技术特征:
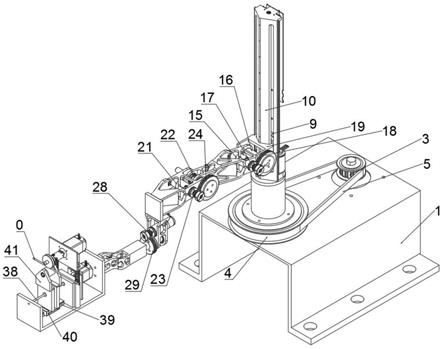
1.一种血管介入手术用导管牵引机器人,其特征在于,包括基座;所述基座的上部设置竖直向上延伸的转动臂,所述基座上设置有用来控制转动臂绕竖直轴转动的第一驱动组件;所述转动臂上沿竖直方向滑动配合有机械臂,所述转动臂上设置有用来控制机械臂进行竖直方向运动的第二驱动组件;所述机械臂的端部设置有导管牵引机械手,所述导管牵引机械手包括用来引导导管沿自身轴向运动的导管移动组件、用来引导导管沿自身轴线转动的导管转动组件。2.如权利要求1所述的血管介入手术用导管牵引机器人,其特征在于,所述第一驱动组件包括第一电机、小带轮、大带轮;所述第一电机固定设置在基座的底部,所述第一电机的输出轴向上穿过基座后与小带轮进行同轴固定连接;所述大带轮位于基座的上部且与基座进行转动配合;所述小带轮、大带轮之间通过同步带传动连接;所述大带轮的顶部与转动臂固定连接。3.如权利要求1所述的血管介入手术用导管牵引机器人,其特征在于,所述第二驱动组件包括升降丝杠、升降滑块、升降导轨;所述升降丝杠沿竖直方向延伸,所述升降丝杠的两端均与转动臂进行转动连接,所述升降丝杠的下部与用来控制升降丝杠转动的升降驱动组件相连;所述升降驱动组件设置在转动臂上;所述升降导轨固定设置在转动臂上且沿竖直方向延伸;所述升降滑块与升降导轨进行竖直方向的滑动配合;所述升降滑块上设置有与升降丝杠进行螺纹配合的升降丝母;所述升降滑块与机械臂的一端固定连接。4.如权利要求1所述的血管介入手术用导管牵引机器人,其特征在于,所述机械臂包括连接架、第一关节臂、第二关节臂、第三关节臂、第四连接臂;所述连接架与升降滑块固定连接;所述第一关节臂的一端与连接架通过第一铰接轴相铰接、另一端与第二关节臂的一端通过第二铰接轴相铰接,所述第二关节臂的另一端与第三关节臂的一端相固接,所述第三关节臂的另一端与第四关节臂的一端通过第三铰接轴相铰接;所述第四关节臂的另一端与导管牵引机械手相连;所述第一铰接轴、第二铰接轴相平行且与升降丝杠相垂直;所述第三铰接轴与第一铰接轴相垂直。5.如权利要求4所述的血管介入手术用导管牵引机器人,其特征在于,所述第一关节臂、连接架之间设置有用来控制第一关节臂绕第一铰接轴转动的第一折弯驱动件;所述第二关节臂、第一关节臂之间设置有用来控制第二关节臂绕第二铰接轴转动的第二折弯驱动件;所述第四关节臂、第三关节臂之间设置有用来控制第四关节臂绕第三铰接轴转动的第三折弯驱动件。6.如权利要求5所述的血管介入手术用导管牵引机器人,其特征在于,所述第一铰接轴
固定设置在连接架上,所述第一关节臂的一端与第一铰接轴进行铰接连接;所述第一折弯驱动件包括第三电机、第一主动齿轮、第一固定齿轮;所述第三电机固定设置在第一关节臂上,所述第一主动齿轮同轴固定在第三电机的输出轴端部;所述第一固定齿轮同轴固定在第一铰接轴的端部;所述第一主动齿轮、第一固定齿轮进行啮合连接。7.如权利要求5所述的血管介入手术用导管牵引机器人,其特征在于,所述第二铰接轴固定设置在第一关节臂上,所述第二关节臂的一端与第二铰接轴进行铰接连接;所述第二折弯驱动件包括第四电机、第二主动齿轮、第二固定齿轮;所述第四电机固定设置在第二关节臂上,所述第二主动齿轮同轴固定在第四电机的输出轴端部;所述第二固定齿轮同轴固定在第二铰接轴的端部;所述第二主动齿轮、第二固定齿轮进行啮合连接。