1.本发明属于电动执行机构在线故障诊断技术领域,具体为一种基于信号分解的燃气轮机电动执行机构故障诊断方法。
背景技术:
2.近年来,随着新型工业化进程的复杂化和智能化,工业控制系统往往具有非线性和不确定性的特点。执行机构是控制系统中最为重要的组成部分,能够精确的使调节阀的阀门走到任何位置。调节阀作为整个控制系统的执行终端部件,对控制系统品质的优劣具有很大的影响;但由于使用环境较为恶劣,执行机构尤其是调节阀容易出现多种故障。据统计,调节阀的故障占到控制系统总故障的三分之一以上。因此对执行机构故障诊断技术进行研究,提高故障诊断的准确率,对于保障控制过程安全稳定地运行具有重要意义。
3.为了有效提取故障信息,使诊断精度更高,对原始信号进行分解是必要的。传统的分解方法如经验模态分解(emd),面临分解层数多、分解效率较低和模态混淆等问题,由于希尔伯特黄变换(hht)以经验模态分解为基础,因此会出现上述问题。变分模态分解(vmd)由于其坚实的数学基础与自适应分解的优点,可以有效提高分解效率与抑制模态混淆问题。将其与希尔伯特变换相结合,形成改进变分模态分解(vht)方法,再利用t分布随机邻域嵌入算法(t-sne)二次降维并可视化,最后通过k-means聚类完成诊断。本方法可以提高诊断准确率,且使诊断结果更直观的显现出来。目前该方法尚未广泛应用于电动执行机构故障诊断。
技术实现要素:
4.针对背景技术中存在的问题,本发明提供了一种基于信号分解的燃气轮机电动执行机构故障诊断方法,其特征在于,包括:
5.步骤1、采集设备正常与故障数据作为原始数据,并计算当前的阀前阀后流量:
6.给定开度下测量得到的伺服阀缸体输出流量q与阀口流量q,计算得到阀前后流量差δq作为输入信号;
7.步骤2、对原始流量数据进行变分模态分解,即依次进行变分问题构造与变分问题求解;得到k个模态分量;
8.步骤3:将经变分模态分解得到的各模态分量分别进行第二次希尔伯特变换,参照经验设置第二次希尔伯特变换的参数,进行运算;并提取各模态分量的频域特征量进行组合得到原始流量信号的特征量;
9.步骤4:构造高维特征矩阵,将数据分组进行vht变换,同一种情况分为10组,将10组结果按顺序并列成高维输出矩阵,作为下一步的输入;
10.步骤5:将步骤4的结果送入t分布随机邻域嵌入算法中进行降维可视化,对数据二次处理;得到分类结果的可视化图像,并输出二维特征矩阵用作最终分类;t分布随机邻域嵌入算法具体为设置算法参数,对步骤4得到的高维特征矩阵进行二次降维、提取;
11.步骤6:将步骤5得到的二维特征矩阵送入k-means分类器中进行聚类,完成对经t-sne二次降维提取后的故障信号进行分类辨识,得到故障诊断结果。
12.所述步骤1具体为:
13.步骤11、计算伺服阀缸体流量:
[0014][0015]
式中,q为缸体输出流量,单位为m3/s;a1为活塞直径,单位为m;a2为活塞杆直径,单位为m;δt为活塞的相对速度,单位为m/s;δ为经验误差值,单位为m3/s;
[0016]
步骤12、计算伺服阀阀口流量:
[0017][0018]
式中,q为伺服阀阀口流量,单位为m3/s;τ为经验系数;y为阀芯运动位移,单位为m;δp为阀芯的相对压力,单位为mpa;ρ为流体密度,单位为kg/m3;
[0019]
步骤13、计算阀前后流量差为:
[0020]
δq=q-q
ꢀꢀ
(3)
[0021]
式中:δq为阀前后流量差,单位为m3/s;q为缸体输出流量,单位为m3/s;q为伺服阀阀口流量,单位为m3/s。
[0022]
所述步骤2具体包括:
[0023]
步骤21:变分模态分解将模态函数重新定义为一个调幅-调频信号;
[0024]
