拌叶组件的第三种立体结构示意图;
33.图17为本技术实施例提供的炒菜机中异形感应发热线盘的第二种结构示意图。
34.其中,图中各附图标记:
35.1、机柜;11、第一平台;12、第二平台;13、刮菜器;14、放碗盆槽;15、支撑脚;16、排水口;17、电源输入口;18、前门;19、喇叭;2、控制系统;21、主控制器;22、电源控制器;23、加热控制器;24、功率控制器;25、进水控制器;3、锅模块;31、锅外罩;311、脚垫;32、锅体;321、缺口;322、圆弧挡边;33、锅驱动电机;34、旋转柄;35、异形感应发热线盘;36、隔热棉;37、散热盘;38、散热孔;39、散热风机;4、搅拌模块;41、旋转组件;411、旋转主支撑座;412、旋转主轴;413、驱动件;4131、旋转支座;4132、旋转电机;4133、旋转主动轮;4134、旋转从动轮;4135、旋转皮带;414、旋转传感器;42、搅拌叶组件;421、连接杆;422、搅拌连接架;423、搅拌片;4231、锅底搅拌叶片;4232、锅沿搅拌叶片;424、打散柱;425、第二复位弹簧;426、弹性连接片;43、上下弹性组件;431、弹性支座;432、伸缩轴;433、第一复位弹簧;434、弹性驱动电机;435、偏心轮;436、弹性传感器;437、往复齿轮;438、齿条;5、喷料模块;51、喷料头;52、液体箱瓶;53、吸料泵;54、流量控制器;55、正反向吸料泵;6、投料模块;61、托盘;611、齿板;62、料盒;63、夹爪;64、夹紧电机;641、夹紧状态传感器;65、投料电机;66、投料传感器;67、往复运动电机;671、主平移齿轮;672、从平移齿轮;68、平移传感器;69、限位凸台;7、触摸显示器。
具体实施方式
36.为了使本技术所要解决的技术问题、技术方案及有益效果更加清楚明白,以下结
合附图及实施例,对本技术进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本技术,并不用于限定本技术。
37.需要说明的是,当元件被称为“固定于”或“设置于”另一个元件,它可以直接在另一个元件上或者间接在该另一个元件上。当一个元件被称为是“连接于”另一个元件,它可以是直接连接到另一个元件或间接连接至该另一个元件上。
38.需要理解的是,术语“长度”、“宽度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本技术和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本技术的限制。
39.此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括一个或者更多个该特征。在本技术的描述中,“多个”的含义是两个或两个以上,除非另有明确具体的限定。
40.如图1-图4所示,现对本技术实施例提供的一种炒菜机进行说明。该炒菜机,包括:机柜1、控制系统2、锅模块3、搅拌模块4、喷料模块5、投料模块6和触摸显示器7。机柜1为承载主体,用于将各模块集成在一起。控制系统2用于控制炒菜工作的整个自动化流程;锅模块3用于炒菜的主体,搅拌模块4用于将菜原料进行搅拌,实现炒菜动作;喷料模块5用于将醋、料酒等液体配料喷入到锅模块3内进行调味;投料模块6用于将菜原料投入到锅模块3内;触摸显示器7用于设置炒菜程序,比如实现录入各种炒菜程序,实际炒菜时选择相对应的菜名即可进行自动化炒菜。
41.在本实施例中,如图1-图4所示,机柜1的顶部包括具有高度差的第一平台11和第二平台12,第一平台11低于第二平台12,第一平台11和第二平台12呈l型,锅模块3转动设置第二平台12的侧壁上且位于第一平台11的上方,搅拌模块4设置在锅模块3内并用于炒菜,喷料模块5设置在机柜1内部且喷料模块5的喷料头51位于第二平台12上,这样喷料头51的位置高于锅模块3的位置,方便将配料喷入到锅模块3内;投料模块6设置在第二平台12上,投料模块6的位置高于锅模块3的位置,方便将菜原料投入到锅模块3内;触摸显示器7设置在第二平台12的正面上,这样方便工作人员进行操作。控制系统2设置在机柜1内部且与锅模块3、搅拌模块4、喷料模块5、投料模块6和触摸显示器7电连接;控制系统2用于实现自动化炒菜,使得各模块相互配合。控制系统2可以采用现有的单片机控制系统。