8.如权利要求5所述的血管介入手术用导管牵引机器人,其特征在于,所述第三铰接轴固定设置在第四关节臂的一端,所述第三关节臂与第三铰接轴进行铰接连接;所述第三折弯驱动件包括第五电机、第三主动齿轮、从动齿轮;所述第五电机固定设置在第三关节臂上,所述第三主动齿轮同轴固定在第五电机的输出轴端部;所述从动齿轮同轴固定在第三铰接轴上;所述第三主动齿轮、从动齿轮进行啮合连接。9.如权利要求4所述的血管介入手术用导管牵引机器人,其特征在于,所述导管牵引机械手包括机械手底座,所述机械手底座的一端与第四关节臂固定连接;所述导管移动组件包括第六电机、凹轮、滚轮;所述第六电机固定设置在电机支撑架上,所述电机支撑架的底端与机械手底座固定连接;所述第六电机的输出轴通过联轴器与凹轮进行同轴固定连接;所述凹轮的径向外端面上设置环形凹槽,所述滚轮通过滚轮支撑架支撑在凹轮的下方;所述环形凹槽与滚轮之间形成滚动输送导管的区域;所述导管转动组件包括第七电机、丝杠、导轨;所述第七电机固定设置在机械手底座上;所述第七电机的输出轴与丝杠的一端进行同轴固定连接,所述丝杠的另一端与机械手底座进行转动连接;所述电机支撑架上设置有供丝杠穿过的通孔,所述滚轮支撑架上设置有用来与丝杠进行螺纹配合的丝母;所述导轨固定设置在机械手底座上且沿丝杠的轴线方向延伸,所述滚轮支撑架的底部设置有用来与导轨进行滑动配合的滑块;所述凹轮的中心轴线、滚轮的中心轴线、丝杠的中心轴线、第三铰接轴的中心轴线相平行。10.如权利要求9所述的血管介入手术用导管牵引机器人,其特征在于,所述电机支撑架包括下支架以及用来固定设置第六电机的上支架;所述下支架固定设置在机械手底座上,所述下支架的顶部设置有两根向上延伸的支撑柱;所述上支架上设置有两个用来与相应支撑柱进行滑动配合的滑动孔;所述支撑柱的顶端螺纹配合有螺母;所述下支架、上支架之间的支撑柱上套有拉伸弹簧,所述拉伸弹簧的两端分别与下支
架、上支架固定连接。
技术总结
本发明公开了一种血管介入手术用导管牵引机器人,包括基座;基座的上部设置转动臂,基座上设置用来控制转动臂绕竖直轴转动的第一驱动组件;转动臂上沿竖直方向滑动配合有机械臂,转动臂上设置有用来控制机械臂进行竖直方向运动的第二驱动组件;机械臂的端部设置导管牵引机械手,导管牵引机械手包括用来引导导管沿自身轴向运动的导管移动组件、用来引导导管沿自身轴线转动的导管转动组件。本发明中转动臂、机械臂、导管牵引机械手协同作用,最终能够实现导管的空间运动、空间定位以及空中姿态的调节,从而将导管准确的牵引至治疗位置,进而能够代替医护人员人工牵引导管,避免了辐射对医护人员的伤害以及人工牵引操作不稳定对手术的影响。术的影响。术的影响。
技术研发人员:田和强 马洪强 刘军强 庞博 安金昌 孟德宝 田斌 张明辉 石侃 张海强 陈修龙 姚燕安
受保护的技术使用者:山东科技大学
技术研发日:2021.11.16
技术公布日:2022/3/15
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。