1.本发明涉及轮椅领域,尤其涉及一种适用于轻障人群的轮椅,更具体是电动轮椅和其控制方法。
背景技术:
2.中国正在逐渐进入老龄化社会。第七次人口普查数据表明,中国60岁及以上人口为26402万人,占18.70%;其中,65岁及以上人口为19064万人,占13.50%。提高老年人生活质量、关爱老年人成为社会的重要课题。老年人随着年龄的增长,有相当数量的老年人腿脚不便,影响正常外出活动。因此,为老年人提供一种低成本、易操作且走行平稳的代步工具,是落实关爱老年人政策的重要一环。另外,我国目前存在肢体残疾人士2472万人。除了老年人以外,下肢残疾的残疾人或暂时行动不便的患者也具有同样的需求。
3.轮椅是一种重要的助残用具,也是腿脚不便的老年人的理想的代步工具。然而,普通的轮椅,一般需要靠乘坐者自身的上肢力量来驱动,或者由旁人推动来行使。在欧美等发达国家,手动轮椅己被逐渐淘汰,取而代之的是性能优越、操作简便、运行安全可靠的电动轮椅。随着经济的发展和人民生活水平的提高,我国对电动轮椅也逐步有了需求。电动轮椅作为一种新型交通工具,具有较广阔的市场前景和社会意义。
4.美国的pride公司开发的电动轮椅车采用两个有刷直流电机作为其驱动电机,装在操纵手柄里的控制器实现轮椅车的直行与转向。该电动轮椅操作方便、半径小,适于室内使用。德国亚探工业大学开发了一种智能电动轮椅。该轮椅设置有小型电脑和摄像机。摄像机聚焦用户面部的动作,每秒生成数十张张图像并传送给小型电脑。电脑对图像进行处理,分析出眉毛、眼角、嘴角等部位的特征点并随时跟踪这些特征点的位置变化,判断各个部位的动作,然后再根据这些动作发出相应的控制指令,指挥轮椅车前进、停止、左转或右转等等。这种轮椅不但能帮助老年人、轻度残疾人士,而且对那些颈椎以下都不能动弹的重症瘫痪病患者帮助更大。日本工业科学与技术局研制成功一种装有微型电脑的电动轮椅。这种轮椅在残疾人不能使用手与脚的情况下,利用一个操纵杆和声控系统,通过口令使轮椅沿水平方向直线行驶和转弯,同时,还能升高到一般人站立的高度,方便残疾人的日常工作与生活。
5.中国专利cn102697609b公开了一种电动轮椅及其转向控制装置。该电动轮椅包括前支架、后支架、主支架和座椅支架,走行装置包括一对前轮和一后轮,转向控制装置包括:闭合的具有一定强度的柔性连接件及对柔性连接件支撑和导向的三对导轮;柔性连接件缠绕并套设于后轮的转轴以带动后轮转向;从转轴延伸出的柔性连接件向前向外延伸至第一导轮,后向前至第二导轮;再向后至第三导轮,与第二导轮同轴心的连接有操作手柄,以通过操作操作手柄以带动柔性连接件沿缠绕于第二导轮;从第三导轮延伸出的柔性连接件水平延伸至对侧的第三导轮。
6.中国专利cn103735375b公开了一种电动轮椅万向移动转换机构,包括转轴固定板、万向承重轮安装件、万向承重轮、安装筒、撑杆、踏脚板、顶块、转轴。两块转轴固定板和
两个安装筒分别固定连接在电动轮椅车的底座上,转轴穿过转轴固定板,转轴两端分别固定连接脚踏板,安装筒上端设有顶块,且顶块固定连接在转轴上,安装筒内通过弹簧连接撑杆,撑杆下端穿过安装筒与万向承重轮安装件固定连接,撑杆上端面与顶块接触连接,万向承重轮安装件下面安装万向承重轮。