步骤22:对每一个模态函数,利用第一次希尔伯特变换求其解析信号以获得单边频谱;
[0025]
步骤23:根据混合预估中心频率,调制频谱至对应基频带;
[0026]
步骤24:计算解调信号的时间梯度l2范数的平方,估计模态分量的带宽,并引入约束条件,构造受约束的变分模型;
[0027]
约束变分模型表达式为:
[0028][0029]
式中:δ(t)为狄利克雷函数;*为卷积运算;{φk}为变分模态分解后的k个固有模态函数(imf)的集合;为k个模态分量中心频率的集合;k为变分模态分解设置的分解模态个数;f表示输入信号;uk表示k个模态分量各自的中心频率;
[0030]
步骤25:求解变分问题时,为在高斯噪声情况下保证信号重构精度,引入惩罚因子α,为使约束条件保持严格性,引入根据经验初始选取的拉格朗日乘子α和的引入将约束性变分问题转变为无约束变分问题;
[0031]
步骤26:采用交替方向乘法算子求解步骤25中变分问题,得到k个模态分量;具体的:
[0032]
通过交替更新寻找扩展拉格朗日表式的“鞍点”,交替更新具体公式如下:
[0033][0034]
式中:为交替更新后所得到的φk、的值;为为了使用admm算法求解而构造的拉格朗日函数;a、b、c为公式(4)中约束条件里φk、前计算得到的系数,是3个常数;n为代数,交替更新公式需循环多次迭代,取最初数值为第一代,即n=1;ρ为惩罚因子。
[0035]
所述步骤3中,对每个固有模态函数的分量信号进行第二次希尔伯特变换得到对应的瞬时频率;希尔伯特变换公式为:
[0036][0037]
式中:h(t)表示希尔伯特变换的时频函数;p表示柯西主值;mk表示每个固有模态函数(imf);
[0038]
在分别进行第二次希尔伯特变换变换后,原始流量信号δq(t)可以作如下表达:
[0039][0040]
式中,h(t,ω)表示在希尔伯特变换空间中时间与瞬时频率的函数,即式(6)中的时频函数;bi表示开关因子;ai(t)表示幅值函数;ωi(t)表示瞬时频率。
[0041]
所述步骤5中t分布随机邻域嵌入算法,包括以下步骤:
[0042]
步骤51:取高维数据序列h(x)={x1,x2,...,xn},根据下式求解高维数据点xi和xj之间的条件概率分布p
j|i
[0043][0044]
式中:xi、xj是输入高维数据集中的两个数据点;p
j|i
是高维数据点xi和xj之间的条件概率分布;ξi是以xi为中心点的高斯分布方差,由给定困惑度和二分搜索确定;m为从i起但不等于i的第m个高维空间样本数据点;
[0045]
步骤52:计算高维样本的联合概率密度p
ij
[0046][0047]
式中:p
j|i
和p
i|j
是高维数据点xi和xj之间的条件概率分布;p
ij
是高维样本的联合概率密度;n是数据点的个数;
[0048]
步骤53:初始化低维空间的样本数据y
(0)
[0049]y(0)
={y1,y2,...,yn}
ꢀꢀ
(10)
[0050]
式中:y
(0)
为低维空间样本数据集;y1到yn为低维空间样本数据点;
[0051]
步骤54:基于自由度为1的t分布计算低维空间样本点的联合概率密度f
ij
和梯度
[0052][0053]
式中:yi和yj为降到低维的低维空间样本数据点;u为从i起但不等于i的第u个低维空间样本数据点;f
ij
为低维空间样本点的联合概率密度;
[0054][0055]
式中:c为代价函数;y为低维空间样本数据集;yi和yj为降到低维的低维空间样本数据点;p
ij
为高维样本的联合概率密度;f
ij
为低维空间样本点的联合概率密度;为目标函数的梯度;
[0056]
步骤55:更新输出
[0057][0058]
