1.本发明涉及辅助机器人技术领域,具体为一种养老院用的药品物资配送机器人。
背景技术:
2.药品物资配送机器人是一种能够半自主或全自主工作的智能机器,能够实现自主药品配送,减少人力资源占用,在养老院中的老人由于身体机能的衰老,身体状况较差,通常需要定时服药来治愈疾病或保健身体,如此便为护理人员增加了大量工作量,随着科技发展,为了减少护理人员的工作量,通常使用药品物资配送机器人进行药物配送。
3.传统的药物配送机器人在配送到目的地药物后,需要老人自主取药,对于一些卧床或者身体不便的老人来说,显得极为不便,无法根据老人所处的位置进行定位送药。鉴于此,我们提出一种养老院用的药品物资配送机器人。
技术实现要素:
4.本发明的目的在于提供一种养老院用的药品物资配送机器人,以解决上述背景技术中提出的问题。
5.为实现上述目的,本发明提供如下技术方案:一种养老院用的药品物资配送机器人,包括驱动控制主机和一次性药盒,所述驱动控制主机的下表面靠近四角位置均分别固定安装有电控驱动轮,所述驱动控制主机的上表面靠近后表面位置固定安装有储药面板,所述储药面板的前表面位置开设有储药开槽,所述一次性药盒位于储药开槽内部,所述驱动控制主机的上方活动安装有移药传送带,所述驱动控制主机的上表面设置有电控位移机构,所述移药传送带通过电控位移机构与驱动控制主机的配合安装,所述储药开槽的内部设置有具有拆卸功能的药盒支撑架机构,所述驱动控制主机的上表面靠近前表面两侧位置均分别设置有多级身份识别结构。
6.优选的,所述电控位移机构包括均分别固定安装在驱动控制主机的上表面靠近两侧表面位置的光杆固定座,且两块光杆固定座之间固定安装有水平光杆,所述驱动控制主机的上表面靠近两侧表面位置均分别固定安装有丝杆固定座。
7.优选的,两块所述丝杆固定座之间转动安装有水平丝杆,所述丝杆固定座的一侧表面位置固定安装有水平电机,所述水平电机的旋转轴穿过丝杆固定座与水平丝杆固定连接。
8.优选的,所述水平光杆与所述水平丝杆的外表面位置均套设安装有水平滑块,所述水平滑块的一侧表面位置固定安装有支撑边块,所述支撑边块的上表面位置固定安装有竖直光杆,所述支撑边块的上表面位置转动安装有竖直丝杆,所述竖直光杆的上端表面位置固定安装有端部固定块。
9.优选的,所述端部固定块的上表面位置固定安装有竖直电机,所述竖直电机的旋转轴穿插经过端部固定块与竖直丝杆固定连接,所述竖直光杆与所述竖直丝杆的外表面位置均套设安装有竖直滑块,且竖直滑块的一侧表面位置固定安装有支撑滑块,所述移药传
送带的一侧表面位置开设有侧边支撑槽,所述支撑滑块位于侧边支撑槽内部,所述竖直滑块的前表面位置固定安装有伸缩电机,所述伸缩电机的旋转轴端面固定安装有伸缩驱动丝杆,所述移药传送带的一侧表面位置固定安装有伸缩滑块,所述伸缩驱动丝杆穿插经过伸缩滑块,且与之螺旋配合,所述伸缩驱动丝杆的端面固定安装有端部限位块。
10.优选的,所述药盒支撑架机构包括均分别固定安装在储药开槽内壁两侧表面位置的轨道凸棱,且轨道凸棱之间穿插设有限位卡边,所述限位卡边的一侧表面位置固定安装有药盒侧板,所述药盒侧板的一侧表面靠近下表面位置固定安装有药盒支撑板,所述药盒支撑板的前表面位置固定安装有前部挡板。
11.优选的,所述药盒侧板的前表面位置固定安装有支撑框拉块,两块所述药盒侧板的后表面位置通过板块固定连接,所述支撑框拉块的一侧表面位置固定安装有固定短轴,所述固定短轴的外表面位置套设安装有活动拉板,两块所述活动拉板之间固定安装有活动拉杆。
12.优选的,所述多级身份识别结构包括固定安装在驱动控制主机的上表面靠近前表面两侧位置的高度支撑竖板,所述高度支撑竖板的外表面位置固定安装有身份识别感应板,所述身份识别感应板竖直阵列式排列。
13.优选的,所述驱动控制主机的四周表面位置均分别嵌设安装有探测传感器,所述驱动控制主机的两侧表面位置开设有散热窗口,所述驱动控制主机的一侧表面位置开设有主机充电口,所述驱动控制主机的前表面位置开设有数据交互口。