7.上述现有技术的轮椅行进方向、速度和转向控制较为复杂、不够完善,控制的实时性、准确性和便利性有待提高,尤其是需要独立的方向控制组件和速度控制组件,调控算法相对复杂。同时,现有技术的轮体的越障性能和轮椅整体的抗震性能同样较为欠缺,需要一种能够通过经济有效性的方式,针对性地满足轻障人群的轮椅,其结构、控制方式简单、易操作,具有提高的越障和减震性能。
8.此外,一方面由于申请人所理解的本领域技术人员与审查部门必然有所差异;另一方面由于发明人做出本发明时研究了大量文献和专利,但篇幅所限并未详细罗列所有的细节与内容,然而这绝非本发明不具备这些现有技术的特征,相反本发明已经具备现有技术的所有特征,而且申请人保留依据审查指南相关规定随时在背景技术中增加相关现有技术之权利。
技术实现要素:
9.本发明提供了一种轮椅,可以是手动轮椅,也可以是电动轮椅,还可以是手动和电动切换控制的轮椅。
10.本发明在第一方面提供一种适用于轻障人群的轮椅,至少包括沿所述轮椅的车身方向设置的彼此同轴的第一前轮、第二前轮,和彼此同轴的第一后轮和第二后轮。所述第一前轮和第二前轮是麦克纳姆轮。所述第一后轮和第二后轮是直行轮。
11.根据一种优选的实施方式,所述第一前轮和第二前轮是从动轮。所述第一后轮和第二后轮是驱动轮。
12.根据一种优选的实施方式,所述第一后轮和第二后轮分别由彼此独立的第一电机和第二电机控制。
13.根据一种优选的实施方式,在行进过程中,第一后轮的速度为v1,第二后轮的速度为v2,当v1=v2时,所述轮椅沿车身方向前进或后退。
14.根据一种优选的实施方式,当v1<v2时,所述轮椅朝向所述第一后轮的一侧行进。当v1>v2时,所述轮椅朝向所述第二后轮的一侧行进。
15.根据一种优选的实施方式,所述v1和v2之间的差值越大,所述轮椅朝向所述第一后轮或第二后轮一侧的行进速度越大。所述v1和v2之间的差值越小,朝向所述第一后轮或第二后轮一侧的行进速度越小。
16.根据一种优选的实施方式,所述第一前轮和第二前轮的半径均为r1,所述第一后轮和第二后轮的半径均为r2,其中,r1≤r2。
17.根据一种优选的实施方式,所述第一前轮与第二前轮的距离为d1,所述第一后轮与第二后轮的距离为d2,其中,d1≤d2。
18.本发明第二方面提供一种轮椅,至少包括沿所述轮椅的车身方向设置的彼此同轴的第一前轮、第二前轮,和彼此同轴的第一后轮和第二后轮。所述轮椅通过所述第一后轮和第二后轮的速度差实现轮椅行进方向的改变。
19.根据一种优选的实施方式,所述轮椅通过所述第一后轮和第二后轮的速度差的大小实现轮椅侧移速度的调节。
20.本发明的有益技术效果包括:
21.采用独立双电机分别驱动直行轮作为后轮和驱动轮,麦克纳姆轮作为前轮和从动轮,与直行轮的驱动轮配合,区别于现有技术的全都为直行轮的差速转向控制系统,只需要分别调控第一电机和第二电机驱动第一后轮和第二后轮的速度以及速度差,即可实现轮椅的行进方向以及侧移速度的调节,控制变量少,控制精度也能够满足轻障人群轮椅的普遍需求,结构简单,便于轻障人群普遍适用。
附图说明
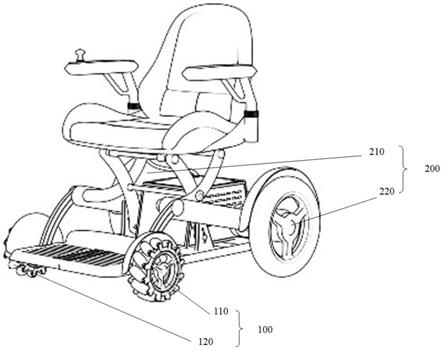
22.图1是本发明的一个优选实施方式的结构示意图;
23.图2是本发明的第一凸部和第一凹部的一种优选实施例的示意图。
24.附图标记列表
25.101:第一前轮
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
102:第二前轮
26.103:第一后轮