式中:r为迭代次数;η为学习率;t为动量因子;为目标函数的梯度;y为低维空间样本数据集;
[0059]
步骤56:若满足迭代次数r,则停止迭代,否则返回步骤54。
[0060]
本发明的有益效果在于:
[0061]
1.在诊断准确率上具有更大优势,适用于燃气轮机控制系统执行机构故障诊断,vht对于微弱特征提取的独特优势可以大大改进故障特征微弱而难以辨识的问题,减少误判与迟判,提高诊断准确率。
[0062]
2.希尔伯特黄变换(hht)由于使用经验模态分解(emd)分解提取故障特征,将非线性数据转换为线性信号,存在较为严重的模态混淆问题,且经验模态分解(emd)方法没有严格的数学基础,使用中存在一定的漏洞,因此希尔伯特黄变换(hht)整体存在模态混淆、分解效率低、故障特征提取效果不理想的缺点。使用变分模态分解(vmd)来替换经验模态分解(emd)可以有效解决其遇到的问题,大大提高信号分解的质量,从而提高故障诊断准确率。
附图说明
[0063]
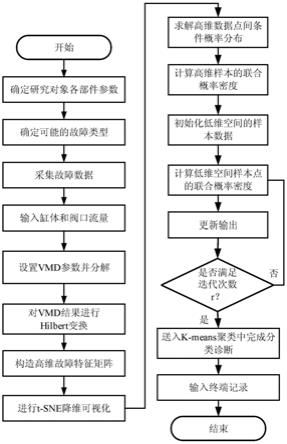
图1为本发明一种基于信号分解的燃气轮机电动执行机构故障诊断方法实施例的的流程图;
[0064]
图2是本发明中使用的改进变分模态分解(vht)结构原理图;
[0065]
图3本发明的一种基于信号分解的燃气轮机电动执行机构故障诊断方法的结构图;
[0066]
图4是本发明的一种基于信号分解的燃气轮机电动执行机构故障诊断方法的终端设备故障诊断结果展示图;
[0067]
图5是本发明的一种基于信号分解的燃气轮机电动执行机构故障诊断方法的诊断
效果对比图。
具体实施方式
[0068]
下面结合附图,对实施例作详细说明。
[0069]
本发明是通过对燃气轮机的电动执行机构流量信号的分析处理进行故障诊断,电动执行机构包括伺服电动机、伺服阀、减速器、流量管道、水箱及位置发生器等,电动执行机构通过电信号控制调节阀改变阀门开度以控制流量。
[0070]
如图1所示的燃气轮机电动执行机构所使用的故障诊断方法包括:
[0071]
步骤1、采集设备正常与故障数据作为原始数据,并随机分为10组;再计算每一组当前的阀前阀后流量:
[0072]
给定开度下测量得到的伺服阀缸体输出流量q与阀口流量q,计算得到阀前后流量差δq作为输入信号;具体的又分为:
[0073]
步骤11、计算伺服阀缸体流量:
[0074][0075]
式中,q为缸体输出流量,单位为m3/s;a1为活塞直径,单位为m;a2为活塞杆直径,单位为m;δt为活塞的相对速度,单位为m/s;δ为经验误差值,单位为m3/s。
[0076]
步骤12、计算伺服阀阀口流量:
[0077][0078]
式中,q为伺服阀阀口流量,单位为m3/s;τ为经验系数;y为阀芯运动位移,单位为m;δp为阀芯的相对压力,单位为mpa;ρ为流体密度,单位为kg/m3。
[0079]
步骤13、计算阀前后流量差为:
[0080]
δq=q-q
ꢀꢀ
(3)
[0081]
式中:δq为阀前后流量差,单位为m3/s;q为缸体输出流量,单位为m3/s;q为伺服阀阀口流量,单位为m3/s。
[0082]
步骤2、对每一组进行变分模态分解,即依次进行变分问题构造与变分问题求解;得到k个模态分量;具体包括:
[0083]
步骤21:变分模态分解将imf重新定义为一个调幅-调频信号;
[0084]
步骤22:对每一个模态函数,进行第一次希尔伯特变换(hilbert变换)求其解析信号以获得单边频谱;
[0085]
步骤23:根据混合预估中心频率,调制频谱至对应基频带;
[0086]
步骤24:计算解调信号的时间梯度l2范数的平方,估计模态分量的带宽,并引入约束条件,构造受约束的变分模型;
[0087]
约束变分模型表达式为:
