1.本发明涉及一种研磨机器人装置,该研磨机器人装置例如在对液晶面板、玻璃板、透镜、半导体晶片、铜板、印刷基板、滤光片、不锈钢板等板状部件的表面进行研磨加工、角边缘的倒角加工时使用。
背景技术:
2.以往,作为对这种玻璃板或者半导体晶片等被加工物进行研磨的装置,例如,已知有一种如下结构的专用机:使用了在聚酯薄膜等基材上结合了氧化铝等规定粒度的固定研磨粒而得到的研磨带。
3.现有技术文献
4.专利文献
5.专利文献1:日本专利第6673965号
6.专利文献2:日本特开平11-99458号
7.专利文献3:日本特开平11-99459号
技术实现要素:
8.发明要解决的技术问题
9.然而在上述现有结构的情况下,例如存在以下缺点:不能够灵活地应对半导体晶片、液晶面板、玻璃板、透镜、铜板、印刷基板、滤光片以及不锈钢板等各种被加工物的种类或者各种规格,从而不能够确保用途的灵活性以及扩大化。
10.用于解决技术问题的方案
11.本发明的目的是克服这样的缺点,在本发明中,第一方式所述的发明的特征在于,具备:多关节型机器人;研磨单元,安装于该多关节型机器人的前端,并研磨被加工物的被研磨面;以及同步控制部,对该多关节型机器人以及该研磨单元进行同步控制,上述研磨单元具备:研磨带,研磨上述被加工物的被研磨面;带传送机构,连续性地或者间歇性地传送该研磨带;以及压接机构,使该研磨带的研磨面压接于被加工物的被研磨面。
12.并且,第二方式所述的发明的特征在于,上述多关节型机器人是垂直多关节型机器人,并且,第三方式所述的发明的特征在于,具备摆动机构,该摆动机构使上述研磨带在与带传送方向正交的带宽度方向上进行摆动动作,并且,第四方式所述的发明的特征在于,在上述压接机构具备能够引导上述研磨带折返的压接部件,并且,第五方式所述的发明的特征在于,上述研磨单元的研磨结构是干式结构或者湿式结构。
13.并且,第六方式所述的发明的特征在于,具备:保持部,能够保持及释放上述被加工物;以及同步控制部,对上述多关节型机器人、上述研磨单元以及该保持部进行同步控制。
14.并且,第七方式所述的发明的特征在于,上述保持部具备:保持部件,能够保持上述被加工物;以及保持机构,能够保持及释放该被加工物,并且,第八方式所述的发明的特
征在于,负压吸附机构用作上述保持机构,并且,第九方式所述的发明的特征在于,上述保持部件水平回转自如地设置,在该保持部件的上表面设置有能够载置上述被加工物的载置面,并且在本发明中设置有使该保持部件连续性地或者间歇性地回转的水平回转机构。
15.发明效果
16.本发明如上所述,在第一方式所述的发明中,在多关节型机器人的前端安装有对被加工物的被研磨面进行研磨的研磨单元,能够通过同步控制部对多关节型机器人以及研磨单元进行同步控制,能够通过研磨单元研磨被加工物的被研磨面,上述研磨单元具备:研磨带,研磨上述被加工物的被研磨面;带传送机构,连续性地或者间歇性地传送研磨带;以及压接结构,使研磨带的研磨面压接于被加工物的被研磨面,因此能够通过多关节型机器人的前端的研磨单元的姿态以及位置控制、带传送机构对研磨带的传送、以及借助压接机构将研磨带的研磨面压接在被加工物的被研磨面上来对被加工物进行研磨加工,于是,通过设为多关节型机器人的末端执行器采用研磨单元的的结构,能够灵活地应对各种被加工物的种类或者各种规格,能够应对多品种且与专用机相比通用性较高,能够确保用途的灵活性以及扩大化,而且,上述研磨单元具备带传送机构以及压接机构,因此能够通过研磨带的研磨面压接在被加工物的被研磨面上来对被加工物进行研磨加工,从而能够通过研磨带的传送以及研磨带的压接之间的相互作用,提高研磨精度以及研磨面的表面粗糙度,从而能够进行良好的研磨加工。