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
104:第二后轮
27.105:第一凹部
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
106:第一凸部
具体实施方式
28.下面结合附图1和附图2进行详细说明。
29.实施例1
30.本实施例公开了一种适用于轻障人群的轮椅,也可以是一种转运装置,也可以是一种移动装置。本实施例的轮椅包括用于支撑轮椅整体的支撑部,能够与使用者身体直接接触且支撑其身体部位的座椅部,实现轮椅行进和停止的移动部,以及实现轮椅启停和转向的控制部。
31.优选地,移动部包括沿所述轮椅的车身方向设置的彼此同轴的第一前轮101、第二前轮102,彼此同轴的第一后轮103和第二后轮104以及制动装置。优选地,座椅部包括坐垫、靠背、扶手和踏板。优选地,支撑部包括连接且容纳第一前轮101和第二前轮102的前架体,连接且容纳第一后轮103和第二后轮104的后架体,支撑座椅部的主架体以及底板。控制部包括操作单元、致动单元、柔性连接件以及支撑或缠绕柔性连接件的导轮。
32.优选地,第一前轮101和第二前轮102是麦克纳姆轮。第一后轮103和第二后轮104是直行轮。第一前轮101和第二前轮102是从动轮。第一后轮103和第二后轮104是驱动轮。麦克纳姆轮是一种具有许多位于机轮周边的轮轴的中心轮的组件。呈角度的周边轮轴将一部分的机轮转向力转化到机轮法向力上面。依靠各自机轮的方向和速度,这些力的最终合成在任何要求的方向上产生一个合力矢量从而保证了这个平台在最终的合力矢量的方向上能自由地移动,而不改变机轮自身的方向。在它的轮缘上斜向分布着许多小滚子,故轮子可以横向滑移。小滚子的母线特殊,当轮子绕着固定的轮心轴转动时,各个小滚子的包络线为圆柱面,所以该轮能够连续地向前滚动。
33.优选地,致动单元包括第一电机和第二电机。第一电机和第二电机设置于底板上。第一后轮103和第二后轮104分别由彼此独立的第一电机和第二电机驱动控制。在普通直行
轮的转向过程中,左右驱动车轮的转速虽相等而行程不同的矛盾导致某一驱动车轮产生滑转或滑移,其使轮胎过早磨损且无益地消耗功率。本实施例通过设置由电机独立驱动的作为驱动轮的直行轮和作为从动轮的麦克纳姆轮相互配合实现轮椅的前进、后退和转向,在转向过程中,麦克纳姆轮本身并不发生偏转。
34.优选地,在行进过程中,第一后轮103的速度为v1,第二后轮104的速度为v2,当v1=v2时,所述轮椅沿车身方向前进或后退。优选地,当v1<v2时,所述轮椅朝向所述第一后轮103的一侧行进。当v1>v2时,所述轮椅朝向所述第二后轮104的一侧行进。优选地,所述v1和v2之间的差值越大,所述轮椅朝向所述第一后轮或第二后轮一侧的行进速度越大。所述v1和v2之间的差值越小,所述轮椅朝向所述第一后轮或第二后轮一侧的行进速度越小。
35.优选地,在本实施例的轮椅行驶过程中需要前进时,可将操作单元向前移动,此时,第一电机和第二电机分别向第一后轮103和第二后轮104提供相同的向前滚动的驱动力,第一后轮103和第二后轮104由此带动第一前轮101和第二前轮102,进而轮椅整体向前移动。轮椅行驶过程中需要后退时,可将操作单元向后移动,此时,第一电机和第二电机分别向第一后轮103和第二后轮104提供相同的向后滚动的驱动力,第一后轮103和第二后轮104由此带动第一前轮101和第二前轮102,进而轮椅整体向后移动。