42.在本实施例中,如图5-图8所示,锅模块3包括:锅外罩31、锅体32和锅驱动电机33。锅体32设置在锅外罩31内,锅外罩31用于起保护作用;锅外罩31的外侧壁上设有旋转柄34,锅驱动电机33设置在第二平台12的内部,旋转柄34与锅驱动电机33传动连接,锅驱动电机33用于驱动锅体32进行旋转,以便进行倒菜和倒水等动作,实现自动下菜和倒清洗水;锅体32的外侧壁上设有异形感应发热线盘35,异形感应发热线盘35是用于对锅体32进行加热,异形感应发热线盘35根据锅体32的具体形状进行设计,在本实施例中,锅体32为倾斜设置的筒状结构,异形感应发热线盘35的底部设置呈三角形,且密度向四周逐渐变疏,这样可以将异形感应发热线盘35延伸至锅体32的较高位置,保证锅体32内的受热面积,使得菜在较高位置时也能受热,同时底部温度较高,可以保证炒菜效率。
43.在本实施例中,锅体32的开口侧边最高点(附图中的a点位置)与锅体32的轴线之
间的连线与轴线之间的夹角度数在40
°‑
90
°
之间,这样搅拌模块4在搅拌过程中,不会使得菜会被翻出锅体32,防止菜溅射到锅体32外,保证炒菜机的干净整洁性;同时锅体32的开口朝上倾斜,这样方便热气散出,有效避免水汽重、油烟排放不便的问题。
44.在本实施例中,将搅拌模块4设置在锅模块3内,能保证搅拌效果,且有利于投料模块6和喷料模块5进行加料,简化炒菜步骤,降低传动成本;锅模块3倾斜设置,开口倾斜朝向,这样可有效避免水汽重、油烟排放不便的问题且由于锅外罩31的外侧壁上设有旋转柄34,旋转柄34与锅驱动电机33传动连接,这样方便实现倒菜和倒水等动作,降低人工操作成本;锅体32的外侧壁上设有异形感应发热线盘35,保证锅体32受热范围,使得菜在翻转过程中菜充分受热,保证炒菜效果;锅体32的开口侧边最高点与锅体32的轴线之间的连线与轴线之间的夹角度数在40
°‑
90
°
之间,这样搅拌模块4在搅拌过程中,不会使得菜会被翻出锅体32,防止菜溅射到锅体32外,保证炒菜机的干净整洁性。
45.在本实施例中,锅体32为纯铁锅,无涂层,搅拌模块4在锅体32内进行搅拌时能实现菜在空中翻腾,模拟人工颠勺炒菜动作,保证炒菜受热效果。
46.在本实施例中,异形感应发热线盘35与锅外罩31之间设有隔热棉36,隔热棉36是防止热量散失,同时也避免锅外罩31温度过高。锅外罩31的底部设有散热盘37,锅外罩31的顶部侧壁设有散热孔38,锅外罩31的侧壁设有散热风机39,散热盘37、散热孔38和散热风机39均是用于降温。锅外罩31的底部设置若干脚垫311,在锅体32不转动时,脚垫311支撑在第一平台11上,这样保证锅体32在炒菜时的稳定性,对旋转柄34和锅驱动电机33具有一定的保护作用。
47.在本实施例中,锅体32倾斜设置,锅体32的开口端上侧设有缺口321,缺口321处设有圆弧挡边322,圆弧挡边322的作用是用于下文的搅拌叶旋转控制导向,不回弹,锅体32的一侧沿高出另一侧,用于控制炒菜翻菜时不出锅。缺口321的设计也有利于热气散出。
48.在本实施例中,如图5、图6、图8、图9和图10所示,搅拌模块4包括:旋转组件41和搅拌叶组件42,旋转组件41设置在锅体32的底部外侧,搅拌叶组件42设置在锅体32内,旋转组件41和搅拌叶组件42传动连接。锅体32的底部和锅外罩31的底部之间具有间距,该间距可以用于安装旋转组件41。旋转组件41用于驱动搅拌叶组件42进行转动,以便搅拌叶组件42对锅体32的菜进行翻炒。
49.在本实施例中,旋转组件41包括旋转主支撑座411、旋转主轴412、驱动旋转主轴412转动的驱动件413以及检测旋转状态的旋转传感器414,旋转主轴412转动设置在旋转主支撑座411上且一端伸入至锅体32内,另一端与驱动件413传动连接。旋转主支撑座411主要起定位安装作用,旋转主轴412用于实现搅拌叶组件42和驱动件413的传动连接,旋转传感器414用于监控旋转主轴412的转动状态,以便控制搅拌叶组件42的炒菜状态。