17.并且,在第二方式所述的发明中,由于上述多关节型机器人是垂直多关节型机器人,因此能够通过具有多个关节(轴),且关节和连杆垂直地串联连接的结构,使机器人的前端在垂直面内大范围移动,从而能够提高研磨加工的作业性以及灵活性,并且,在第三方式所述的发明中,由于具备使上述研磨带在与带传送方向正交的带宽度方向上进行摆动动作的摆动机构,因此能够使上述研磨带在带宽度方向上进行摆动动作,于是,能够通过研磨带的传送、研磨带的压接以及摆动动作之间的相互作用,进一步提高研磨精度以及研磨面的表面粗糙度,从而能够进行良好的研磨加工,并且,在第四方式所述的发明中,由于在上述压接机构具备能够引导上述研磨带折返的压接部件,因此能够使研磨带的研磨面可靠地压接在被加工物的被研磨面上,从而能够进行顺畅且良好的研磨加工,并且,在第五方式所述的发明中,由于上述研磨单元的研磨结构是干式结构或者湿式结构,因此能够根据被加工物的材质或者研磨加工的规格,选择使用在基材上固接了固定研磨粒的结构的研磨带且不使用润滑剂的干式研磨结构、使用在基材上固接了固定研磨粒的结构的研磨带且一边供给润滑剂一边进行研磨的湿式研磨结构、或者使用未固接有固定研磨粒的纺布、无纺布、发泡体薄膜、植绒布作为研磨带且供给包含游离研磨粒的研磨剂的湿式研磨结构,从而能够提高研磨加工的灵活性,相应地,能够进行良好的研磨加工。
18.并且,在第六方式所述的发明中,由于具备:保持部,能够保持及释放上述被加工物;以及同步控制部,对上述多关节型机器人、上述研磨单元以及保持部进行同步控制,因此能够通过上述保持部可靠地保持及释放上述被加工物,并且能够通过同步控制部对上述多关节型机器人、上述研磨单元以及保持部进行同步控制,从而能够进行良好的研磨加工。
19.并且,在第七方式所述的发明中,由于上述保持部具备:保持部件,能够保持上述被加工物;以及保持机构,能够保持及释放被加工物,因此能够通过上述保持部件可靠地保持上述被加工物,并且能够通过保持机构将被加工物可靠地保持及释放在保持部件,从而
能够进行良好的研磨加工,并且,在第八方式所述的发明中,由于负压吸附机构用作上述保持机构,因此能够将被加工物可靠地保持在保持部件,并且能够简化保持机构的结构,并且,在第九方式所述的发明中,上述保持部件水平回转自如地设置,在保持部件的上表面设置有能够载置上述被加工物的载置面,并且在本发明中设置有使保持部件连续性地或者间歇性地回转的水平回转机构,因此除了上述多关节型机器人的各种动作之外,还能够通过借助水平回转机构形成的保持部件的连续性的或者间歇性的回转动作,提高被加工物的研磨加工的灵活性,从而能够灵活地应对各种被加工物的种类或者各种规格,能够应对多品种且与专用机相比灵活性较高,从而能够确保用途的灵活性以及扩大化。
附图说明
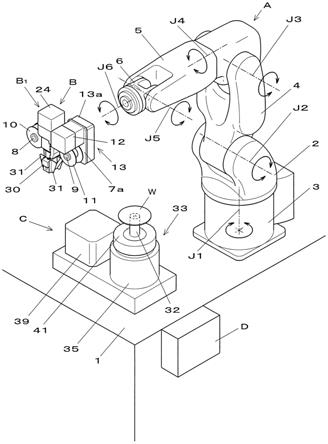
20.图1是本发明的实施方式例的分解立体图。
21.图2是本发明的实施方式例的局部侧剖视图。
22.图3是本发明的实施方式例的局部主剖视图。
23.图4是本发明的实施方式例的局部侧剖视图。
24.图5是本发明的实施方式例的局部侧剖视图。
25.图6是本发明的实施方式例的局部主剖视图。
26.图7是本发明的实施方式例的局部俯视剖视图。
27.图8是本发明的实施方式例的局部俯视剖视图。
28.图9是本发明的实施方式例的局部立体图。
29.图10是本发明的实施方式例的加工状态的侧剖视图。
30.图11是本发明的实施方式例的加工状态的侧剖视图。
31.图12是本发明的实施方式例的加工状态的侧剖视图。
32.图13是本发明的实施方式例的加工状态的主剖视图。
33.图14是本发明的实施方式例的加工状态的主剖视图。
34.图15是本发明的实施方式例的加工状态的主剖视图。
35.图16是本发明的实施方式例的加工状态的主剖视图。
36.附图标记说明
37.w
…
被加工物;w1…
被研磨面;t
…
研磨带;t1…