36.优选地,轮椅行驶过程中需要左行时,可将操作单元向左移动,此时,第一电机驱动第一后轮103使其具有速度v1,第二电机驱动第二后轮104使其具有速度v2,v1小于v2,从而轮椅向左行进。轮椅行驶过程中需要右行时,可将操作单元向右移动,第一电机驱动第一后轮103使其具有速度v1,第二电机驱动第二后轮104使其具有速度v2,v1大于v2,从而轮椅向右行进。当需要刹车时,使操作单元回复原位,第一电机和第二电机逐步减小第一后轮和第二后轮的驱动力至零,同时制动装置启动,以避免急停的方式实现轮椅的制动提高使用者的舒适性,同时能够降低乘坐者在轮椅减速时飞出轮椅的风险,保护乘坐者的人身安全。
37.优选地,轮椅的移动部的制动装置以如下控制方法控制轮椅减速以避免轮椅急停的:
38.当接收到制动指令时,检测轮椅此时的移动速度;
39.当轮椅的移动速度大于第一阈值时,控制以设定的刹车频率执行间歇性刹车制动,以保持乘坐者和轮椅之间的加速度差异,避免乘坐者和轮椅之间的速度差异太大而使用者在刹车过程中与轮椅产生相对位移即滑出轮椅;其中,刹车频率和每一次刹车的时长以第二检测周期t内乘坐者和轮椅之间的加速度差异大小确定,当轮椅的加速度大于乘坐者的加速度时,缩短每一次刹车的时长,以减小乘坐者和轮椅之间的速度变化差异,避免乘坐者相对轮椅发生相对位移,从轮椅的前方飞出;
40.当轮椅的移动速度小于第一阈值时,控制持续刹车制动。
41.优选地,第二检测周期t至多为刹车周期的1/2。
42.这样设置的优点在于,既能够保证轮椅的乘坐者的安全性,又能够保证轮椅的减速效率。间歇性刹车制动的方式能够保证轮椅的车轮不会抱死,避免了轮椅发生滑移的风险;并且这样的方式能够通过控制刹车频率和每一次刹车的时长来控制乘坐者和轮椅的加速度差异大小在安全的范围内。由于乘坐者的速度是由轮椅传递的,因此开始刹车时乘坐者和轮椅的速度是一致的,因此控制加速度的差异能够控制乘坐者和轮椅的相对速度,避免乘坐者从轮椅上飞出。但这样的方式减速需要的时间太长,尤其是在轮椅速度较大的情
况下。由于轮椅的乘坐者在轮椅刹车时由于惯性会以刹车时的速度朝前飞出,因此速度较大时急刹车乘坐者飞出的风险更大,而在轮椅速度较小时,使用者飞出的风险更小。因此为保证减速效率,采用进行速度分段减速的方式,在速度较快时,采用间歇减速的方式,缩小轮椅的加速度和乘坐者的加速度之间的差异;当速度降低到一定阈值后(该阈值为使用者的基于该速度不会从轮椅中飞出的速度,根据不同使用者与轮椅的坐垫之间的静摩擦力的大小,该阈值针对不同体重的使用者而言可调整。),由于此时快速刹车使用者也不会存在掉落出轮椅的风险,因此此时能够控制采用快速刹车的方式,节省刹车时间。
43.根据一种优选的实施方式,座椅部的坐垫、靠背和扶手彼此以小于九十度的角度结合,以在乘坐者乘坐轮椅时降低乘坐者的重心,并且扶手能够围绕乘坐者以保护乘坐者避免在刹车时由于惯性而飞出轮椅。即,坐垫和靠背彼此连接并形成略小于九十度的夹角;优选地,坐垫设置为与水平面存在一定夹角,坐垫靠近轮椅前进方向的一端设置为较坐垫远离前进方向的一端距离地面的高度更高,从而使用者臀部在接触坐垫远离前进方向的一端时,能够降低使用者的重心,并且在使用者由于惯性相对轮椅向前飞出时,能够增加坐垫与乘坐者之间的摩擦力,降低乘坐者飞出轮椅的风险。优选地,扶手至少包括在乘坐者乘坐轮椅时位于乘坐者左右两侧的第一扶手和第二扶手,第一扶手和第二扶手设置于坐垫的两侧,并且设置为远离地面的一端朝向使用者倾斜,以在使用者由于惯性而飞出轮椅时,能够接触使用者的腰腹部,增加使用者与轮椅的接触面积,为使用者提供一定的防止乘坐者飞出的阻力。
