1.本发明属于自动化码头技术领域,具体地说,是涉及一种自动化码头集装箱装卸系统及装卸方法。
背景技术:
2.自动化码头的堆场布局一般分为两种方式,一种是水平布局,堆场箱区与码头岸壁平行排列,集装箱在堆场的摆放方向与船舶积载方向相同;一种是垂直布局,堆场箱区与码头岸壁垂直排列,集装箱在堆场的摆放方向与船舶积载方向垂直。
3.水平布局的优点是采用低速堆场设备,单台设备作业效率高,缺点是无法实现全自动化作业,无法解决内外水平运输设备交叉问题。垂直布局的优点是将内外水平运输设备隔离,实现堆场全封闭自动化作业,缺点是设备配备数量多。两种布局方式共有的缺点是土地利用率低,堆场翻倒率高,单箱作业能耗高。
4.可见,两种布局方式各有利弊,不能适应自动化码头低能耗、高作业效率的需求。
技术实现要素:
5.为解决上述技术问题,本发明提供一种自动化码头集装箱装卸系统及装卸方法,采用立体式集装箱堆场设计,桥吊通过梭车与堆垛机交互实现海侧集装箱装卸,外集卡通过堆垛机交互实现陆侧集装箱集疏运,解决了集装箱传统堆场土地利用率低和翻倒率高的问题,减少了水平运输从而省去了水平运输设备的投资。
6.本发明采用以下技术方案予以实现:提出一种自动化码头集装箱装卸系统,包括:桥吊作业区,其沿码头岸壁布设有桥吊,所述桥吊在装船作业中将集装箱吊装入船,在卸船作业中将船上集装箱吊放至立体式集装箱堆场;所述立体式集装箱堆场,布设于所述桥吊作业区的陆侧,由多列集装箱单元构成,且其海侧端位于桥吊的大梁后伸距范围内;其中,每列集装箱单元均为由框架结构形成的n行m列集装箱单元格构成;相邻两列集装箱单元之间布设堆垛机巷道;陆侧作业区,供陆侧水平运输设备与所述立体式集装箱堆场交互;堆垛机,设置于所述堆垛机巷道内,负责所在堆垛机巷道两侧的集装箱单元的集装箱单元格内的集装箱取放;梭车,设置于梭车轨道上,负责与桥吊和堆垛机交互集装箱;所述梭车轨道布设于所述立体式集装箱堆场的顶部,并位于桥吊的大梁后伸距范围内。
7.进一步的,所述梭车轨道包括:横向轨道,平行于码头岸壁;纵向轨道,垂直与码头岸壁并与所述堆垛机巷道对应;所述横向轨道与所述纵向轨道交叉处连通。
8.进一步的,所述陆侧作业区布设于所述立体式集装箱堆场的最外层集装箱单元的边侧。
9.进一步的,所述立体式集装箱堆场的顶部划分出所述梭车与所述堆垛机的交互区
域。
10.进一步的,所述堆垛机包括:大车框架;大车滑轮,安装于所述大车框架的端部,安装在所述堆垛机巷道内布设的巷道轨道内;驱动装置,负责驱动所述大车框架在所述巷道轨道内运行;起升机构,通过起升滑轮安装于所述大车框架的滑轮轨道内,负责吊具在垂直地面方向上的起升;所述吊具,可相对所述起升机构在平行地面方向上移动,负责与集装箱单元格交互拿取或放下集装箱。
11.提出一种自动化码头集装箱装卸方法,应用于如上所述的自动化码头集装箱装卸系统,包括:控制桥吊从船舶的目标贝位上取箱;控制梭车沿所述梭车轨道运行至桥吊下方与桥吊交互取箱;控制梭车沿所述梭车轨道运行至目标交互区;控制堆垛机运行至所述目标交互区与所述梭车锁定,并从所述梭车上取箱;控制堆垛机将集装箱放至目标集装箱单元格内。