研磨面;t2…
带传送;a
…
多关节型机器人;b
…
研磨单元;b1…
带传送机构;b2…
压接机构;b3…
压接部件;c
…
保持部;d
…
同步控制部;e
…
摆动机构;f
…
压接;h
…
摆动动作;32
…
保持部件;32a
…
载置面;33
…
保持机构;33a
…
负压吸附机构;34
…
水平回转机构。
具体实施方式
38.图1至图16示出了本发明的实施方式例,在该情况下,如图1、图10所示,大致包括多关节型机器人a、安装于多关节型机器人a的前端并研磨被加工物w的被研磨面w1的研磨单元b,此外还包括能够保持及释放上述被加工物w的保持部c和对多关节型机器人a、研磨单元b以及保持部c进行同步控制的同步控制部d。在该情况下,上述多关节型机器人a以及保持部c与机台1相向配置。
39.在该情况下,如图2、图4、图9以及图10所示,上述研磨单元b具备:研磨带t,其研磨
上述被加工物w的被研磨面w1;带传送机构b1,其连续性地或者间歇性地传送研磨带t;以及压接机构b2,其使研磨带t的研磨面t1压接f在被加工物w的被研磨面w1上。
40.在该情况下,上述研磨带t例如使用在聚酯薄膜、金属、织物、发泡体薄膜以及植绒布等基材上涂布或者结合了氧化铝、氧化铬、碳化硅以及金刚石等规定粒度的固定研磨粒而得到的部件。此外,可以采用:使用在这样的基材上固接了固定研磨粒的结构的研磨带且不使用润滑剂的干式研磨结构、使用在基材上固接了固定研磨粒的结构的研磨带且一边供给润滑剂一边进行研磨的湿式研磨结构、或者将没有固接固定研磨粒的纺布、无纺布、发泡体薄膜、植绒布用作研磨带且供给包含游离研磨粒的研磨剂的湿式研磨结构,因此,这里所说的研磨带t包括固接了固定研磨粒的结构的研磨带、没有固接固定研磨粒的结构的研磨带。
41.并且,在该情况下,上述多关节型机器人a采用垂直多关节型机器人。即,如图1所示,回转部2相对于主体部3绕轴线j1回转,下臂部4绕轴线j2旋转,上臂部5相对于下臂部4绕轴线j3旋转,手腕部6相对于上臂部5绕轴线j4、轴线j5、轴线j6旋转,上述回转部2的回转以及下臂部4、上臂部5、手腕部6的旋转通过省略图示的多个伺服电机来进行,形成所谓的6轴垂直多关节型机器人的结构。
42.并且,在该情况下,如图3、图4、图6以及图7所示,具备使上述研磨带t绕与带传送t2方向正交的带宽度方向进行摆动动作h的摆动机构e而构成,而且,如图3、图4所示,在上述压接机构b2具备能够引导上述研磨带t折返的压接部件b3而构成。
43.在该情况下,作为上述带传送机构b1,如图3、图4以及图5所示,在上述多关节型机器人a的手腕部6安装有上述研磨单元b的安装部件7,放卷轴8以及收卷轴9旋转自如地配置于安装部件7,在放卷轴8装配有满卷盘10,在收卷轴9装配有空卷盘11,从满卷盘10引出的研磨带t挂绕到空卷盘11上,如图3、图5所示,在安装部件7设置有安装板7a,收卷轴9以及空卷盘11通过安装于安装板7a的收卷马达12经由齿轮机构13而进行收卷旋转,在安装部件7设置有齿轮机构13的罩13a,齿轮机构13通过彼此啮合的齿轮13b以及齿轮13c构成,如图8所示,放卷轴8以及满卷盘10通过上述收卷轴9以及空卷盘11的收卷旋转经由研磨带t而进行放卷旋转,通过上述收卷马达12的旋转,研磨带t从满卷盘10向空卷盘11朝向图3中的箭头方向的带传送t2方向连续性地或者间歇性地进行传送,而且,上述放卷轴8被空转防止机构14施加旋转阻力,在该情况下,在上述空转防止机构14中,构成为:在上述放卷轴8安装有摩擦部件15,在上述安装部件7安装有筒部件16,在筒部件16中内置有球状的摩擦体17、弹簧18以及止动螺钉19,通过弹簧18将摩擦体17弹压到摩擦部件15的表面上从而对摩擦部件15施加旋转阻力,防止研磨带t的意外放卷旋转而导致的松弛现象,对研磨带t施加适度的张紧力,从而提高研磨带t的传送t2的顺畅化以及传送t2的稳定性。
