1.本技术涉及医疗器械技术领域,特别涉及一种瓣膜缝合器。
背景技术:
2.二尖瓣为左心房(简称:la)和左心室(简称:lv)之间的单向“阀门”,可以保证血液从左心房流向左心室。请参见图1,正常健康的二尖瓣具有多根腱索。二尖瓣的瓣叶分为前叶和后叶,左心室处于舒张状态时,两者处于张开状态,血液从左心房流向左心室;左心室处于收缩状态时,腱索被拉伸,保证瓣叶不会被血流冲到心房侧,前、后叶闭合良好,从而保证血液从左心室经过主动脉瓣(简称:av)流向主动脉。若腱索或乳头肌出现病变,例如图2所示的后叶腱索断裂,当左心室处于收缩状态时,二尖瓣不能像正常状态时恢复至关闭状态,血流的冲力会进一步导致瓣叶脱入左心房,造成血液返流。
3.目前通常采用外科手术植入缝合线的方式治疗腱索病变,需要采用侵入性开胸技术,并实行全麻、中度低温体外循环作为辅助支持。这类外科手术存在手术过程复杂、手术成本高、病人创伤程度高、并发症风险高、住院时间长以及患者恢复过程痛苦等缺陷。
4.现有一种通过微创方式植入缝合线的器械,该器械通过夹持装置夹持瓣叶来植入缝合线。夹持装置包括夹持推杆、用于配合夹持瓣叶的远端夹头和近端夹头及连接于夹持推杆近端的夹持操作机构。夹持操作机构由远端向近端移动使远端夹头和近端夹头闭合,当夹持操作机构由远端向近端移动至预定位置时发出闭合声音反馈。操作者可根据声音反馈确认远端夹头与近端夹头是否闭合。然而由于制造工艺不可避免存在公差的问题,可能出现夹持推杆长度不足的情况,导致远端夹头与近端夹头夹持瓣叶闭合时,夹持操作机构无法移动至预定位置而发出声音反馈。而操作者为了确认远端夹头与近端夹头闭合,强制向近端移动夹持操作机构,会导致远端夹头与近端夹头过度夹紧瓣叶而夹伤瓣叶。
技术实现要素:
5.为了避免出现远端夹头与近端夹头过度夹紧瓣叶而夹伤瓣叶的问题,本技术提供一种瓣膜缝合器。
6.为了实现上述目的,本技术实施方式采用如下技术方案:
7.本技术提供一种瓣膜缝合器,包括推送装置与夹持装置。所述推送装置包括推送导管;所述夹持装置包括夹持推杆、近端夹头、远端夹头、夹持操作机构及弹性机构,所述夹持推杆为具有一定轴向长度的管状体或中空杆状体,所述夹持推杆活动地穿装在所述推送导管中,所述近端夹头设于所述推送导管的远端,所述远端夹头设于所述夹持推杆的远端,所述弹性机构固定连接所述夹持推杆的近端,所述夹持操作机构活动连接所述夹持推杆的近端及所述弹性机构,所述夹持操作机构带动所述夹持推杆由远端向近端移动使所述远端夹头与所述近端夹头闭合后,所述夹持操作机构压缩所述弹性机构,使所述夹持操作机构相对于所述夹持推杆向近端发生位移以发出声音反馈。
8.本技术提供的瓣膜缝合器,由于设有弹性机构,当夹持推杆长度不足以使夹持操
作机构由远端向近端移动至预定位置发出声音反馈时,弹性机构可被压缩使得夹持操作机构相对于夹持推杆向近端位移而到达预定位置发出声音反馈,从而避免操作者为获得声音反馈强制向近端移动夹持操作机构,使得远端夹头和近端夹头过度夹紧瓣叶而夹伤瓣叶,提高了手术的安全性及可靠性。
附图说明
9.图1为人体心脏在正常健康情况下的结构示意图;
10.图2为人体心脏在后叶腱索断裂情况下的结构示意图;
11.图3为本技术一实施方式提供的瓣膜缝合器的立体示意图;
12.图4为图3所示的瓣膜缝合器的分解示意图;
13.图5为本技术一实施方式提供的缝合线的立体示意图;
14.图6a为本技术一实施方式提供的瓣膜缝合器的探针部分伸出推送导管的立体示意图;
15.图6b为图6a的局部区域i的放大示意图;
16.图7a为本技术一实施方式提供的瓣膜缝合器的探针完全位于推送导管中的立体示意图;
17.图7b为图7a的局部区域ii的放大示意图;
18.图8为图6a所示的瓣膜缝合器的分解示意图;
19.图9为图7a所示的瓣膜缝合器的分解示意图;
20.图10为本技术一实施方式提供的推送手柄的分解示意图;
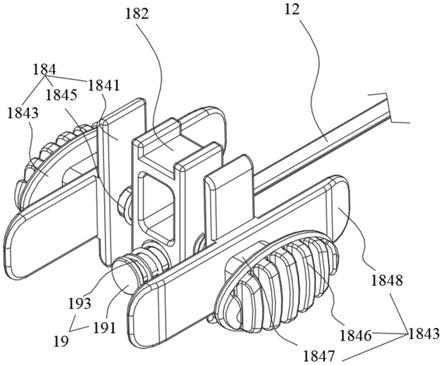
21.图11为本技术一实施方式提供的夹持装置的夹持操作机构的立体示意图;
22.图12为本技术一实施方式提供的夹持装置的夹持操作机构的分解示意图;
23.图13为本技术一实施方式提供的穿刺手柄与保险件处于锁定状态的示意图;
24.图14为本技术一实施方式提供的穿刺手柄与保险件处于解锁状态的示意图;
25.图15为本技术一实施方式提供的穿刺装置与保险件的立体示意图;
26.图16为本技术一实施方式提供的穿刺手柄与保险件处于解锁状态的另一示意图;
27.图17为本技术一实施方式提供的保险件的立体示意图;
28.图18为本技术一实施方式提供的夹持辅助装置的立体示意图;
29.图19为本技术一实施方式提供的夹持辅助装置的辅助操纵机构的立体示意图;
30.图20为本技术一实施方式提供的夹持辅助件配合夹持装置夹持瓣叶的示意图;
31.图21为本技术一实施方式提供的推送导管的剖视图;
32.图22-图33为本技术一实施方式提供的瓣膜缝合器将缝合线植入瓣叶的实施过程示意图。
具体实施方式
33.为了使本技术的目的、技术方案和优点更加清楚,下面将结合附图对本技术作进一步地详细描述。
34.应当理解的是,可以在本技术中使用的诸如“包括”以及“可以包括”之类的表述表示所公开的功能、操作或构成要素的存在性,并且并不限制一个或多个附加功能、操作和构
成要素。在本公开中,诸如“包括”和/或“具有”之类的术语可解释为表示特定特性、数目、操作、构成要素、组件或它们的组合,但是不可解释为将一个或多个其它特性、数目、操作、构成要素、组件或它们的组合的存在性或添加可能性排除在外。