44.上述的前进、后退、左右转以及刹车时的操作方式,与人的操作习惯相一致,并且操作简单,能够很灵活的实现行进方向的调节和控制,不会产生不连贯的感觉,提高了乘坐舒适度。并且,本实施例的转向控制装置均具有成本低、易实现及维修保养容易的优点。通过这种方式,只需要调节两个变量v1和v2即能够控制轮椅的行进方向以及相应的行进速度。使用者操作简便,电控系统也能够显著简化。
45.优选地,操作单元包括用于控制前进、后退、刹车以及行进方向的第一操作单元和用于控制行进速度的第二操作单元。第二操作单元能够设置为速度区间的操作形式。
46.电动轮椅驱动控制系统,特别是差速转向系统的研究,有助于提高产品的电子化、智能化程度。现有技术中的电动轮椅驱动控制系统差速转向技术的研究主要存在两个方向,其一是通过研制特殊结构的电机来实现,但该方法存在结构复杂、研制成本高、通用性差等缺点;其二是采用双控制器,通过相对独立的控制变量和控制模型来实现,但存在控制精度不高、难以消除控制盲区、控制器体积大、结构复杂等问题。本实施例采用独立双电机分别驱动直行轮作为后轮和驱动轮,麦克纳姆轮作为前轮和从动轮,与直行轮的驱动轮配合,区别于现有技术的全都为直行轮的差速转向控制系统,只需要分别调控第一电机和第二电机驱动第一后轮103和第二后轮104的速度以及速度差,即可实现轮椅的行进方向以及侧移速度的调节,控制变量少,控制精度也能够满足轻障人群轮椅的普遍需求,结构简单,便于轻障人群普遍适用。
47.优选地,所述第一前轮101和第二前轮102的半径均为r1,所述第一后轮103和第二后轮104的半径均为r2,其中,r1≤r2。优选地,所述第一前轮101与第二前轮102的距离为d1,所述第一后轮103与第二后轮104的距离为d2,其中,d1≤d2。通过该设置,第一前轮101和第二前轮102具有相对于第一后轮103和第二后轮104的更小的半径,轮椅在移动过程中,
尤其在地面存在障碍物的情况下能够具有更高的稳定性。通过使第一前轮101与第二前轮102之间的距离小于第一后轮103与第二后轮104之间的距离,一方面,轮椅行进过程中更加平稳,另一方面,差速转向控制的准确度更高。
48.优选地,所述麦克纳姆轮由轮毂和辊子构成。其中,轮毂构成轮体的支架,辊子按照其转轴与轮毂轴成45度角的方式安装在轮毂上。优选地,辊子的表面形成为非光滑的表面。优选地,辊子的表面形成若干紧密排列的由弹性材料构成的凸起。通过这种设置,一方面,能够为轮椅提供减震缓冲,第二方面,能够防止地面凹凸不平对轮椅行进方向和行进速度的影响,第三方面,能够防止地面的具有较小尺寸的障碍物卡入辊子之间的空隙中,阻碍轮椅的正常行进,第四方面,轮椅在地面行进时,可能左右轮接触的地面具有不同的摩擦系数,导致轮椅的差速控制出现偏差,该设置方式能够有效地减小地面摩擦系数的差异对轮椅差速控制的影响,使轮椅行进方向和速度更准确。优选地,辊子表面的密集排列的由弹性材料构成的凸起形成为能够与辊子可拆卸连接的辊子套筒。通过这种方式,当辊子套筒使用后磨损变形,影响轮椅行进时,能够便捷快速地更换辊子套筒,无需更换整个麦克纳姆轮,减小使用成本。
