1.本发明涉及一种用于确定第一车辆与跟随第一车辆的第二车辆之间的最佳距离的方法和距离确定装置。
背景技术:
2.在车辆技术中,降低车辆的能耗变得越来越重要。一方面,车辆的运行成本随着车辆的能耗降低,例如由于节省燃料或电能而降低。另一方面,随着能耗降低,车辆的行驶里程增加,也就是说车辆在不对其蓄能器充电的情况下能够驶过的路程增加。此外,由于车辆运行所造成的环境污染随着能耗降低,例如由于车辆的排放减少或者由于在制造用于车辆的能量载体时的排放减少而降低。
3.车辆的能耗尤其是随着车辆在其行驶时所遭受的空气阻力而增加。通过该车辆以短距离来跟随另一车辆,可以降低该空气阻力。这种所谓的背风面行驶例如在自行车运动和摩托车运动中被使用,以提高能效。已经发现:在背风面行驶的情况下,前面行驶的车辆的空气阻力也可以被降低,使得两个车辆的能效都被提高。
技术实现要素:
4.本发明的任务在于:确定第一车辆与跟随第一车辆的第二车辆之间的最佳距离,以便降低两个车辆的能耗。
5.按照本发明,该任务利用一种用于确定第一车辆与跟随第一车辆的第二车辆之间的最佳距离的方法来被解决。在该方法中,利用传感器单元来检测在第一车辆后面的空气涡流,并且在考虑这些空气涡流的情况下利用计算单元来计算该最佳距离。
6.本发明基于如下认识:在行驶中的车辆后面可能形成空气涡流,这些空气涡流是在车辆的尾部处发生气流的流分离的情况下被引起。这样的空气涡流尤其是在航空业是众所周知的,即其为在飞行中的飞机后面的航迹涡流。在这些空气涡流的中心,形成降低的气压,该降低的气压引起降低的空气阻力。降低的空气阻力可以被用于跟随该车辆的第二车辆,以便降低该第二车辆的能耗。
7.在行驶中的车辆后面形成的空气涡流的具体构造和强度、以及借此还有距车辆尾部的距离——在该距离处这些空气涡流有效地降低空气阻力,以复杂的方式取决于不同的影响参量,尤其是取决于车辆的速度、质量和几何造型,以及取决于天气条件。
8.本发明提出:利用传感器单元来检测在前面行驶的第一车辆后面的空气涡流。该传感器单元可以是第一车辆的传感器单元或者跟随第一车辆的第二车辆的传感器单元。还提出:依据所检测到的空气涡流来计算第一车辆与第二车辆之间的最佳距离。为此可以使用第一车辆的计算单元、第二车辆的计算单元和/或车辆外部的计算单元。
9.利用这两个车辆之一的传感器单元对空气涡流的直接检测能够实现与对这些空气涡流的估计或者理论计算相比对该最佳距离的更可靠且更精确的计算。
10.依据该最佳距离,第一车辆和/或第二车辆可以被控制为使得这些车辆特别节能
地行驶。为此,使两个车辆之间的实际距离(ist距离)与该最佳距离(目标距离(soll距离))匹配。换言之,调节ist距离,使得该ist距离对应于soll距离。
11.在按照本发明的方法的一个实施方式中,第一车辆是载货车。载货车的箱形尾部引起特别频繁且明显的空气涡流。
12.在按照本发明的方法的另一实施方式中,传感器单元具有光学雷达(lidar)传感器。lidar(light detection and ranging(光探测和测距)),也称为ladar(laser detection and ranging),是一种方法,在该方法中,利用光学雷达传感器来发出激光束并且探测并分析被对象散射回来的激光光线。光学雷达传感器在很多车辆中本来就存在,在这些车辆中,该光学雷达传感器被用于周围环境检测、障碍物识别和/或测距。尤其是自主或者部分自主驾驶车辆通常拥有光学雷达传感器。光学雷达还被用在飞机中,以探测空气漩涡。
13.用光学雷达传感器来检测空气涡流利用了:空气涡流具有灰尘颗粒和气溶胶。这些颗粒可以将激光光线散射回来并且以这种方式被检测到。当这种颗粒移动时,由于多普勒效应,被散射回来的激光光线的频率和波长相对于所发出的激光束发生变化。由此,可以检测颗粒的速度和移动方向。
14.在按照本发明的方法的另一实施方式中,光学雷达传感器在检测空气涡流时关于第二车辆被枢转、也就是说相对于第二车辆被枢转。由此,可以更好地检测在第一车辆后面的空气涡流。