[0088]
[0089]
式中:δ(t)为狄利克雷函数;*为卷积运算;{φk}为变分模态分解后的k个固有模态函数(imf)的集合;为k个模态分量中心频率的集合;k为变分模态分解设置的分解模态个数;f表示输入信号;uk表示k个模态分量各自的中心频率。
[0090]
步骤25:求解变分问题时,为在高斯噪声情况下保证信号重构精度,引入惩罚因子α,为使约束条件保持严格性,引入根据经验初始选取的拉格朗日乘子α和的引入将约束性变分问题转变为无约束变分问题;
[0091]
步骤26:采用交替方向乘法算子(admm)求解步骤25中变分问题,得到k个模态分量;具体的:
[0092]
通过交替更新寻找扩展拉格朗日表式的“鞍点”,交替更新具体公式如下:
[0093][0094]
式中:为交替更新后所得到的φk、的值;为为了使用admm算法求解而构造的拉格朗日函数;a、b、c为公式(4)中约束条件里φk、前计算得到的系数,是3个常数;n为代数,交替更新公式需循环多次迭代,取最初数值为第一代,即n=1;α为惩罚因子。
[0095]
步骤3:将经变分模态分解得到的各模态分量分别进行第二次希尔伯特变换,参照经验设置第二次希尔伯特变换的参数,进行运算;并提取各模态分量的频域特征量进行组合得到原始流量信号的特征量;具体的:
[0096]
对每个固有模态函数的分量信号进行第二次希尔伯特变换得到对应的瞬时频率;希尔伯特变换公式(两次希尔伯特变换所使用的公式相同)为:
[0097][0098]
式中:h(t)表示希尔伯特变换的时频函数;p表示柯西主值;mk表示每个imf。
[0099]
在分别进行第二次希尔伯特变换变换后,原始信号δq(t)可以作如下表达:
[0100][0101]
式中,h(t,ω)表示在希尔伯特变换空间中时间与瞬时频率的函数,即式(6)中的时频函数;bi表示开关因子;ai(t)表示幅值函数;ωi(t)表示瞬时频率。
[0102]
针对传统故障诊断方法中信号分解部分无法适应微弱的故障特征、分解层数复杂、模态混淆等问题,本发明利用由步骤3和步骤4组成的改进变分模态分解算法(vht),即变分模态分解(vmd)与hilbert变换相结合,形成适应性更强的信号分解方法;本发明中vht算法结构的流程如图2所示。
[0103]
步骤4:构造高维特征矩阵,将10组结果按顺序并列成高维输出矩阵,作为下一步
的输入;
[0104]
步骤5:将步骤4的结果送入t分布随机邻域嵌入算法(t-sne)中进行降维可视化,对数据二次处理;得到分类结果的可视化图像,并输出二维特征矩阵用作最终分类;t分布随机邻域嵌入算法具体为设置算法参数,对经过改进第二次希尔伯特变换后构造成(步骤4)的高维特征矩阵进行二次降维、提取;具体的,t分布随机邻域嵌入算法,包括以下步骤:
[0105]
步骤51:取高维数据序列h(x)={x1,x2,...,xn},根据下式求解高维数据点xi和xj之间的条件概率分布p
j|i
[0106][0107]
式中:xi、xj是输入高维数据集中的两个数据点;p
j|i
是高维数据点xi和xj之间的条件概率分布;ξi是以xi为中心点的高斯分布方差,由给定困惑度和二分搜索确定;m为从i起但不等于i的第m个高维空间样本数据点。
[0108]
步骤52:计算高维样本的联合概率密度p
ij
[0109][0110]
式中:p
j|i
和p
i|j
是高维数据点xi和xj之间的条件概率分布;p
ij
是高维样本的联合概率密度;n是数据点的个数。
[0111]
步骤53:初始化低维空间的样本数据y
(0)
[0112]y(0)
={y1,y2,...,yn}
ꢀꢀ
(10)
[0113]
式中:y
(0)