49.根据一种优选的实施方式,所述辊子套筒上的凸起至少包括第一摩擦点和第二摩擦点,所述第一摩擦点与所述第二摩擦点高度不同,所述第一摩擦点按照能够在遇到小颗粒障碍物时得到缓冲的方式排列构成若干缓冲空间,其中,所述第二摩擦点按照能够防止颗粒物卡入缓冲空间的方式排列在所述缓冲空间内。这样设置的优点在于:第一摩擦点和第二摩擦点能够增加与地面的摩擦系数,并且第一摩擦点构成的缓冲空间能够容纳一部分颗粒尺寸较小的障碍物,从而避免了该类障碍物对转向轮行进造成的影响;而尺寸较大的障碍物由于缓冲空间的存在也会对行进方向造成影响也会减小。第二摩擦点的设置使得进入到缓冲空间内的尺寸较大的障碍物会得到第二摩擦点的支撑,并且第二摩擦点之间也存在间隙,通过这样的不规则的间隙设置,使得不规则障碍物在缓冲空间内受到的点压力能够减小,从而不规则障碍物不会卡入到缓冲空间中。
50.根据一种优选的实施方式,第一前轮101与第二前轮102上按照能够减小与崎岖地面接触时的局部压力的方式设置有用于与地面接触的非平整的起伏态的第一接触面。优选地,第一后轮103和第二后轮104上也设置有第一接触面。优选地,第一接触面包括第一凹部105和围绕在第一凹部105外周的第一凸部106,其中,第一凹部105的弧度大于第一凸部106的弧度。优选地,第一凸部106和第一凹部105之间为光滑曲线形成的带有双曲率的非突变式曲面。以使得在触碰到凹凸不平的地面或路面上遇见有石子等障碍物时石子颗粒能够与辊子套筒之间的附着力发生非线性的动态变化,从而在轮子转动的过程中,石子与轮子之间的接触力不会发生突变,石子不易陷入到辊子套筒中卡住。这样的设置方式,一方面能够增加第一前轮101与第二前轮102与地面之间的摩擦,从而增加转运装置行进过程中的稳定性。另一方面使得第一前轮101与第二前轮102在坎坷不平的地面上行动时,通过第一凸部106和第一凹部105与坎坷地面形成形状互补,能够使得辊子在移动的过程中减少点接触的场景出现,保证在颠簸的过程中,辊子大部分与地面的接触为线接触,并且在线接触的情况下,第一凸部106和第一凹部105的成形能够与坎坷的地面形成更多的结构接触,以保证辊子能够与地面有充分的摩擦力接触,从而通过第一后轮103和第二后轮104的推动,辊子依然能够与地面产生推动辊子朝向待转向方向移动的滚动摩擦力。这样的情况下,辊子不会
由于与地面的短暂点接触而产生与待转向方向不同的运动,妨碍转运装置转向,能够保护转运装置在凹凸不平的地面转向时不被卡死。此外,具有双曲率的第一接触面的设置能够减少粘附性物质粘附的概率,粘附物质粘连转向轮表面阻碍转向轮的转动,尤其对于存在多个子轮的麦克纳姆轮,相邻的子轮之间存在间隙,当一个子轮表面上粘附有粘性物质时,粘附物质会随子轮的转动进入到相邻的子轮之间加塞,使得相邻的子轮的转动阻力增大,甚至直接卡住难以转动影响麦克纳姆轮的使用。而第一接触面的设置能够避免物质粘附到子轮上,因此就算在雨天的粘土地面上行走时,也能够避免粘土粘连到转向轮上,从而使得转运装置能够适应更多场景的使用。
51.实施例2
52.本发明第二方面提供一种轮椅,至少包括沿所述轮椅的车身方向设置的彼此同轴的第一前轮101、第二前轮102,和彼此同轴的第一后轮103和第二后轮104。所述轮椅通过所述第一后轮103和第二后轮104的速度差实现轮椅行进方向的改变。