44.在该情况下,在上述摆动机构e中,如图3、图4、图6以及图7所示,以下述方式构成:在上述安装部件7安装有保持安装部件20,在保持安装部件20上通过滑动台架22以及引导件23将摆动部件21设置为绕与上述带传送t2方向正交的带宽度方向自如地进行摆动动作h,在保持安装部件20的上部安装有摆动用马达24,并且旋转自如地设置有驱动轴25,通过接头26连结摆动用马达24的主轴与驱动轴25,在驱动轴25与摆动部件21之间夹装有偏心轮机构27,在该情况下,在驱动轴25形成有偏心轴部25a,该偏心轴部25a相对于驱动轴25的旋转轴线o具有偏心量为ε的旋转轴线o1,在偏心轴部25a旋转自如地设置有偏心轮28,在上述
摆动部件21形成有嵌合凹部21a,在嵌合凹部21a形成有与偏心轮28的外周面接触的彼此相向的一对接触面21b/21b,通过由摆动用马达24带动的偏心轮28的偏心旋转,使摆动部件21绕带宽度方向进行摆动动作h。
45.而且,在该情况下,作为上述压接机构b2,如图3、图4以及图10所示,以下述方式构成:在上述摆动部件21并列配置有两个缸体部29/29,在缸体部29/29的两个柱塞29a/29a的下端部架设有进退部件30,在进退部件30设置有压接部件b3,该压接部件b3能够引导上述研磨带t折返并以旋转轴线p为中心旋转自如,在进退部件30的左右安装有两组引导研磨带t的两侧端面的前后一对的带引导件31/31,通过缸体部29/29的柱塞29a/29a隔着压接部件b3使研磨带t的研磨面t1压接在被加工物w的被研磨面w1上。
46.并且,在该情况下,如图1、图2所示,上述保持部c具备能够保持被加工物w的保持部件32和能够保持及释放被加工物w的保持机构33而构成,在该情况下,负压吸附机构33a用作上述保持机构33,并且,在该情况下,上述保持部件32水平回转自如地设置,在保持部件32的上表面设置有能够载置上述被加工物w的载置面32a,并且设置有使保持部件32连续性地或者间歇性地回转的水平回转机构34而构成。
47.即,作为上述水平回转机构34,在该情况下,如图1、图2所示,以下述方式构成:在机台1安装有保持安装台35,在保持安装台35上通过轴承部37旋转自如地设置有旋转轴36,在旋转轴36的下部设置有从动带轮38,在保持安装台35安装有回转用马达39,在回转用马达39的主轴安装有省略图示的驱动带轮,在驱动带轮与从动带轮38之间卷绕有驱动带40,在旋转轴36安装有上述保持部件32,通过回转用马达39经由驱动带40使保持部件32连续性地或者间歇性地回转,而且,作为上述负压吸附机构33a,以下述方式构成:在保持部件32的外周面嵌接有环状部件41,在环状部件41设置有与省略图示的负压源连接的吸引口部41a,连通形成环状部件41的吸引口部41a与保持部件32的吸引路32b,设置为通过吸附或者进行负压解除而能够保持及释放被加工物w,该被加工物w载置于保持部件32的载置面32a。另外,在上述实施方式例中,上述保持机构33采用了利用负压的负压吸附机构33a,代替地,还可以采用夹持机构或者按压机构等所谓的机械性的、机构性的保持机构。
48.并且,在该情况下,如图1所示,上述同步控制部d形成为对上述多关节型机器人a、上述研磨单元b以及保持部c进行同步控制的结构。该同步控制例如以下述方式构成:包括控制电路,该控制电路使上述多关节型机器人a、上述研磨单元b以及上述保持部c的动作控制或者反馈控制同步,例如,由cpu、rom、ram、hdd以及具有输入/输出端口的计算机或者各种电路构成,对设定多关节型机器人a的tcp(工具中心点)的姿态、位置等动作路径的程序进行处理,以控制上述研磨单元b的研磨带t的连续或者间歇传送的时间、研磨带t的传送速度,分别使设定上述保持部c的被加工物w的移动时间、移动速度、旋转以及旋转停止的间歇旋转的间隔时间、被加工物w的旋转速度等的程序同步而进行控制。