35.此外,在本技术中,表述“和/或”包括关联列出的词语中的任意和所有组合。例如,表述“a和/或b”可以包括a,可以包括b,或者可以包括a和b这二者。
36.在本技术中,包含诸如“第一”和“第二”等的序数在内的表述可以修饰各要素。然而,这种要素不被上述表述限制。例如,上述表述并不限制要素的顺序和/或重要性。上述表述仅用于将一个要素与其它要素进行区分。在不脱离本公开的范围的情况下,第一要素可以被称为第二要素,类似地,第二要素也可以被称为第一要素。
37.当组件被称作“连接”或“接入”其他组件时,应当理解的是:该组件不仅可以直接连接到或接入到其他组件,而且在该组件和其它组件之间还可以存在另一组件。另一方面,当组件被称作“直接连接”或“直接接入”其他组件的情况下,应该理解它们之间不存在组件。
38.在介入医疗器械技术领域,一般将靠近操作者的方位定义为近端,远离操作者的方位定义为远端。将柱体、管体等一类物体的中轴线的方向定义为轴向。径向是指在径向平面内通过中轴线的方向,例如,沿直径或半径的直线方向,或垂直于中轴线的直线方向。
39.请参阅图3与图4,本技术的一实施方式提供一种瓣膜缝合器100,用于将缝合线60(如图5所示)植入患者体内,替代患者心脏内病变或者断裂的腱索;或用于将多根缝合线60植入患者体内并彼此固定,实现心脏瓣膜(如二尖瓣、三尖瓣)缘对缘修复。瓣膜缝合器100包括夹持装置10、穿刺装置20、推送装置30、夹持辅助装置40及探测装置50。推送装置30用于将夹持装置10输送至瓣膜附近的预定位置。夹持装置10用于容置缝合线60及夹持瓣膜的瓣叶。夹持辅助装置40用于支撑在瓣叶下表面并与夹持装置10配合夹持瓣叶。探测装置50用于探测夹持装置10是否夹持瓣膜的瓣叶及对瓣叶的夹持效果。穿刺装置20用于在夹持装置10夹持瓣膜后穿刺瓣膜。
40.以缝合线60作为人工腱索,实现瓣膜的腱索修复为例进行详细描述。请参阅图5,缝合线60包括一段具有柔性的缝合线主体62。缝合线主体62具有相对的第一端和第二端。第一端和/或第二端连接有固定件64。固定件64用于与穿刺装置20不可拆卸固定连接或可拆卸固定连接。固定件64可以设置在缝合线主体62的两端,也可以仅设置在缝合线主体62的一端。在本实施方式中,缝合线主体62的两端均设有固定件64。缝合线60的数量可以是一根,也可以是两个或者多根。缝合线主体62的材料可以是与人体相容的高分子材料或者较为柔软的金属材料等,优选为聚对苯二甲酸乙二醇酯(polyethylene terephthalate,pet)、膨体聚四氟乙烯(expended polytetrafluoroethylene,e-ptfe)等高分子材料。本实施方式中,缝合线主体62用于植入心脏内,替代心脏内的病变腱索,即,缝合线主体62的一端固定在瓣叶上,另一端固定在心室壁上或者乳头肌等部位,以替代病变的腱索,维持瓣叶与心室壁之间的张力。
41.请结合参阅图6a至图10,推送装置30包括推送导管32及连接于推送导管32近端的推送手柄34。推送手柄34用于操纵整个瓣膜缝合器100向远端推送或者向近端回撤。本实施方式中,推送手柄34包括第一壳体342和可拆卸盖合于第一壳体342上的第二壳体344,推送导管32为具有一定轴向长度的管状体或者具有内腔的杆状体。
42.请参阅图6a至图7b,夹持装置10包括容置有缝合线60的夹持推杆12及用于配合夹持瓣叶的远端夹头14和近端夹头16。远端夹头14设于夹持推杆12的远端,近端夹头16设于推送导管32的远端。夹持推杆12活动地穿装在推送手柄34的内腔及推送导管32中。
43.夹持推杆12为具有一定轴向长度的管状体或中空杆状体,横截面优选为椭圆形或者圆形,且夹持推杆12中沿轴向设有缝合线通道122(如图4所示)。远端夹头14中设有与缝合线通道122相连通的两个缝合线收容腔142(如图7b所示),两个缝合线收容腔142分别贯通至远端夹头14的夹持面。缝合线60的缝合线主体62收容于缝合线通道122及缝合线收容腔142中。远端夹头14的夹持面还开设有分别用于容置缝合线60的两个固定件64的两个固定腔144(如图7b所示)。每个固定腔144分别与一个缝合线收容腔142轴向连通。
44.请参阅图4、图11与图12,夹持装置10还包括连接于夹持推杆12近端的夹持操作机构18及弹性机构19。夹持操作机构18设于推送手柄34。夹持操作机构18用于驱动远端夹头14与近端夹头16闭合或分离。本实施方式中,近端夹头16与远端夹头14的形状与推送导管32的形状配合一致,远端夹头14和近端夹头16在闭合后形成外表光滑的整体,以便于推送并减轻对患者伤口的损伤。
45.夹持推杆12的近端自推送导管32的近端伸出,弹性机构19固定连接夹持推杆12的近端,夹持操作机构18活动连接夹持推杆12的近端及弹性机构19。夹持操作机构18带动夹持推杆12由远端向近端移动使远端夹头14与近端夹头16闭合后,夹持操作机构18压缩弹性机构19,使夹持操作机构18相对于夹持推杆12向近端发生位移以发出声音反馈。
46.由于瓣膜缝合器100设有弹性机构19,当夹持推杆12长度不足以使夹持操作机构18由远端向近端移动至预定位置发出声音反馈时,弹性机构19可被压缩使得夹持操作机构18相对于夹持推杆12向近端位移而到达预定位置发出声音反馈,从而避免操作者为获得声音反馈强制向近端移动夹持操作机构18,使得远端夹头14和近端夹头16过度夹紧瓣叶而夹伤瓣叶,如此,提高了手术的安全性及可靠性。