12.提出一种自动化码头集装箱装卸方法,应用于如上所述的自动化码头集装箱装卸系统,包括:控制堆垛机至目标集装箱单元格取箱;控制堆垛机带箱运行至目标交互区;控制梭车沿梭车轨道运行至所述目标交互区与所述堆垛机锁定;控制堆垛机放箱至所述梭车;控制所述梭车带箱运行至桥吊下方与桥吊交互;控制桥吊将集装箱调取至船舶的目标贝位。
13.提出一种自动化码头集装箱装卸方法,应用于如上所述的自动化码头集装箱装卸系统,包括:在外集卡达到所述立体式集装箱堆场陆侧作业区后,向堆垛机发送指令;堆垛机运行至所述陆侧交互区从外集卡上取箱;堆垛机带箱运行至目标集装箱单元格放箱。
14.提出一种自动化码头集装箱装卸方法,应用于如上所述的自动化码头集装箱装卸系统,包括:在外集卡达到所述立体式集装箱堆场陆侧作业区后,向堆垛机发送指令;堆垛机运行至目标集装箱单元格取箱;堆垛机带箱运行至所述陆侧交互区向外集卡放箱。
15.与现有技术相比,本发明的优点和积极效果是:本发明提出的自动化码头集装箱装卸系统及装卸方法中,系统由桥吊作业区、立体式集装箱堆场和陆侧作业区构成,立体式集装箱堆场布设于桥吊作业区的陆侧,由多列集装箱单元构成,且其海侧端位于桥吊的大梁后伸距范围内,每列集装箱单元均为由框架结构形成的n行m列集装箱单元格构成,相邻两列集装箱单元之间布设堆垛机巷道,堆垛机巷道内设置堆垛机,堆垛机负责从各集装箱单元格取箱或向各集装箱单元格放箱;在立体式集装箱堆场顶部布设运行梭车的梭车轨道,桥吊可与梭车直接交互取箱或放箱,堆垛机则与梭车交互实现交箱或收箱,基于上述本发明提出的装卸系统,桥吊可通过梭车与堆垛机与集装箱堆场直接交互实现取箱或放箱,
外集卡则通过堆垛机与集装箱堆场直接交互实现取箱或放箱,省去了海侧交互区和海侧水平运输设备,从而降低了堆场土地利用率,并减少了码头设备的成本投入,框架式的集装箱单元格结构下,堆垛机每次收箱或放箱的控制更精准且将集装箱的翻倒率降为零,并解决了堆场设备与集装箱的防风问题。
16.结合附图阅读本发明实施方式的详细描述后,本发明的其他特点和优点将变得更加清楚。
附图说明
17.图1 为本发明提出的自动化码头集装箱装卸系统的系统俯视结构图;图2为本发明提出的立体式集装箱堆场的系统俯视结构图;图3为本发明提出的立体式集装箱堆场的侧面剖视图;图4为本发明提出的堆垛机的结构示意图;图5为本发明提出的立体式集装箱堆场的侧面剖视图;图6为本发明实施例中堆垛机的工作示意图之一;图7为本发明实施例中堆垛机的工作示意图之二;图8为本发明实施例中堆垛机的工作示意图之三。
具体实施方式
18.下面结合附图对本发明的具体实施方式作进一步详细的说明。
19.本发明旨在提出一种自动化码头集装箱装卸系统及其装卸方法,采用立体式集装箱堆场设计,桥吊通过梭车与堆垛机交互实现海侧集装箱装卸,外集卡通过堆垛机交互实现陆侧集装箱集疏运,解决集装箱传统堆场土地利用率低和翻倒率高的问题,减少了水平运输从而省去了水平运输设备的投资。
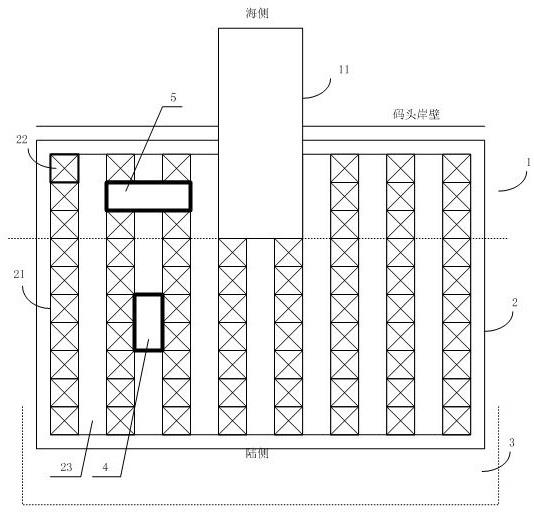