49.由于本实施方式例为上述结构,因此如图1、图2以及图3所示,在多关节型机器人a的前端安装有对被加工物w的被研磨面w1进行研磨的研磨单元b,人为或者自动地将被加工物w传送给保持部c,能够通过同步控制部d对多关节型机器人a、研磨单元b以及保持部c进行同步控制,通过研磨单元b研磨被加工物w的被研磨面w1,上述研磨单元b具备研磨上述被加工物w的被研磨面w1的研磨带t、连续性地或者间歇性地传送研磨带t的带传送机构b1、以及使研磨带t的研磨面t1压接在被加工物w的被研磨面w1上的压接机构b2,因此能够通过多
关节型机器人a的前端的研磨单元b的姿态及位置的控制、带传送机构b1对研磨带t的传送t2、以及通过压接机构b2形成的研磨带t的研磨面t1相对于被加工物w的被研磨面w1的压接f,对被加工物w进行研磨加工,例如,如图10所示,在被加工物w的表面的研磨中,能够通过压接机构b2将研磨带t的研磨面t1压接f在被加工物w的被研磨面w1上,通过研磨带t的传送t2、研磨带t的压接f以及多关节型机器人a的前端的移动动作的复合动作,利用研磨带t的研磨面t1对被加工物w的被研磨面w1进行研磨加工,并且,如图11所示,在被加工物w的角边缘的c面的倒角研磨中,能够通过压接机构b2将研磨带t的研磨面t1以大致45度的倾斜状态压接f在被加工物w的被研磨面w1上,通过研磨带t的传送t2、研磨带t的压接f以及多关节型机器人a的前端的移动动作的复合动作,利用研磨带t的研磨面t1对被加工物w的被研磨面w1进行研磨加工,并且,如图12所示,在被加工物w的角边缘的r面的倒角研磨中,能够通过压接机构b2将研磨带t的研磨面t1以大致45度的倾斜状态压接f在被加工物w的被研磨面w1上,使多关节型机器人a的前端进行摆动动作y,通过研磨带t的传送t2、研磨带t的压接f以及多关节型机器人a的前端的摆动和移动动作的复合动作,利用研磨带t的研磨面t1对被加工物w的被研磨面w1进行研磨加工,并且,如图13所示,在被加工物w的端面的研磨中,能够通过压接机构b2将研磨带t的研磨面t1压接f在被加工物w的被研磨面w1上,通过研磨带t的传送t2、研磨带t的压接f以及多关节型机器人a的前端的移动动作的复合动作,利用研磨带t的研磨面t1对被加工物w的被研磨面w1进行研磨加工,并且,如图14所示,在被加工物w的角边缘的c面的倒角研磨中,能够通过压接机构b2将研磨带t的研磨面t1以大致45度的倾斜状态压接f在被加工物w的被研磨面w1上,通过研磨带t的传送t2、研磨带t的压接f以及多关节型机器人a的移动动作的复合动作,利用研磨带t的研磨面t1对被加工物w的被研磨面w1进行研磨加工,并且,如图15所示,在被加工物w的角边缘的r面的倒角研磨中,能够通过压接机构b2将研磨带t的研磨面t1压接f在被加工物w的被研磨面w1上,通过研磨带t的传送t2、研磨带t的压接f以及多关节型机器人a的前端的摆动动作y和移动动作的复合动作,利用研磨带t的研磨面t1对被加工物w的被研磨面w1进行研磨加工,并且,如图16所示,在被加工物w的端面以及两角边缘的r面的倒角研磨中,能够通过压接机构b2将研磨带t的研磨面t1压接f在被加工物w的被研磨面w1上,通过研磨带t的传送t2、研磨带t的压接f以及多关节型机器人a的前端的摆动动作y和移动动作的复合动作,利用研磨带t的研磨面t1对被加工物w的被研磨面w1进行研磨加工,除此之外,能够选择多种多样的研磨规格,于是,通过多关节型机器人a的末端执行器形成为采用研磨单元b的结构,能够灵活地应对各种被加工物w的种类或者各种规格,能够应对多品种且与专用机相比通用性较高,能够确保用途的灵活性以及扩大化,而且,上述研磨单元b具备带传送机构b1以及压接机构b2,因此能够通过研磨带t的研磨面t1相对于被加工物w的被研磨面w1的压接f来对被加工物w进行研磨加工,能够通过研磨带t的传送t2以及研磨带t的压接f之间的相互作用,提高研磨精度以及研磨面t1的表面粗糙度,从而能够进行良好的研磨加工。