47.推送手柄34的第二壳体344的内表面沿轴向设有滑移槽345(如图9与图10所示),夹持操作机构18包括连接的滑移件182与操作组件184,滑移件182滑动设于滑移槽345中。滑移槽345用于对滑移件182的移动进行导向并限位。弹性机构19与滑移件182活动连接,弹性机构19与夹持推杆12的近端固定连接。夹持推杆12的近端抵持滑移件182。操作组件184用于驱动滑移件182沿滑移槽345轴向滑动。具体地,滑移件182开设有一推杆安装孔1822,夹持推杆12的近端收容于推杆安装孔1822内而抵持滑移件182,弹性机构19部分收容于推杆安装孔1822内并与夹持推杆12的近端固定连接。如此,弹性机构19和夹持推杆12部分穿设于滑移件182的推杆安装孔1822中而连接,夹持推杆12的近端抵持滑移件182而保持在推杆安装孔1822中,滑移件182可压缩弹性机构19而使夹持操作机构18相对于夹持推杆12向近端位移而到达预定位置发出声音反馈。
48.进一步地,操作组件184与滑移件182弹性连接,推送手柄34的内表面还设有导向槽347,操作组件184滑动设于导向槽347(如图10所示)中。导向槽347包括相连的径向导向槽3471及轴向导向槽3473,轴向导向槽3473相较于径向导向槽3471更靠近推送手柄34的中轴线。导向槽347大致为l形槽状结构,径向导向槽3471连通于轴向导向槽3473的近端。操作组件184可在自然状态与压缩状态之间转换,操作组件184由轴向导向槽3471移动到径向导向槽3473时,操作组件184由压缩状态转换为自然状态而冲击推送手柄34以产生声音反馈。
49.为方便操作,滑移件182的两侧均连接有操作组件184。推送手柄34的侧面还设有操作通槽348(如图9与图10所示)。操作组件184包括滑动板1841、操作件1843及弹性件1845。滑动板1841连接操作件1843,滑动板1841滑动设于导向槽347中,操作件1843卡设于操作通槽348并露出推送手柄34外。操作通槽348起到限制夹持操作机构18的轴向移动距离的作用。通过操作操作件1843在操作通槽348移动带动滑移件182移动,从而控制远端夹头14与近端夹头16的开合。弹性件1845连接于滑移件182与滑动板1841之间,在弹性件1845由压缩状态转换为自然状态时,操作件1843冲击推送手柄34以产生声音反馈,方便操作者确认远端夹头14与近端夹头16闭合夹持住瓣叶。
50.夹持操作机构18还包括安装杆186,安装杆186连接于滑移件182和操作件1843之间。具体地,滑移件182沿径向的两侧设有安装杆186,操作件1841与安装杆186连接。弹性件1845套设于安装杆186外并设于滑移件182与操作件1843之间。在图示的示例中,滑动板1841与操作件1843为一体,即安装杆186也连接于滑移件182和滑动板1841之间。
51.当滑动板1843位于径向导向槽3471时,远端夹头14与近端夹头16闭合;当滑动板1843位于轴向导向槽3473时,远端夹头14与近端夹头16分离。操作组件184通过弹性件1845的形变在自然状态与压缩状态之间转换。弹性件1845可为弹簧。弹性件1845由自然状态转换为压缩状态时,滑动板1843可由径向导向槽3471移动到轴向导向槽3473;弹性件1845由压缩状态转换为自然状态时,滑动板1843由轴向导向槽3471移动到径向导向槽3473,使得操作件1841冲击推送手柄34产生声音反馈,提示操作者远端夹头14与近端夹头16已经闭合。
52.操作件1843包括依次连接的操作部1846、连接部1847及反馈部1848。连接部1847穿设于操作通槽348,操作部1843位于推送手柄34外,反馈部1848收容于推送手柄34的内腔中,在弹性件1845由压缩状态转换为自然状态时,反馈部1848冲击推送手柄34的内侧面以产生声音反馈。本实施方式中,反馈部1848沿轴向延伸,反馈部1848可与推送手柄34的第二壳体344的内侧面抵接,增强夹持操作机构18的稳定性。操作部1846、连接部1847及反馈部1848可以一体成型,也可以分开独立设置,本技术对操作件1843的结构不作限定。
53.可以理解,当远端夹头14与近端夹头16闭合(如图22所示)时,滑动板1841位于径向导向槽3471中。当操作部1846被操作者按压,操作件1843压缩弹性件1845,使滑动板1841可从径向导向槽3471移动至轴向槽3473,此时控制操作件1843带动滑移件182及夹持推杆12向远端移动,使远端夹头14远离近端夹头16,形成如图23所示的张开状态,在远端夹头14与近端夹头16之间形成瓣叶容纳空间。微调瓣膜缝合器100远端使得瓣叶进入到瓣叶容纳空间(如图24所示)后,控制操作件1843向近端移动,滑动板1841可从轴向导向槽3473移动至径向导向槽3471,同时滑移件182带动夹持推杆12向近端移动,使得远端夹头14向近端夹头16靠近,形成如图20与图25所示的夹持状态。此时,瓣叶被夹持装置10夹持并固定。由于滑动板181处于轴向导向槽3473时,弹性件1845被压缩,当滑动板1841从轴向导向槽3473移动至径向导向槽3471时,弹性件1845恢复至自然状态产生弹力,使得反馈部1848冲击推送手柄34的内侧面而发出“卡”的声音反馈。当操作者或用户听到“卡”的声音,即可确定远端夹头14与近端夹头16闭合,将瓣叶夹持。
54.由于制造工艺不可避免存在公差的问题,可能出现夹持推杆12长度不够的情况,导致远端夹头14与近端夹头16夹持瓣叶闭合时,滑动板1841无法从轴向导向槽3473移动至