50.在本实施例中,驱动件413包括旋转支座4131、旋转电机4132、旋转主动轮4133和旋转从动轮4134。其中,旋转支座4131安装在锅体32上,旋转电机4132设置在旋转支座4131上,旋转主动轮4133设置在旋转电机4132的输出轴上,旋转从动轮4134设置在旋转主轴412上。在第一种实施方式中,如图8和图16所示,旋转主动轮4133和旋转从动轮4134通过旋转皮带4135传动连接,旋转主动轮4133和旋转从动轮4134优选为同步轮,旋转皮带4135优选为同步带。在第二种实施方式中,如图14所示,旋转主动轮4133和旋转从动轮4134啮合传动连接,旋转主动轮4133和旋转从动轮4134优选为锥齿轮。
51.如图6、图8和图9所示,在本实施例的一个实施方式中,搅拌模块4还包括上下弹性组件43,上下弹性组件43用于实现搅拌叶组件42沿锅体32轴线方向往复运动。具体地,上下弹性组件43包括:弹性支座431、伸缩轴432、第一复位弹簧433、弹性驱动电机434、偏心轮435和弹性传感器436。弹性支座431设置在锅体32上,弹性驱动电机434设置在弹性支座431上,偏心轮435设置在弹性驱动电机434的输出轴上,伸缩轴432活动式设于旋转主轴412内,第一复位弹簧433套设在伸缩轴432上并位于旋转主轴412内,弹性传感器436设于弹性支座431上并感应伸缩轴432的伸缩状态,搅拌叶组件42设置在伸缩轴432的一端,伸缩轴432的另一端与偏心轮435抵接。当弹性驱动电机434工作时,带动偏心轮435转动,偏心轮435驱动伸缩轴432伸出主轴并带动搅拌叶组件42伸出,偏心轮435继续转动,在第一复位弹簧433的弹力作用下,伸缩轴432收缩,带动搅拌叶组件42回缩,从而实现搅拌叶组件42沿锅体32轴线方向上下往复运动,保证搅拌叶组件42能充分的对锅体32内的菜进行翻炒。
52.具体地,在伸缩轴432远离偏心轮435的一端内设有齿条438,搅拌叶组件42与伸缩轴432的连接处设有与齿条438啮合的往复齿轮437,往复齿轮437转动设置,这样是为了保证搅拌叶组件42的上下往复运动。伸缩轴432与偏心轮435抵接的一端设置成半球状,这样方便伸缩轴432随主轴同步转动时还可以进行上下伸缩动作。在实际工作过程中,搅拌叶组件42转动和上下运动同步进行,这样有效保证了炒菜效果。
53.在本实施例的一个实施方式中,搅拌叶组件42包括:连接杆421、搅拌连接架422、搅拌片423和打散柱424。其中,连接杆421的一端与旋转组件41连接,另一端与搅拌连接架422连接,搅拌片423设置在搅拌连接架422上,打散柱424间隔设置有若干且设置在搅拌连接架422上。
54.其中,连接杆421与旋转主轴412连接,或者连接杆421与伸缩轴432连接。如图10所示,连接杆421与伸缩轴432连接时,连接杆421的一端设有u型口,利用销轴或螺钉等可以将连接杆421与伸缩轴432连接在一起。当连接杆421与旋转主轴412连接时,连接杆421可以与旋转主轴412焊接或通过孔和键的方式传动连接在一起。
55.当锅体32为筒体结构且一端开口时,如图5和图10所示,搅拌片423包括锅底搅拌叶片4231和锅沿搅拌叶片4232,这样可以充分、全方位的对锅体32内的菜进行翻炒。
56.当锅体32为筒体结构且侧壁开口时,如图15和图16所示,连接杆421设置有两根,且连接杆421的中间位置分别转动设置在锅体32内,其中一根连接杆421与旋转主轴412传动连接,搅拌连接架422设置有两根且分别与两根连接杆421的一端连接,搅拌片423设置有四个,每个搅拌连接架422上设有两个搅拌片423,两个搅拌片423之间具有钝角。这样旋转主动带动搅拌叶组件42转动时,可以带动菜进行腾空翻转,模拟出人工颠勺动作。在该结构中,如图17所示,异形感应发热线盘35的截面为圆弧,疏密程度不一,具体为左侧疏,右侧密,中间密,上下疏,四角疏,内侧密,这样保证炒菜效果。