为低维空间样本数据集;y1到yn为低维空间样本数据点。
[0114]
步骤54:基于自由度为1的t分布计算低维空间样本点的联合概率密度f
ij
和梯度
[0115][0116]
式中:yi和yj为降到低维的低维空间样本数据点;u为从i起但不等于i的第u个低维空间样本数据点;f
ij
为低维空间样本点的联合概率密度。
[0117][0118]
式中:c为举例定义的代价函数;y为低维空间样本数据集;yi和yj为降到低维的低维空间样本数据点;p
ij
为高维样本的联合概率密度;f
ij
为低维空间样本点的联合概率密度;为目标函数的梯度。
[0119]
步骤55:更新输出
[0120][0121]
式中:r为迭代次数;η为学习率;t为动量因子;为目标函数的梯度;y为低维空间样本数据集。
[0122]
步骤56:若满足迭代次数r,则停止迭代,否则返回步骤54;
[0123]
步骤6:将步骤5得到的二维特征矩阵送入k-means分类器中进行聚类,完成对经t-sne二次降维提取后的故障信号进行分类辨识,得到故障诊断结果。
[0124]
步骤7:将算法模块的最终输出连接到终端设备,实时显示诊断结果,实现在线诊断。
[0125]
如图3所示的一种电动执行机构基于信号分解的故障诊断系统的结构图,该系统包括电动执行机构模块、控制器模块、故障类型模块、信号接收处理模块、故障诊断算法模块、终端设备。电动执行机构模块包含伺服阀模块及伺服电机模块。
[0126]
电动执行机构模块,其为建立的电动执行机构模型,包含伺服阀模块及伺服电机模块,控制系统即是要实现对该模型的流量控制。
[0127]
控制器模块为pid控制器,用于跟踪误差进行液压执行器模块的流量调节控制,对电动执行机构模块进行闭环控制,使其实际流量更接近于理想流量。
[0128]
故障类型模块为由dspace系统和实物部分相连组成用以确定可能发生的故障类型。
[0129]
信号接收处理模块,其所用算法即为改进变分模态分解(vht),先对输入进来的数据进行变分模态分解,再将分解后的数据进行希尔伯特变换,得到该部分输出。在此部分利用改进算法的优良性能,消除原始信号的噪声,更好的提取微弱故障信号,为后面的诊断算法提供优质的输入信号。
[0130]
故障诊断算法模块,将信号接收处理模块输出的数据首先构造成高维特征矩阵,再送入t分布随机邻域嵌入算法(t-sne)进行二次降维与可视化,最后送入k-means聚类中完成分类。由于t分布随机邻域嵌入算法(t-sne)优良的数据处理能力,使其输出送入k-means聚类中可以达到较高的诊断准确率。
[0131]
终端设备,用以将故障诊断算法模块得到的诊断结果进行直观的表示,实现在线实时数据监测。
[0132]
如图4所示的电动执行机构的基于信号分解的故障诊断在线控制系统的终端设备故障诊断结果展示界面。如图4所示,通过终端图像记录器可以看出各故障之间没有重叠或边界模糊,很好的展示出故障诊断的结果,同时可以将其记录存档。
[0133]
如图5所示的基于信号分解的燃气轮机电动执行机构故障诊断算法的诊断效果图。本发明的改进变分模态分解(vht)与t分布随机邻域嵌入算法(t-sne)相结合取得了优良的诊断效果,各故障之间同样没有重叠或边界模糊,很好的抑制了噪声,且有效提取了微弱故障特征,达到了较高的诊断准确率。
[0134]
此实施例仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,可轻易想到的变化或替换,都应涵盖在本发明的保护范围之内。因此,本发明的保护范围应该以权利要求的保护范围为准。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。