径向导向槽3471而发出声音反馈。然而操作者需根据声音反馈来确认远端夹头14与近端夹头16是否闭合。这样,为了听到声音反馈,操作者会强制向近端移动操作件1843。本技术中,夹持推杆12与滑移件182通过弹性机构19弹性连接,利用弹性机构19被压缩提供空间使夹持推杆12在长度不够的情况下,滑动板1841能够被操作件1843带动从轴向导向槽3473移动至径向导向槽3471从而发出声音反馈,防止远端夹头14和近端夹头16过度夹紧瓣叶而夹伤瓣叶。
55.本实施方式中,弹性机构19包括第一连接件191和弹性元件193。第一连接件191与夹持操作机构18活动连接,具体与夹持操作机构18的滑移件182活动连接。第一连接件191的远端与夹持推杆12的近端固定连接。夹持推杆12的近端抵持夹持操作机构18,具体抵持夹持操作机构18的滑移件182。弹性元件193套设于第一连接件191外并位于第一连接件191的近端与夹持操作机构18之间。
56.具体地,第一连接件191包括主体1911及设于主体1911近端的凸沿1913。主体1911活动穿设于夹持操作机构18中,具体活动穿设于夹持操作机构18的滑移件182中。主体1911的远端与夹持推杆12的近端固定连接。弹性元件193套设于主体1911外,弹性元件193位于凸沿1913与夹持操作机构18之间。其中,夹持推杆12的近端收容于推杆安装孔1822内,主体1911与弹性元件193部分收容于推杆安装孔1822内,夹持推杆12的近端与主体1911固定连接并抵持滑移件182而保持在推杆安装孔1822中。由于凸沿1913的存在,滑移件182由远端向近端移动时能够压缩弹性元件193,使得滑动板1841能够被操作件1843带动从轴向导向槽3473移动至径向导向槽3471从而发出声音反馈。
57.进一步地,弹性机构17还包括第二连接件194,用于容置夹持推杆12的近端。第二连接件194固定连接于主体1911的远端与夹持推杆12的近端之间,即主体1911的远端与第二连接件194固定连接,夹持推杆12的近端与173第二连接件194固定连接。具体地,第一连接件191的远端、第二连接件194、夹持推杆12的近端均设有至少一个连接孔,三者可通过螺钉或铆钉等方式固定连接,在图12的示例中,通过螺钉固定连接。夹持推杆12的近端置于第二连接件194的容纳槽内,螺钉依次穿过夹持推杆12、第二连接件194、第一连接件191从而将三者固定连接。
58.在另一实施方式中,推送手柄34的内表面设有挡板(图未示)。弹性机构17包括第一连接件,第一连接件与夹持操作机构18活动连接,具体与夹持操作机构18的滑移件182活动连接。第一连接件包括弹性部和连接部。弹性部的径向尺寸大于连接部的径向尺寸,连接部与夹持推杆12的近端固定连接,夹持推杆12的近端抵持夹持操作机构18,具体抵持夹持操作机构18的滑移件182。弹性部的两端分别抵持夹持操作机构18的滑移件182和挡板。
59.具体地,夹持推杆12的近端收容于推杆安装孔1822内,第一连接件的连接部收容于推杆安装孔1822内,夹持推杆12的近端与连接部固定连接并抵持滑移件182而保持在推杆安装孔1822中。第一连接件的弹性部位于推杆安装孔1822外并抵持滑移件182。由于挡板的存在,滑移件182由远端向近端移动时能够压缩第一连接件的弹性部,使得滑动板1841能够被操作件1843带动从轴向导向槽3473移动至径向导向槽3471从而发出声音反馈。
60.请再次参阅图4、图9、图13-图16,穿刺装置20沿推送手柄34的轴向贯穿推送手柄34的内腔并活动地穿装在推送导管32中。穿刺装置20包括穿刺推杆22及设于穿刺推杆22远端的穿刺针头24。
61.本实施方式中,远端夹头14的夹持面所开设的两个固定腔144的位置与两个穿刺针头24的位置分别对应。由此,缝合线60的两个固定件64分别容置在远端夹头14中,且每个固定件64的近端分别对应于一个穿刺针头24。穿刺针头24在穿刺瓣叶后可与缝合线60的固定件64连接,以将缝合线主体62拉向近端。穿刺针头24与固定件64形成可拆卸固定连接或不可拆卸固定连接,例如,螺纹连接、粘接、通过粗糙面摩擦连接、过盈配合或者卡扣连接。固定件64的形状配合不同的连接方式,具体地,固定件64的外部通常为柱形,横截面形状可以是圆形、椭圆形、多边形等各种形状,优选圆形或椭圆形;固定件64的内表面设有凹槽或孔,穿刺针头24的远端设有用于与固定件64形成过盈配合或者卡扣连接的至少一个凸齿或至少一圈凸沿。在图示的示例中,固定件64为圆柱形,内表面径向设有三个凹槽,与穿刺针头24上的凸齿或凸沿之间配合卡接。
62.穿刺装置20还包括与穿刺推杆22近端连接的穿刺手柄26。推送手柄34的近端端部开设有一通孔,可供穿刺装置20的穿刺手柄26穿过,通孔大小与穿刺手柄26适配。穿刺手柄26部分位于推送手柄34的内腔中,部分位于推送手柄34外。穿刺推杆22的近端自推送导管32近端穿出并与穿刺手柄26相连接。通过穿刺手柄26的轴向移动,即可带动穿刺推杆22沿推送导管32的轴向移动,进而驱动穿刺针头24向远端穿刺或者向近端回撤。在瓣叶被夹持装置10夹持后,穿刺针头24可在穿刺手柄26驱动下,刺穿瓣叶并与缝合线60的固定件64连接,穿刺针头24与缝合线60通过固定件64连接成为一个整体,缝合线60不易与穿刺针头24脱离,操作者可方便快捷地将缝合线60与固定件64相连的一端或两端拉至心室壁或乳头肌的预定位置。