57.在本实施例的一种优选方案中,连接杆421和旋转组件41铰接,具体地,连接杆421与旋转主轴412铰接,如图14所示,旋转主轴412上设有支杆,支杆与连接杆421铰接且呈钝角设置,第二复位弹簧425套设在连接杆421和支杆上并包裹铰接点,第二复位弹簧425为了保持直线状态,第二复位弹簧425可以使得搅拌片423始终抵接锅体32的侧壁进行炒菜。在本实施例的第二种优选方案中,如图16所示,搅拌连接架422上设有弹性连接片426,搅拌片423设置在弹性连接片426,利用弹性连接片426可以保证搅拌片423始终与锅体32内壁接
触,保证炒菜效果,同时降低了锅体32内的结构,方便锅体32进行清洗,弹性连接片426为耐高温的高分子材料,如食品级耐高温硅胶片。
58.如图11-图13所示,投料模块6包括:托盘61、料盒62、夹爪63、夹紧电机64、投料电机65、投料传感器66、往复运动电机67和平移传感器68。其中,托盘61滑动设置在第二平台12上,料盒62设置有多个且放置在托盘61上,投料电机65设置在第二平台12上,夹紧电机64设置在投料电机65的输出轴上,夹爪63设置在夹紧电机64上并用于夹持料盒62,投料传感器66设置在第二平台12上并感应投料电机65的投料状态;夹紧电机64上设有用于感应夹爪63夹持状态的夹紧状态传感器641;当需要投料时,夹紧电机64驱动夹爪63夹持料盒62,此时夹紧状态传感器641感应到料盒62被夹爪63夹紧,投料电机65驱动夹紧电机64转动,使得料盒62翻转,开口朝下,将内部的菜原料投入到锅体32内,此时投料传感器66感应到料盒62处于投料状态。具体地,投料模块6还包括主平移齿轮671和从平移齿轮672,在托盘61的底部设有齿板611,往复运动电机67设置在第二平台12上,主平移齿轮671设置在往复运动电机67的输出轴上并与齿板611啮合,从平移齿轮672设置在齿板611的另一侧且与其啮合,主平移齿轮671和从平移齿轮672位于齿板611的两侧,这样保证托盘61往复运动的稳定性,平移传感器68用于检测托盘61的平移位置,以便夹爪63对不同的料盒62进行夹取。托盘61可以沿直线往复运动,可以对不同位置的料盒62进行夹持投料,而且采用往复运动电机67直接进行直线驱动的方式,无中间传动环节,结构简单,可靠;两个齿轮夹持齿板611的夹紧方式非常可靠,对实际料盒62摆放偏移里容许量大。对料盒62形状要求简单,兼容性强,利于实际产品应用。
59.具体地,投料电机65上设有配合夹爪63夹紧料盒62的限位凸台69,料盒62的开口端设置凸边,凸边与料盒62的侧壁之间具有内角,该内角可以抵接在限位凸台69上,以便夹爪63能稳定的夹持料盒62。而且一般的料盒62均有凸边,可以提供料盒62的普遍适用性。
60.如图3所示,喷料模块5包括:设置在机柜1内的液体箱瓶52、吸料泵53、流量控制器54和正反向吸料泵55,吸料泵53与液体箱瓶52的数量相同,流量控制器54设置在吸料泵53和液体箱瓶52之间,正反吸料泵55与吸料泵53和喷料头51连接。液体箱瓶52设置有多个,每个液体箱瓶52用来装不同的配料,配料包括但不限于白醋、陈醋、酱油、生抽、料酒等液体配料;喷料头51的数量与液体箱瓶52的数量相同。
61.如图2所示,控制系统2至少包括主控制器21、电源控制器22、加热控制器23、功率控制器24和进水控制器25,以便实现炒菜功能的自动化控制。
62.在本实施例中,如图1和图3所示,机柜1上铰接有前门18,前门18可以打开,这样方便更换液体箱瓶52。在第一平台11上设有放碗盆槽14,用于放置碗盆接收炒好的菜,同时也用于接收清洗水,如图4所示,在机柜1的后侧设有排水口16,排水口16与放碗盆槽14连通,用于将清洗水排出。在机柜1的后侧还设有电源输入口17,用于实现该炒菜机的电连接。在第二平台12的侧壁上可拆卸式设有刮菜器13,供用户拿取将锅体32内菜刮出至碗盆内。在机体的前侧还设有喇叭19,喇叭19用于实现语音播报,可以提醒用户炒菜是否完成等提示。在机柜1的底部设置支撑脚15,支撑脚15可以采用橡胶或塑胶等防滑材料制成,避免造成用户地面损坏。
63.以上所述仅为本技术的较佳实施例而已,并不用以限制本技术,凡在本技术的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本技术的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。