53.优选地,所述轮椅通过所述第一后轮103和第二后轮104的速度差的大小实现轮椅侧移速度的调节。优选地,第一前轮101和第二前轮102是麦克纳姆轮。第一后轮103和第二后轮104是直行轮。其中,第一前轮101和第二前轮102是从动轮。第一后轮103和第二后轮104是驱动轮。
54.本实施例中,第一后轮103和第二后轮104为驱动轮,第一前轮101和第二前轮102没有源动力,为从动轮。后轮驱动,差速转向,前轮配合提供各个方向的速度,麦克纳姆轮的主体并不发生转动,就可以提供车身向各个方向移动的动能。
55.第一后轮103和第二后轮104分别由各自独立的电机控制,当左右速度大小不等时,左右后轮差速转动,会使整机产生一个转向趋势,而前轮麦克纳姆轮的主体轴相对于机身的方向并不需要改动,就能配合轮椅旋转提供所需方向的速度,前轮麦克纳姆轮的好处是,在坑洼不平的路面可以避免像传统轮椅万向轮一样,两轮轴转向,互成夹角,使得轮椅无法移动甚至发生危险。
56.优选地,第一电机和第二电机,相应的第一后轮103和第二后轮104采用手部摇杆操控,通过摇杆得到的电信号变化转化为电机旋转的机械变化,进而控制轮椅运动。摇杆的方向代表车子的行进方向,摇杆的幅度控制着行进的速度,松手摇杆归中控制刹车。通过手部控制可以实现前进、转弯、倒退、刹车和原地旋转等动作。
57.本实施例采用麦克纳姆轮能有效提高其越障能力,后轮无论是在前行还是转弯等过程中,都仅需要一个沿着轮椅车身方向的速度,而不需要垂直轮椅方向的速度,从而避免了不必要的负担与危险。后轮半径大于前轮半径,提高刹车性能以及轮椅静止的稳定性。
58.实施例3
59.本发明第三方面公开一种防偏移的轮椅,能够在轮椅行驶的过程中由于地面不平整而产生偏移时及时进行纠正,以降低轮椅行驶过程中或刹车过程中的侧翻的风险,并且保证轮椅行进路线的可控性。由于麦克纳姆轮对地面的平整度要求高,因此在移动的过程中路线纠偏尤为重要。
60.优选地,在轮椅与前进方向垂直的左右方向上分别设置有惯性测量装置,惯性测量装置设置为用于检测轮椅在左右方向上的加速度大小。
61.轮椅的控制部的致动单元以如下控制方法控制轮椅纠正偏移:
62.根据当前的控制指令生成此时理想左右方向上的加速度理想值;
63.将实际的加速度值与加速度理想值进行对比,
64.在实际的加速度值大于理想加速度值时,确定差异的加速度的方向,确定车辆路线的偏移方向;
65.控制偏移方向一侧的车轮的控制电机提升该车轮的速度,或者,
66.控制偏移方向对侧的车轮的控制电机降低该车轮的速度。
67.例如,当指令控制轮椅朝向正前方行进时,生成轮椅与前进方向垂直的左右方向上的加速度理想值均为零,而当左侧的实际的加速度值大于零时,判断车辆路线左偏,控制提升左侧车轮的速度或降低右侧车轮的速度,以纠正车辆的路线。
68.优选地,加速度以第一检测周期t1实时检测,第一检测周期t1的大小根据轮椅的实际速度的大小确定的,当轮椅的实际速度大于第一阈值时,缩短第一检测周期t1。
69.需要注意的是,上述具体实施例是示例性的,本领域技术人员可以在本发明公开内容的启发下想出各种解决方案,而这些解决方案也都属于本发明的公开范围并落入本发明的保护范围之内。本领域技术人员应该明白,本发明说明书及其附图均为说明性而并非构成对权利要求的限制。本发明的保护范围由权利要求及其等同物限定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。