15.在按照本发明的方法的另一实施方式中,在考虑第一车辆的行驶信息和/或第二车辆的行驶信息的情况下计算该最佳距离。这种行驶信息例如是这些车辆之一的速度、加速度、制动能力、质量或者该车辆是否自主驾驶以及自主驾驶的程度。
16.基于这些行驶信息,可以确定该最佳距离不得小于的安全距离。换言之,该安全距离界定该最佳距离的下限。借此,应该避免第二车辆在第一车辆的制动过程中撞上去。
17.这些车辆的速度越高、第一车辆的制动能力越好并且第二车辆的制动能力越差,该安全距离就可被选择得越大。此外,第二车辆的自主驾驶能力越好,该安全距离就可被选择得越小。
18.在按照本发明的方法的另一实施方式中,该最佳距离被输出给第一车辆的驾驶员和/或第二车辆的驾驶员。这使得相应的驾驶员能够将其车辆控制为使得两个车辆之间的实际距离(ist距离)与该最佳距离匹配。有利地,车辆拥有测距装置,利用该测距装置可以自动测量ist距离并且将其输出给驾驶员。
19.在按照本发明的方法的另一实施方式中,第一车辆和/或第二车辆自动地被控制,使得第二车辆以该最佳距离跟随第一车辆。借此,使两个车辆的驾驶员免于手动地使ist距离与该最佳距离匹配的任务。因此,当第一车辆和/或第二车辆自主驾驶时,按照本发明的方法特别有利。
20.在按照本发明的方法的另一实施方式中,第一车辆的行驶信息被传输给第二车辆和/或第二车辆的行驶信息被传输给第一车辆。由此,该最佳距离可以在接收该行驶信息的车辆处被计算。这一点尤其是当该车辆拥有比另一车辆性能更卓越的计算单元时有利。
21.在按照本发明的方法的另一实施方式中,该行驶信息在使用v2v(车辆到车辆,vehicle-to-vehicle)通信或者v2x(车辆到一切,vehicle-to-everything)通信的情况下
被传输。尤其是无线电技术wlan(无线局域网(wireless local area network))、dsrc(专用短程通信(dedicated short range communication))和蜂窝无线电都适合于此。
22.上述任务还利用一种按照本发明的用于确定第一车辆与跟随第一车辆的第二车辆之间的最佳距离的距离确定装置来解决。该距离确定装置具有检测单元,该检测单元被设立用于检测在第一车辆后面的空气涡流。该距离确定装置还具有计算单元,该计算单元被设立用于在考虑这些空气涡流的情况下计算该最佳距离。
23.该距离确定装置能够实施按照本发明的方法。因而,该距离确定装置的优点对应于按照本发明的方法的上述优点。
附图说明
24.在下文,参照附图来更详细地阐述本发明的实施方式。在此:
25.图1示出了按照本发明的距离确定装置的实施方式的框图;
26.图2示出了按照本发明的方法的实施方式的流程图;
27.图3示出了具有两个车辆的行驶情况。
具体实施方式
28.图1(fig 1)示出了按照本发明的用于确定第一车辆与跟随第一车辆的第二车辆之间的最佳距离的距离确定装置100的框图。距离确定装置100具有传感器单元102和计算单元104。附加地,距离确定装置100可具有其它功能模块,所述其它功能模块在图1中未示出。
29.传感器单元102被设立用于检测在第一车辆后面的空气涡流。为此,传感器单元102布置在第二车辆中或者布置在第二车辆上,例如布置在第二车辆的前部。替选地,传感器单元102可以布置在第一车辆上或者布置在第一车辆中,优选地布置在第一车辆的尾部。
30.传感器单元102具有光学雷达传感器,该光学雷达传感器可以从第二车辆朝着第一车辆的方向发出激光束。光学雷达传感器还可以探测该激光束的被散射回到该光学雷达传感器、例如被打漩涡的颗粒散射回到该光学雷达传感器的激光光线。光学雷达传感器还可以检测被散射回来的激光光线的频率和/或波长相对于所发出的激光束的变化。