20.具体的,如图1所示,本发明提出的自动化码头集装箱装卸系统,包括:桥吊作业区1,其沿码头岸壁布设有桥吊11,桥吊11在装船作业中将集装箱吊装入船,在卸船作业中将船上集装箱吊放至立体式集装箱堆场2。
21.立体式集装箱堆场2,布设于桥吊作业区1的陆侧,由多列集装箱单21元构成,且其海侧端位于桥吊的大梁后伸距范围内;其中,每列集装箱单元21均为由框架结构形成的n行m列集装箱单元格22构成;相邻两列集装箱单元之间布设堆垛机巷道23。
22.陆侧作业区3,供陆侧水平运输设备与立体式集装箱堆场2交互。
23.堆垛机4,设置于堆垛机巷道23内,负责所在堆垛机巷道两侧的集装箱单元的集装箱单元格内的集装箱取放。
24.梭车5,设置于梭车轨道上,负责与桥吊11和堆垛机4交互集装箱;梭车轨道布设于立体式集装箱堆场2的顶部,并位于桥吊的大梁后伸距范围内。
25.基于上述本发明提出的装卸系统,桥吊可通过梭车与堆垛机与集装箱堆场直接交互实现取箱或放箱,外集卡则通过堆垛机与集装箱堆场直接交互实现取箱或放箱,省去了海侧交互区和海侧水平运输设备,从而降低了堆场土地利用率,并减少了码头设备的成本投入,框架式的集装箱单元格结构下,堆垛机每次收箱或放箱的控制更精准且将集装箱的翻倒率降为零,并解决了堆场设备与集装箱的防风问题。
26.如图2所示的实施例中,梭车轨道包括横向轨道51和纵向轨道52,横向轨道51平行于码头岸壁;纵向轨道52垂直与码头岸壁并与堆垛机巷道23对应;横向轨道51与纵向轨道52交叉处连通,梭车5可通过横向轨道51与纵向轨道52之间实现转向和精准对位。
27.当然本发明不具体限定梭车轨道的具体结构,实现梭车5在立体式集装箱堆场2顶部的定点运行的结构均在本发明保护范围内。
28.为了实现梭车5与堆垛机4交互时的精准对位,在立体式集装箱堆场2的顶部划分出梭车5与堆垛机4的交互区域,在二者需要交互时,梭车5与堆垛机4均运行至交互区域实现对接。
29.在本发明提出的装卸系统下,桥吊与立体式集装箱堆场在立体式集装箱堆场顶部、桥吊大梁后伸距下交互,不再需要agv、igv、跨运车等水平运输设备,利用梭车完成集装箱在桥吊与堆垛机之间的短距离运输,且不再需要轨道吊等堆场设备,集装箱的存放在框架式的集装箱单元格中存放,利用堆垛机实现集装箱的存取和搬运。
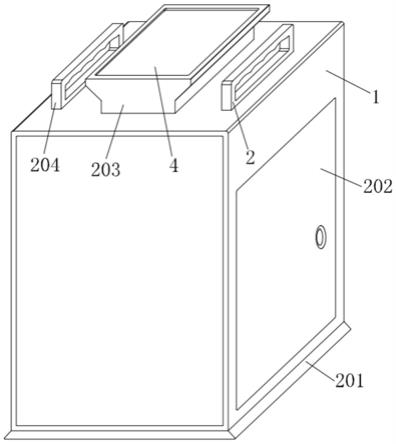
30.在本发明提出的装卸系统架构下,陆侧作业区3的设置范围更大,不仅限于堆场陆侧端,还可以设置于立体式集装箱堆场的最外层集装箱单元的边侧,如图3所示,从而能够增大陆侧集卡作业范围,降低外集卡车流交叉概率,提高外集卡作业效率如图4所示的实施例,本发明提出的堆垛机4由大车框架41、大车滑轮42、驱动装置43、起升机构44和吊具45组成,其中,大车滑轮42安装于大车框架41的端部,安装在堆垛机巷道内布设的巷道轨道47内,如图5所示;驱动装置43负责驱动大车框架41在巷道轨道内47运行;起升机构44通过起升滑轮46安装于大车框架41的滑轮轨道内,负责吊具45在垂直地面方向上的起升。