63.穿刺装置20还包括保险件28。保险件28活动套设于穿刺手柄26外并活动穿装于推送手柄34。保险件28用于锁定穿刺手柄26以限制穿刺手柄26沿轴向移动,以避免在不需要穿刺时操作者误触发穿刺手柄26。本实施方式中,保险件28与穿刺手柄26能够发生干涉从而锁定穿刺手柄26,推送手柄34开设有贯通内外表面的安装槽3422(如图9与图10所示),保险件28穿设于安装槽3422中。推送手柄34的内表面设有支撑件346,用于支撑穿刺手柄26及穿刺推杆22,从而使穿刺手柄26在推送手柄34的内腔中的高度固定。支撑件346设有卡槽3462,用于容纳部分保险件28。
64.请参阅图17,保险件28整体呈倒凸字型,保险件28包括连接设置的按压部282与连接部284,按压部282用于供操作者按压操作。连接部284包括连接的第一连接部2842与第二连接部2844,第一连接部2842的径向尺寸小于第二连接部2844的径向尺寸,第一连接部2842与卡槽3462滑动连接。按压部282连接第二连接部2844远离第一连接部2842的一端。在穿刺手柄26与保险件28处于锁定状态时,按压部282被按压使保险件28朝向卡槽3462的底面移动,使第一连接部2842填充卡槽3462,从而可解除保险件28与穿刺手柄26之间的锁定。
65.第一连接部2842设有第一容置槽281,第二连接部2844设有与第一容置槽281连通的第二容置槽283,第二容置槽283的径向空间大于第一容置槽281的径向空间,穿刺手柄26活动地穿装在第二容置槽283并与第二容置槽283的间隙配合。穿刺手柄26穿设于保险件28中与保险件28配合,减小两者配合空间,有利于瓣膜缝合器100减小尺寸。
66.较为具体的,请再次参阅图16,穿刺手柄26朝向卡槽3462的一侧设有干涉部262,干涉部262两侧凹陷形成第一凸块2622及轴肩2623。第一凸块2622穿设于第一容置槽281时,轴肩2623抵持第一连接部2842,阻止穿刺手柄26的轴向移动,实现保险件28锁定穿刺手
柄26,即保险件28与穿刺手柄26处于锁定状态。本实施方式中,穿刺手柄26的整体径向尺寸与第二容置槽283的径向尺寸配合。当第一凸块2622穿设于第二容置槽283时,轴肩2623也位于第二容置槽283中,轴肩2623未抵持第一连接部2842与第二连接部2844,穿刺手柄26可在第二容置槽283中沿轴向相对保险件28移动,即保险件28与穿刺手柄26处于解锁状态。
67.请再次参阅图13与图17,穿刺手柄26背向卡槽3462的一侧还设有滑槽264,即穿刺手柄26朝向按压部282的一侧设有滑槽264,第二连接部2844还设有第三容置槽285,第三容置槽285连通第二容置槽283远离第一容置槽281的一端。第三容置槽285的内表面设有第二凸块2822,在穿刺手柄26位于第二容置槽283及第三容置槽285时,第二凸块2822至少部分收容于滑槽264中。穿刺手柄26沿轴向相对保险件28移动时,第二凸块2822能够沿滑槽264移动,对穿刺手柄26相对保险件28的移动进行导向,提高了穿刺手柄26相对保险件28的移动的顺畅性及稳定性。本实施方式中,第三容置槽285的径向空间大于第二容置槽283的径向空间。可以理解,第三容置槽285的径向空间可小于或等于第二容置槽283的径向空间,保证第二凸块2822能够插入滑槽264即可。当然,第三容置槽285与第二凸块2822可以省略。
68.保险件28锁定穿刺手柄26时,按压部282收容于安装槽3422内,按压部282能够受力带动保险件28整体朝向卡槽3462的底面移动。本实施方式中,在保险件28与穿刺手柄26处于锁定状态时,按压部282填满安装槽3422并且按压部282的背离卡槽3462的表面与推送手柄34的外表面基本平齐,第一连接部2842卡设于卡槽3462并且第一连接部2842朝向卡槽3462的底面的表面与卡槽3462的底面存在一定距离。此时,第一凸块2622位于第一容置槽281内,第一连接部2842与轴肩2623阻挡穿刺手柄26向远端推送及移动。
69.当瓣膜缝合器100需要穿刺装置20进行穿刺时,按压部282被按压受力朝向卡槽3462移动,第一连接部2842填充卡槽3462,第一连接部2842朝向卡槽3462的底面的表面与卡槽3462的底面接触。此时,第一凸块2622脱离第一容置槽281,穿刺手柄26整体位于第二容置槽283和第三容置槽281中,穿刺手柄26可沿轴向推送及移动,第二凸块2822在滑槽264内滑动,保证穿刺手柄26推送的稳定性。
70.请再次参阅图4和图8,探测装置50用于检测瓣叶是否被夹持在远端夹头14和近端夹头16之间。探测装置50包括至少一个探针52及连接于每个探针52近端的探针操控机构54。探针52活动地穿装在推送手柄54的内腔及推送导管32中,用于探测夹持装置10是否夹持瓣膜的瓣叶及对瓣叶的夹持效果。探针操控机构54设于推送手柄34并能相对推送手柄34移动,用于驱动探针52伸出(向远端移动)推送导管32或缩回(向近端移动)推送导管32。本实施方式中,探测装置50包括两个探针52,两个探针52并列设置,且两个探针52与夹持推杆12之间的距离大致相等。
71.探针52的轴向长度优选为大于推送导管32的轴向长度。探针52活动地穿装在推送导管32中。近端夹头16的夹持面设有探针出口162,便于探针52的远端自推送导管中从探针出口162中伸出。对应的,远端夹头14的夹持面设有与探针出口162相对的、用于容纳探针52远端的探针收容腔146。当近端夹头16与远端夹头14闭合时,探针52的远端自探针出口162伸出后收容于探针收容腔146中。