31.此外,传感器单元102能够提供表示所检测到的空气涡流的测量数据。这些测量数据尤其是表征被散射回来的激光光线的频率和/或波长相对于所发出的激光束的变化。传感器单元102可以将这些测量数据传输给计算单元104。
32.传感器单元102还被设立为使光学雷达传感器枢转,使得激光束沿不同的方向穿过第一车辆后面的空间。优选地,传感器单元102可以使光学雷达传感器绕着两个彼此正交且与第二车辆的纵轴线正交的枢转轴线枢转。
33.计算单元104被设立用于在考虑这些空气涡流的情况下计算第一车辆与第二车辆之间的最佳距离。为此,该计算单元布置在第二车辆中或者布置在第二车辆上。替选地,传感器单元102可以布置在第一车辆上或者布置在第一车辆中。在这种情况下,传感器单元102可以利用发送单元将这些测量数据经由无线数据连接传输给计算单元104。
34.作为另一替选方案,该计算单元可以与这些车辆分开地布置,例如布置在总站中或者作为数据云服务(cloud service)的部分。在这种情况下,传感器单元102也可以利用
发送单元将这些测量数据经由无线数据连接传输给计算单元104。
35.计算单元104还可以依据从传感器单元102接收到的测量数据来以空间解析的方式计算在第一车辆后面的空间内的颗粒的速度和移动方向,并且从中获得关于在该空间内的空气涡流的信息。
36.可选地,利用计算单元104,可以在使用取决于空气涡流的位置相关的气压变化的模型的情况下根据所计算出的空气涡流来确定空气阻力降低的区域。
37.对于所提到的计算,除了处理器(cpu,central processing unit(中央处理单元))之外,计算单元104拥有工作存储器(ram,random access memory(随机存取存储器)),该工作存储器用于对变量和中间结果的易失性存储。处理器和工作存储器被合并在集成电路上。替选地,处理器和工作存储器可以彼此独立地布置,例如分别布置在不同的集成电路上。
38.计算单元104能够在计算该最佳距离时考虑第一车辆的行驶信息和/或第二车辆的行驶信息。尤其是,计算单元104可以依据行驶信息来计算第一车辆与第二车辆之间的安全距离并且将该最佳距离确定为使得该最佳距离不小于该安全距离。
39.计算单元104还能够将该最佳距离传输给第二车辆的输出单元,使得该最佳距离被输出给第二车辆的驾驶员。替选地,计算单元104可以将该最佳距离传输给第二车辆的控制单元,利用该控制单元来控制第二车辆,使得该第二车辆以该最佳距离跟随第一车辆。该控制单元尤其可以是第二车辆的驾驶员辅助系统的组成部分。
40.附加地或替选地,计算单元104可以将该最佳距离传输给第一车辆的输出单元,使得该最佳距离被输出给第一车辆的驾驶员。替选地,计算单元104可以将该最佳距离传输给第一车辆的控制单元,利用该控制单元来控制第一车辆,使得该第一车辆以该最佳距离在第二车辆前面行驶。该控制单元尤其可以是第一车辆的驾驶员辅助系统的组成部分。
41.如果计算单元104与这些车辆分开地布置,例如布置在总站中或者作为数据云服务的部分,则计算单元104可以将该最佳距离通过无线电传输给第一车辆和/或第二车辆。然后,该最佳距离可以如上所述地利用相应的车辆的输出单元或控制单元来被处理。
42.图2(fig 2)示出了按照本发明的方法的具有方法步骤201至204的实施方式的流程图200。该方法用于确定第一车辆与跟随第一车辆的第二车辆之间的最佳距离,并且在使用图1中的距离确定装置100的情况下被实施。
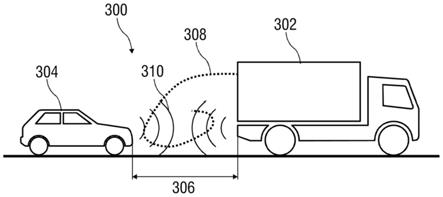
43.图3(fig 3)示例性示出了具有第一车辆302和第二车辆304的行驶情况,该第二车辆以距离306来跟随第一车辆302。第一车辆302是载货车,在该载货车后面形成空气涡流308,这些空气涡流示意性呈现为虚线曲线。第二车辆是载客车(pkw),该载客车配备有图1中的距离确定装置100。在这两个车辆302、304之间,存在借助于v2v或v2x的数据连接。为此,这两个车辆302、304分别拥有适合的发送和接收单元。