31.吊具45可相对起升机构44在平行地面方向上移动,负责与集装箱单元格交互拿取或放下集装箱,当堆垛机4在堆垛机巷道23内运行时、堆垛机4停止、起升机构44运行时,呈图6所示状态,当堆垛机4在集装箱单元格取放箱时,呈图7和图8所示状态。
32.针对上述提出的自动化码头集装箱装卸系统,本发明在以下内容中,提出其实现船舶装卸作业以及陆侧集疏运作业的装卸方法。
33.一、进口卸船作业包括如下步骤:1、桥吊接收系统指令,从船舶的目标贝位上抓取集装箱。
34.2、立体式集装箱堆场顶部的梭车控制系统接收指令,调派梭车沿梭车轨道运行至桥吊后伸距下方。
35.3、桥吊与梭车交互放箱。
36.具体的,桥吊主小车放箱至桥吊的中转平台,ocr识别箱信息,拆锁机器人完成拆锁,进而门架小车至中转平台抓箱,与梭车完成锁定后放箱至梭车。
37.4、梭车控制系统控制梭车沿梭车轨道运行至目标交互区。
38.5、堆垛机控制系统控制堆垛机运行至目标交互区。
39.6、梭车与堆垛机实施锁定,堆垛机从梭车上取箱,并起升至安全高度,解除与梭车的锁定。
40.梭车可继续接收系统的其他调度。
41.7、堆垛机运行至目标集装箱单元格,放箱,作业完成。
42.二、出口装船作业包括如下步骤:1、堆垛机控制系统接收指令,控制堆垛机运行至目标集装箱单元格取箱。
43.2、堆垛机控制系统控制堆垛机运行至目标交互区。
44.3、梭车控制系统控制梭车运行至目标交互区。
45.4、梭车与堆垛机实施锁定。
46.5、堆垛机放箱至梭车,起升至安全高度,解除锁定。
47.6、梭车控制系统控制梭车带箱运行至桥吊后伸距下方。
48.7、桥吊与梭车交互抓箱。
49.具体的,桥吊门架小车与梭车锁定,从梭车抓箱至中转平台,在中转平台完成加锁和ocr箱信息识别,主小车运行至中转平台抓箱。
50.8、控制桥吊将集装箱调取至船舶的目标贝位。
51.三、出口发箱作业包括以下步骤:1、外集卡达到立体式集装箱堆场的陆侧作业区,ocr识别车号后,码头操作系统给堆垛机控制系统发送指令。
52.2、堆垛机控制系统控制堆垛机运行至陆侧作业区从外集卡上取箱。
53.3、控制堆垛机带箱运行至目标集装箱单元格放箱。
54.4、外集卡出闸。
55.四 、进口收箱作业包括以下步骤:1、外集卡达到立体式集装箱堆场的陆侧作业区,ocr识别车号后,码头操作系统给堆垛机控制系统发送指令。
56.2、堆垛机控制系统控制堆垛机运行至目标集装箱单元格取箱。
57.3、控制堆垛机运行陆侧作业区与集卡交互实施放箱。
58.4、外集卡出闸。
59.上述本发明提出的自动化码头集装箱装卸系统,集装箱单元格按箱型长度分为20英尺、40英尺、45英尺,高度约为4米,满足普箱、超高箱的堆放;同一堆垛机巷道内,根据立体式集装箱堆场的高度和纵深,可配置1台或多台堆垛机,这种框架式的立体式集装箱堆放结构,不仅降低了土地利用率,还将集装箱翻倒率降低至零,同时还解决堆场防风问题。
60.应该指出的是,上述说明并非是对本发明的限制,本发明也并不仅限于上述举例,本技术领域的普通技术人员在本发明的实质范围内所做出的变化、改型、添加或替换,也应属于本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。