72.探针52包括具有一定长度的探针主体,探针主体可以为实心或者空心结构。探针主体可以由金属材料、聚合物材料或者金属-聚合物材料制成。例如,探针主体可以是单层或者多层复合结构的实心杆状或空心管状结构,还可以由单根丝或者多根丝绕制而成。
73.当近端夹头16与远端夹头14闭合时,如果瓣叶被夹持在近端夹头16与远端夹头14之间,且瓣叶边缘与夹持推杆12接触,探针52远端自近端夹头16的夹持面穿出后就会受到瓣叶的阻挡无法继续向远端前进,表明瓣叶夹持效果较好,可以进行穿刺。此外,当探针52远端受到瓣叶阻挡不能进入探针收容腔时,也表明瓣叶边缘与缝合线主体62之间的位置相对固定,提高治疗效果。因此,通过机械结构的探针52即可有效地探测瓣叶夹持效果,器械结构简单、操作方便。
74.请再次参阅图9、图13与图14,探针操控机构54还包括与探针52近端固定连接的滑动件542,滑动件542沿轴向滑动设于推送手柄34。滑动件542轴向滑动时驱动探针52沿轴向移动。
75.本实施方式中,探针52的数量为两个,滑动件542的数量对应探针52的数量为两个。推送手柄34的第二壳体344的内表面设有关于推送手柄34的中轴线对称的两个滑动槽3441(如图9所示),每个滑动件542可在对应的滑动槽3441沿轴向移动。第一壳体342还设有与两个滑动槽3441一一对应的两个操控通槽3426,探针操控机构54还包括设于滑动件542上的操控件544,操控件544穿装于操控通槽3426中,操控件544用于驱动滑动件542沿推送手柄34的轴向滑动。两个操控件544分别自两个操控通槽3426露出并卡设在第一壳体342的外表面。操控通槽3426可以起到限制探针操控机构54沿轴向的移动距离的作用。每个探针52的近端分别与对应的滑动件542固定连接,操作者沿轴向控制操控件544,即可带动滑动件542沿轴向移动,从而驱动探针52自推送导管32中穿出或将探针52收回推送导管32中。
76.操控件544沿径向朝向推送手柄34的中轴线所在一侧设有指示部5442(如图15所示),第一壳体342的外表面在两个操控通槽3426之间设有标识341(如图10所示)。在本实施方式中,标识341包括第一标识3411及第二标识3412,第一标识3411与第二标识3412为两种不同的颜色,例如第一标识3411为红色,第二标识3412为绿色。分别控制两个操控件544向远端移动,如图26a、图26b、图26c所示,当至少一个指示部5442指向第一标识3411时,说明瓣叶夹持效果差;如图27所示,当两个指示部5442均指向第二标识3412时,说明瓣叶夹持效果好。可以理解,不限定第一标识3411与第二标识3412为颜色,第一标识3411与第二标识3412可以通过其他形式进行区别,例如,不同的字母等。
77.请再次参阅图13与图14,探针操控机构54还包括沿径向延伸的导滑轨546,导滑轨546设于滑动件542上,操控件544滑动连接于导滑轨546。具体地,导滑轨546具有导滑槽5460,操控件544可卡设于导滑轨546的导滑槽5460中并沿径向移动。操控通槽3426呈l型,包括轴向槽3427和连接轴向槽3427近端的径向槽3428(如图10所示)。径向槽3428的设置,可供操控件544沿径向移动,当操控件544处于径向槽3428中,探针52完全收容于推送导管32中,此时操控件544无法带动滑动件542沿轴向移动,从而可保持探针52收容于推送导管32中,避免手术过程中误操作。
78.进一步地,推送手柄34的第二壳体344的内表面设有定位槽349(如图10所示),探针操控机构54还包括定位件35和定位杆548。定位件35卡设于定位槽349内,定位件35开设有定位孔352以供定位杆548穿过,定位杆548的远端固定于滑动件542。探针操控机构54还包括推送弹性件(例如弹簧,图未示),定位杆548穿装于推送弹性件中,推送弹性件的近端收容于定位孔352中且远端抵接推送手柄34。操控件544处于径向槽3428时,探针52完全位于推送导管32中,定位件35压缩推送弹性件;操控件544由径向槽3428移动至轴向槽3427
时,探针52的远端在推送弹性件的弹性作用下从推送导管32的远端伸出。
79.较为具体地,在初始状态,操控件544处于径向槽3428中,定位杆548上的推送弹性件被压缩,探针52收容在推送导管32中。当将操控件544由径向槽3427移动至轴向槽3428,由于定位杆548上的推送弹性件由压缩状态恢复至自然状态产生弹力,可直接将探针52的远端从推送导管中32推出。
80.请参阅图7b、图18和图19,为了进一步加强夹持,瓣膜缝合器100还包括夹持辅助装置40。夹持辅助装置40包括至少一个夹持辅助臂42(图18中仅示例性的示出一个)及设于夹持辅助臂42远端的夹持辅助件44。夹持辅助臂42活动地穿装于推送导管32中。夹持辅助件42由弹性和/或柔性材料制成,夹持辅助臂42用于推动与其相连的夹持辅助件42从推送导管32的远端或夹持装置10的远端穿出,夹持辅助件42用于与夹持装置10配合夹持瓣叶。
81.进一步地,请再次参阅图9与图18,夹持辅助装置40还包括连接于夹持辅助臂42近端的辅助操纵机构46,辅助操纵机构46设于推送手柄34。夹持辅助臂42的近端自推送导管32中穿出并设置辅助操纵机构46。近端夹头16的夹持面、推送导管32的侧面或近端夹头16的侧面设有辅助件出口321。因此,辅助操纵机构46可驱动夹持辅助臂42推动夹持辅助件44从推送导管32远端或夹持装置10远端穿出。