14.与现有技术相比,本发明的有益效果是:
15.通过设置的多级身份识别结构,能够感应到养老院老人刷身份识别卡的高度和两侧位置,从而能够将药物送到对应的高度位置,方便老人拿取,能够使得卧床或者站立的老人均可以直接便捷的取药,减少了老人取药的移动幅度。
16.通过设置的药盒支撑架机构能够将一次性药盒支撑放置,并能够通过活动拉杆拉出拆卸,方便安放一次性药盒,且能通过移药传送带和电控位移机构便捷的将一次性药盒取出,根据多级身份识别结构接收的高度信息将一次性药盒运送到指定高度,从而使得药品物资配送机器人在老人取药时更为便捷,避免大幅活动,且便于护理人员安放药品,提高了医护人员工作效率。
附图说明
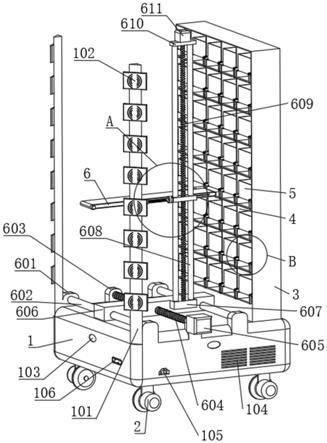
17.图1为本发明整体结构的示意图;
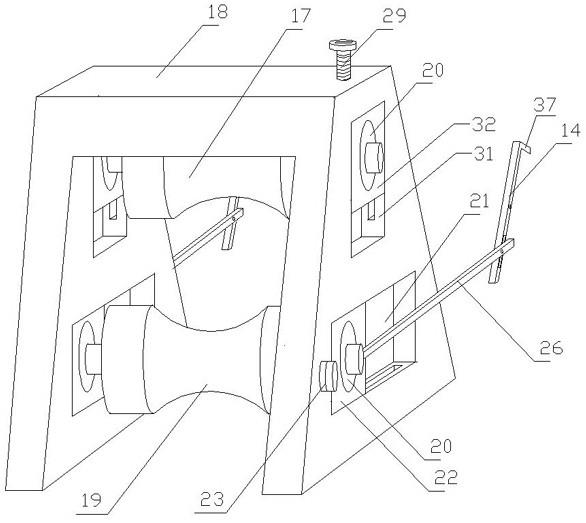
18.图2为图1中a处放大图;
19.图3为图1中b处放大图;
20.图4为本发明整体结构的示意图;
21.图5为本发明主视图;
22.图6为本发明侧视图。
23.图中:1、驱动控制主机;2、电控驱动轮;3、储药面板;4、储药开槽;5、一次性药盒;6、移药传送带;401、轨道凸棱;402、限位卡边;403、药盒侧板;404、药盒支撑板;405、前部挡板;406、支撑框拉块;407、固定短轴;408、活动拉板;409、活动拉杆;601、光杆固定座;602、水平光杆;603、丝杆固定座;604、水平丝杆;605、水平电机;606、水平滑块;607、支撑边块;
608、竖直光杆;609、竖直丝杆;610、端部固定块;611、竖直电机;612、竖直滑块;613、侧边支撑槽;614、伸缩电机;615、伸缩驱动丝杆;616、伸缩滑块;617、端部限位块;101、高度支撑竖板;102、身份识别感应板;103、探测传感器;104、散热窗口;105、主机充电口;106、数据交互口。
具体实施方式
24.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
25.请参阅图1至图6,本发明提供一种技术方案:一种养老院用的药品物资配送机器人,包括驱动控制主机1和一次性药盒5,驱动控制主机1由控制芯片和驱动电源等原件构成,能够根据电脑编程自主行走,且接收探测传感器103的反馈信号进行实时避障,驱动控制主机1内部集成伺服驱动器等原件,电控位移机构中的伺服驱动电机由驱动控制主机1内部芯片控制,上述皆为现有技术,其技术领域内所属人均可以实现上述功能,驱动控制主机1的下表面靠近四角位置均分别固定安装有电控驱动轮2,驱动控制主机1的上表面靠近后表面位置固定安装有储药面板3,储药面板3的前表面位置开设有储药开槽4,一次性药盒5位于储药开槽4内部,一次性药盒5为一次性用品,其由无菌纸张制成,呈方盒状,上部开口,驱动控制主机1的上方活动安装有移药传送带6,驱动控制主机1的上表面设置有电控位移机构,移药传送带6通过电控位移机构与驱动控制主机1的配合安装,储药开槽4的内部设置有具有拆卸功能的药盒支撑架机构,驱动控制主机1的上表面靠近前表面两侧位置均分别设置有多级身份识别结构。