50.在该情况下,如图1所示,由于上述多关节型机器人a是垂直多关节型机器人,因此能够通过具有多个关节(轴),且关节和连杆垂直地串联连接的结构使机器人的前端在垂直面内大范围移动,能够提高研磨加工的作业性以及灵活性,并且,在该情况下,由于具备使上述研磨带t绕与带传送t2方向正交的带宽度方向进行摆动动作h的摆动机构e,因此除了上述图10至图16的加工状态之外还能够使上述研磨带t绕带宽度方向进行摆动动作h,于
是,能够通过研磨带t的传送t2、研磨带t的压接f以及摆动动作h之间的相互作用,进一步提高研磨精度以及研磨面t1的表面粗糙度,从而能够进行良好的研磨加工,并且,在该情况下,如图3所示,由于在上述压接机构b2具备能够引导上述研磨带t折返的压接部件b3,因此能够使研磨带t的研磨面t1可靠地压接f在被加工物w的被研磨面w1上,从而能够进行顺畅且良好的研磨加工,并且,在该情况下,由于上述研磨单元b的研磨结构是干式结构或者湿式结构,因此能够根据被加工物w的材质或者研磨加工的规格,选择使用在基材上固接了固定研磨粒的结构的研磨带t且不使用润滑剂的干式研磨结构、使用在基材上固接了固定研磨粒的结构的研磨带t且一边供给润滑剂一边进行研磨的湿式研磨结构、或者将未固接有固定研磨粒的纺布、无纺布、发泡体薄膜、植绒布用作研磨带t且供给包含游离研磨粒的研磨剂的湿式研磨结构,从而能够提高研磨加工的灵活性,相应地,能够进行良好的研磨加工。
51.而且,在该情况下,如图1、图2所示,由于具备能够保持及释放上述被加工物w的保持部c和对上述多关节型机器人a、上述研磨单元b以及保持部c进行同步控制的同步控制部d,因此能够通过上述保持部c可靠地保持及释放上述被加工物w,并且能够通过同步控制部d对上述多关节型机器人a、上述研磨单元b以及保持部c进行同步控制,从而能够进行良好的研磨加工。
52.并且,在该情况下,如图1、图2所示,由于上述保持部c具备能够保持上述被加工物w的保持部件32和能够保持及释放被加工物w的保持机构33,因此能够通过上述保持部件32可靠地保持上述被加工物w,并且能够通过保持机构33可靠地将被加工物w保持及释放在保持部件32上,从而能够进行良好的研磨加工,并且,在该情况下,如图2所示,由于负压吸附机构33a用作上述保持机构33,因此能够可靠地将被加工物w保持在保持部件32上,并且能够简化保持机构33的结构,并且,在该情况下,如图2所示,由于上述保持部件32水平回转自如地设置,在保持部件32的上表面设置有能够载置上述被加工物w的载置面32a,并且设置有使保持部件32连续性地或者间歇性地回转的水平回转机构34,因此除了上述多关节型机器人a的各种动作之外,还能够通过借助水平回转机构34形成的保持部件32的连续性的或者间歇性的回转动作来提高被加工物w的研磨加工的灵活性,从而能够应对各种被加工物w的种类或者各种规格,能够应对多品种且与专用机相比通用性较高,从而能够确保用途的灵活性以及扩大化。
53.并且,本发明并不限于上述实施方式例,多关节型机器人a、研磨单元b、带传送机构b1、压接机构b2、压接部件b3、保持部c、同步控制部d、摆动机构e、保持部件32、载置面32a、保持机构33、负压吸附机构33a、水平回转机构34等的结构、研磨带t的材质或者结构等可以适当进行变更而设计。
54.综上所述,能够充分达成预期的目的。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。