82.推送导管32中沿轴向设有辅助臂收容腔328。在瓣膜缝合器100的穿刺装置20穿刺前,夹持辅助件44和夹持辅助臂42均收容在辅助臂收容腔328中。在本实施方式中,近端夹头16的侧面设置有辅助件出口321(如图9所示),辅助件出口321与辅助臂收容腔328相贯通。操作者向远端推送辅助操纵机构46,可驱动夹持辅助臂42推动夹持辅助件44从辅助件出口321中穿出,从而支撑在瓣叶的下表面,稳定搏动的瓣叶,减小瓣叶的活动幅度,与夹持装置10配合以夹持并固定瓣叶。
83.夹持辅助臂42为具有一定轴向长度的杆状或管状结构,且具有一定硬度或刚度以提供支撑性及可推送性。夹持辅助臂42可以由单层或者多层复合结构的空心或实心结构的金属杆或高分子材料杆制成,还可以由单根丝或者多根丝绕制而成。夹持辅助臂42可以由金属材料、聚合物材料或者金属-聚合物复合材料制成。
84.请参阅图20,夹持辅助件44支撑在瓣叶200下表面并与夹持装置10配合夹持瓣叶200。由于夹持辅助件44由弹性和/或柔性材料制成,其能够适应瓣叶200的解剖结构及瓣叶200的活动幅度,并避免损伤瓣叶200。弹性材料优选为形状记忆材料。夹持辅助件44可以由金属材料、聚合物材料或者金属-聚合物复合材料制成。本实施方式中,夹持辅助件44由带有形状记忆功能的弹性镍钛合金制成。
85.为了便于在推送导管32中被推送,夹持辅助件44包括压缩状态及自然状态时的伸展状态。夹持辅助件44在压缩状态时,可收容在推送导管22的辅助臂收容腔328中并被推送。当夹持辅助件44由辅助件出口321中伸出后,转变为伸展状态,可支撑在瓣叶200的下表面,稳定搏动的瓣叶200。本实施方式中,夹持辅助件44为由多根金属丝编织而成的网状结构。网状结构可以进一步热定型处理形成球状、柱状、巢状、扁圆状等结构。优选地,夹持辅助件44为编织网球状结构,在压缩状态时,编织网球状结构被径向压缩收容在辅助臂收容腔328中;在伸展状态时,编织网球状结构由辅助件出口321被推出自膨胀径向扩张成球状。
86.直径较大的夹持辅助件44与瓣叶200的接触面即为夹持辅助件44所在的平面,因此,夹持辅助装置40与瓣叶之间的接触面积更大,可以更好地贴合瓣叶,提高夹持辅助装置
40对瓣叶的支撑性。夹持辅助件44外形光滑,夹持辅助件44的远端可通过激光点焊等工艺形成光滑的圆头,没有毛刺、棱边或棱角等缺陷。可以理解,本技术不限定为夹持辅助件44为网状结构,在其他实施方式中,夹持辅助件44还可包括一根支撑杆或者由多根支撑杆构成的变形结构,变形结构为由多根支撑杆构成的开放式的分叉结构、伞状结构或者闭环结构,夹持辅助件44能够支撑在瓣叶下表面并与夹持装置10配合夹持瓣叶即可。
87.请再次参阅图9与图18,辅助操纵机构46设于推送手柄34。具体地,推送手柄34的第二壳体344内表面设有滑行槽3448(如图9所示),第一壳体342设有对应的操纵通槽3424。辅助操纵机构46包括滑行件462和设于滑行件462上的操纵件464。夹持辅助臂42的近端与滑行件462固定连接,滑行件462可在滑行槽3448沿轴向移动,操纵件464自操纵通槽3424露出并卡设在第一壳体342外表面。操纵通槽3424可以起到限制辅助操纵机构46沿轴向的移动距离的作用。操纵件464沿操纵通槽3424的轴向移动可带动滑行件462在滑行槽3448沿轴向移动,从而推动夹持辅助臂42带动夹持辅助件44自辅助臂收容腔328从辅助件出口321中穿出或将夹持辅助件44收回辅助臂收容腔328中。
88.进一步地,辅助操纵机构46还包括导轨466,导轨466设于滑行件462上,导轨466具有导轨槽,操纵件464可卡设于导轨槽沿径向移动。操纵通槽3424大致呈z字型,包括轴向通槽和连接轴向通槽两端的径向通槽。操纵通槽3424的径向通槽的设置,可供操纵件464沿径向移动,当操纵件464处于操纵通槽3424的径向通槽中,操纵件464无法带动滑行件462向轴向移动,从而在需要保持夹持辅助件44收容在辅助臂收容腔328中或夹持辅助件44从辅助件出口321中穿出的状态时,可避免操作者误操作而沿轴向移动操纵件464。
89.请参阅图21,推送导管32中沿轴向设有穿刺推杆通道322、夹持推杆通道324及探针通道326。夹持推杆12穿装于推送导管32的夹持推杆通道324中,穿刺推杆22穿装于推送导管32的穿刺推杆通道322中,探针52穿装于推送导管32的探针通道326中,以保证夹持推杆12、穿刺推杆22与探针52的轴向均与推送导管32的轴向大致平行。夹持推杆通道324设置于推送导管32的一侧,两个穿刺推杆通道322设置于推送导管32的另一侧。探针通道326设置在夹持推杆通道324与穿刺推杆通道322之间,且探针通道326与夹持推杆通道324之间的距离小于探针通道326与穿刺推杆通道322之间的距离。可以理解的是,当推送导管32中还设有辅助臂收容腔328时,辅助臂收容腔328设置在夹持推杆通道324与穿刺推杆通道322之间,探针通道326设置在夹持推杆通道324与辅助臂收容腔328之间,且探针通道326与夹持推杆通道324之间的距离小于探针通道326与穿刺推杆通道322之间的距离。
90.推送导管32可以采用一体成型的多腔管,也可以将外管和内管套装固定在一起形成整体结构的推送导管32。推送导管32可以采用生物相容性的高分子材料(例如,聚甲醛pom、聚乙烯pe、尼龙pa、聚氯乙烯pvc、丙烯腈-丁二烯-苯乙烯共聚物abs、尼龙弹性体pebax或者聚氨酯pu)、金属材料(例如,不锈钢或者镍钛合金)或者金属-高分子复合材料制成。