26.电控位移机构包括均分别固定安装在驱动控制主机1的上表面靠近两侧表面位置的光杆固定座601,且两块光杆固定座601之间固定安装有水平光杆602,驱动控制主机1的上表面靠近两侧表面位置均分别固定安装有丝杆固定座603;两块丝杆固定座603之间转动安装有水平丝杆604,丝杆固定座603的一侧表面位置固定安装有水平电机605,水平电机605的旋转轴穿过丝杆固定座603与水平丝杆604固定连接;水平光杆602与水平丝杆604的外表面位置均套设安装有水平滑块606,水平滑块606的一侧表面位置固定安装有支撑边块607,支撑边块607的上表面位置固定安装有竖直光杆608,支撑边块607的上表面位置转动安装有竖直丝杆609,竖直光杆608的上端表面位置固定安装有端部固定块610;端部固定块610的上表面位置固定安装有竖直电机611,竖直电机611的旋转轴穿插经过端部固定块610与竖直丝杆609固定连接,竖直光杆608与竖直丝杆609的外表面位置均套设安装有竖直滑块612,且竖直滑块612的一侧表面位置固定安装有支撑滑块,移药传送带6的一侧表面位置开设有侧边支撑槽613,支撑滑块位于侧边支撑槽613内部,竖直滑块612的前表面位置固定安装有伸缩电机614,伸缩电机614的旋转轴端面固定安装有伸缩驱动丝杆615,移药传送带6的一侧表面位置固定安装有伸缩滑块616,伸缩驱动丝杆615穿插经过伸缩滑块616,且与之螺旋配合,伸缩驱动丝杆615的端面固定安装有端部限位块617,端部限位块617能够避免伸缩驱动丝杆615极限位脱落。
27.药盒支撑架机构包括均分别固定安装在储药开槽4内壁两侧表面位置的轨道凸棱
401,且轨道凸棱401之间穿插设有限位卡边402,限位卡边402的一侧表面位置固定安装有药盒侧板403,药盒侧板403的一侧表面靠近下表面位置固定安装有药盒支撑板404,药盒支撑板404的前表面位置固定安装有前部挡板405;药盒侧板403的前表面位置固定安装有支撑框拉块406,两块药盒侧板403的后表面位置通过板块固定连接,上述板块能够将两药盒侧板403连接成一体状态,方便取出拆卸,支撑框拉块406的一侧表面位置固定安装有固定短轴407,固定短轴407的外表面位置套设安装有活动拉板408,两块活动拉板408之间固定安装有活动拉杆409。
28.多级身份识别结构包括固定安装在驱动控制主机1的上表面靠近前表面两侧位置的高度支撑竖板101,高度支撑竖板101的外表面位置固定安装有身份识别感应板102,身份识别感应板102竖直阵列式排列,身份识别感应板102配套有身份卡,身份卡交由对应的老人所有,能够感应识别老人身份。
29.驱动控制主机1的四周表面位置均分别嵌设安装有探测传感器103,探测传感器103可以采用超声波雷达,视觉等多种传感器,其能够指导驱动控制主机1进行避障,避免发生撞击,驱动控制主机1的两侧表面位置开设有散热窗口104,驱动控制主机1的一侧表面位置开设有主机充电口105,驱动控制主机1的前表面位置开设有数据交互口106,通过数据交互口106连接外界电脑,能够对老人身份信息和对应的储药开槽4等控制逻辑进行编程或更改。
30.工作原理:本发明药品物资配送机器人,在使用时,首先护理人员统一往一次性药盒5中配置药物,然后拉住活动拉杆409,将药盒侧板403结构拉出,将配置好药物的一次性药盒5放置在药盒支撑板404上方两药盒侧板403之间,使其承托住,然后按身份信息放置入对应的储药开槽4中,使得药盒侧板403侧边的限位卡边402插入到轨道凸棱401之间之间,从而实现固定,药品物资配送机器人通过驱动控制主机1和电控驱动轮2驱动行走进行药物配送,到达目的地后,提示老人刷身份识别卡,老人可以根据目前身体所处高度,刷对应位置的身份识别感应板102,身份识别感应板102感应老人身份信息后,通过电控位移机构驱动,将移药传送带6插入到对应身份信息的储药开槽4中,使得移药传送带6位于一次性药盒5的下方,然后电控位移机构驱动移药传送带6上移一定高度,使得移药传送带6将一次性药盒5托起,然后移药传送带6运行,将一次性药盒5传送出储药开槽4,传送到移药传送带6上表面靠近前表面位置停住,接着电控位移机构将移药传送带6运行到老人刷卡位置和高度,使得老人能够便捷取药,能够在卧床时无需起身,在站立时无需弯腰,减少老人的活动幅度。
31.尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。