44.在第一方法步骤201中,利用距离确定装置100的传感器单元102来检测在第一车辆302后面的空气涡流308。为此,利用传感器单元102的光学雷达传感器朝着第一车辆302的方向发出激光束。此外,探测该激光束的被打漩涡的颗粒散射回到或者反射到光学雷达传感器的激光光线。还检测被散射回来的激光光线的频率和/或波长相对于所发出的激光束的光线的变化。
45.光学雷达传感器关于第二车辆304被枢转,使得该激光束的方向被改变。优选地,
使光学雷达传感器绕着两个彼此正交且与第二车辆304的纵轴线正交的枢转轴线枢转。
46.例如,光学雷达传感器被枢转为使得由光学雷达传感器发出的激光束“逐行”扫过两个车辆302、304之间的空间的假想的垂直截面。替选地,光学雷达传感器被枢转为使得该激光束“逐列”扫过该截面。
47.在第二方法步骤202中,利用距离确定装置100的计算单元104来计算两个车辆302、304之间的最佳距离。在此,所检测到的空气涡流308被考虑。附加地,第一车辆302的行驶信息和/或第二车辆304的行驶信息被考虑。如果第一车辆304的行驶信息加入该计算,则为此将该行驶信息利用数据连接传输给计算单元104。
48.为了确定该最佳距离,利用计算单元104,依据由光学雷达传感器所检测到的被散射回来的激光光线的频率和/或波长相对于所发出的激光束的变化,以空间解析的方式来确定在两个车辆302、304之间的空间内的颗粒的速度和移动方向。
49.基于所述速度和移动方向,利用计算单元104来计算在该空间内的空气涡流。此外,例如依据取决于空气涡流的位置相关的气压变化的模型,由计算单元104根据所计算出的空气涡流来确定在该空间内空气阻力降低的区域。
50.此外,利用计算单元104来确定在该区域中的与第一车辆302至少相距第一车辆302与第二车辆304之间的安全距离的位置。为此,该安全距离依据该行驶信息或这些行驶信息来被确定。
51.例如,该位置被确定为使得:在该区域中的与第一车辆302至少相距该安全距离的所有位置中,该位置的空气阻力最小。接着,该最佳距离被设置得等于该位置与第一车辆302的距离。
52.此外,利用计算单元104将该最佳距离传输给第二车辆304的输出单元。
53.在第三方法步骤203中,利用输出单元将该最佳距离以视觉方式输出给第二车辆304的驾驶员。为此,例如使用屏幕或者挡风玻璃显示器(head-up-display(平视显示器))。但是,该最佳距离也可以利用车辆304的扬声器单元以声音方式来被输出,例如作为语音消息来被输出。
54.替选地或附加地,在利用数据连接将该最佳距离传输给第一车辆302之后,可以将该最佳距离输出给该第一车辆的驾驶员。
55.在第四方法步骤204中,由驾驶员来使车辆302、304之间的距离306(ist距离)匹配,使得该距离对应于该最佳距离。为此,驾驶员使第二车辆304以适当的方式加速和/或制动。为此,可以利用测距装置来辅助驾驶员,该测距装置连续地自动测量该ist距离并且将该ist距离输出给驾驶员。为了测量该距离,尤其可以使用传感器单元102的光学雷达传感器,该光学雷达传感器也被用于检测空气涡流。
56.替选于将该最佳距离输出给驾驶员或除了将该最佳距离输出给驾驶员之外,可以将该最佳距离输出给相应的车辆302、304的控制单元。在这种情况下,车辆302、304之间的距离306可以利用该控制单元被调节为使得该距离对应于该最佳距离。
57.为此,相应的车辆302、304以适当的方式自动被加速和/或制动。为此,车辆302、304可拥有测距装置,该测距装置连续地自动测量当前距离306并且将该当前距离传输给该控制单元。为了测量该距离,尤其可以使用传感器单元102的光学雷达传感器,该光学雷达传感器也被用于检测空气涡流。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。