91.夹持操作机构18、辅助操纵机构46、探针操控机构54均设于推送手柄34,由远端至近端,依次为夹持操作机构18、辅助操纵机构46、探针操控机构。滑移件182开设有沿轴向的通孔,以供夹持辅助臂42、探针52、穿刺推杆22通过。滑行件462沿推送手柄34的中轴线的两侧分别设有沿轴向的通槽、通孔以供探针52、穿刺推杆22穿过。滑动件542沿径向朝向推送手柄34的中轴线设有支撑部5422(如图15所示),支撑部5422与支撑件346的高度相同,共同支撑穿刺推杆22和穿刺手柄26。
92.请再次参阅图8,推送装置30还包括连通推送导管32的密封管36,密封管36位于推送手柄34的内腔中并与推送导管32的近端连接,穿刺装置20、探针52、夹持推杆及夹持辅助臂均活动穿装在密封管36中。本实施方式中,密封管36设有鲁尔接头362以用于连接排气管(图未示)排气。密封管36位于第一壳体342和第二壳体344之间形成的内腔中,推送手柄34的远端侧面开设有安装孔3440,用于安装鲁尔接头362。密封管36的远端外表面形成有螺纹,与一带内螺纹的安装件38螺纹连接,从而使推送导管32与推送手柄34固定连接。
93.密封管36的远端与推送导管32的近端连通,密封管36的近端开口且填充至少一个密封件37,密封件37设有通孔(图未示)以供穿刺装置20、探针52、夹持推杆及夹持辅助臂穿过。本实施方式中,密封件37包括密封硅胶。密封件37通过与密封管36的近端螺纹连接的固定螺帽33固定。推送导管32沿轴向设置多个相互分隔的贯通的内腔或通道,对应地,密封件37也设有多个相互分隔的通孔。可以理解,本技术对密封件37的材质不作限定,对密封件37与密封管36的连接方式不作限定,例如,在其他实施方式中,可以通过胶体粘接也可以通过卡合等方式。
94.以下以二尖瓣后叶夹持的腱索植入术为例,对本实施方式提供的瓣膜缝合器100的实施过程进行简单说明。
95.第一步,请参见图22,先将瓣膜缝合器100推进至左心室内,继续推进瓣膜缝合器100直至远端夹头14及近端夹头16均位于左心房内。
96.第二步,请参见图23,控制操作件1841向远端移动以向远端推送夹持推杆12,使得近端夹头16与远端夹头14分离,此时近端夹头16与远端夹头14之间形成瓣叶容纳空间。
97.第三步,请参见图24,控制操纵件464向远端移动以驱动夹持辅助臂42推送夹持辅助件44从辅助件出口321中穿出,此时夹持辅助件44支撑在瓣叶下表面以协助稳定搏动的瓣叶,保持操作件1841和操纵件464之间的相对位置不变,向近端缓慢移动整个器械,直至瓣叶进入近端夹头16与远端夹头14之间形成的瓣叶容纳空间中,且夹持辅助件44可以对瓣叶提供一定的支撑力。
98.第四步,请请参见图25,轻微移动瓣膜缝合器100的远端,直至瓣叶边缘与夹持推杆12接触,此时向近端后撤操作件1841,驱动远端夹头14向近端夹头16移动直至二者闭合,瓣叶被夹持。如操作者发现瓣叶未被有效夹持,可以微调远端夹头14与近端夹头16的相对位置使得二者之间产生一定距离,再调整夹持推杆12与瓣叶之间的相对位置。在调整的过程中,由于瓣叶下方的夹持辅助装置40对瓣叶具有一定的支撑作用,可以防止瓣叶从夹持装置10中滑脱。
99.第五步,保持推送手柄34位置不变,分别控制两个操控件544向远端移动以驱动探针52沿推送导管32的轴向向远端移动;如图26a至图26c所示,如果瓣叶夹持状态较差,即,瓣叶没有完全覆盖近端夹头16的夹持面上的探针出口162,探针52的远端可以自探针出口162伸出后进入远端夹头14的探针收容腔146,需要重复第二步至第四步的操作重新夹持瓣叶;如图27所示,如果瓣叶夹持状态良好,即,瓣叶完全覆盖近端夹头16的夹持面上的探针出口162,探针52的远端不能自探针出口162伸出并进入远端夹头14的探针收容腔146,此时分别操作两个操控件544向近端移动至操控通槽3426的径向槽3428中以驱动探针52收回至推送导管32即可以进行后续操作。
100.第六步,如图28所示,按压保险件28的按压部282,解锁穿刺手柄26的锁定状态,此
时可向远端推送穿刺手柄26,驱动穿刺针头24向远端移动,直至穿刺针头24穿过瓣叶200并与缝合线60的固定件64之间形成固定连接,如图30所示。
101.第七步,参见图31和图32,后撤穿刺手柄26,使得穿刺针头24带动缝合线60的固定件64、与固定件64相连的缝合线主体62依次穿过瓣叶200。
102.第八步,继续后撤穿刺手柄26直至固定件64自推送手柄34的近端撤出,然后后撤操纵件464,带动夹持辅助件44回撤至辅助臂收容腔328中,撤出整个瓣膜缝合器100,并调整留在心脏内的缝合线主体62的长度,将缝合线主体62的两端分别固定在心室壁上,完成缝合线60植入(如图33所示)。
103.以上,仅是本技术的较佳实施方式而已,并非对本技术作任何形式上的限制。虽然本技术已以较佳实施方式揭露如上,然而并非用以限定本技术。任何熟悉本领域的技术人员,在不脱离本技术技术方案范围情况下,都可利用上述揭示的方法和技术内容对本技术技术方案做出许多可能的变动和修饰,或修改为等同变化的等效实施方式。因此,凡是未脱离本技术技术方案的内容,依据本技术的技术实质对以上实施方式所做的任何简单修改、等同变化及修饰,均仍属于本技术技术方案保护的范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。