技术特征:
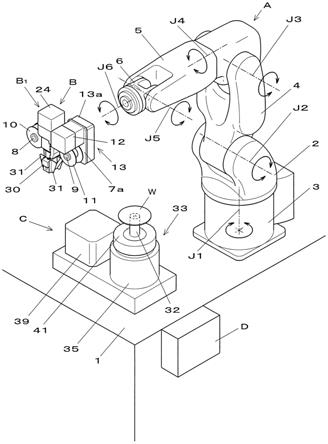
1.一种研磨机器人装置,其特征在于,具备:多关节型机器人;研磨单元,安装于该多关节型机器人的前端,研磨被加工物的被研磨面;以及同步控制部,对该多关节型机器人以及该研磨单元进行同步控制,所述研磨单元具备:研磨带,研磨所述被加工物的被研磨面;带传送机构,连续性地或者间歇性地传送该研磨带;以及压接机构,使该研磨带的研磨面压接于被加工物的被研磨面。2.根据权利要求1所述的研磨机器人装置,其特征在于,所述多关节型机器人是垂直多关节型机器人。3.根据权利要求1所述的研磨机器人装置,其特征在于,所述研磨机器人装置具备摆动机构,所述摆动机构使所述研磨带在与带传送方向正交的带宽度方向上进行摆动动作。4.根据权利要求1所述的研磨机器人装置,其特征在于,在所述压接机构具备能够引导所述研磨带折返的压接部件。5.根据权利要求1所述的研磨机器人装置,其特征在于,所述研磨单元的研磨结构是干式结构或者湿式结构。6.根据权利要求1所述的研磨机器人装置,其特征在于,所述研磨机器人装置具备:保持部,能够保持及释放所述被加工物;以及同步控制部,对所述多关节型机器人、所述研磨单元以及该保持部进行同步控制。7.根据权利要求6所述的研磨机器人装置,其特征在于,所述保持部具备:保持部件,能够保持所述被加工物;以及保持机构,能够保持及释放该被加工物。8.根据权利要求7所述的研磨机器人装置,其特征在于,负压吸附机构用作所述保持机构。9.根据权利要求7所述的研磨机器人装置,其特征在于,所述保持部件水平回转自如地设置,在该保持部件的上表面设置有能够载置被加工物的载置面,并且在所述研磨机器人装置中设置有使该保持部件连续性地或者间歇性地回转的水平回转机构。
技术总结
本发明涉及一种研磨机器人装置。通过多关节型机器人的末端执行器形成为采用了研磨单元的结构,能够应对多品种且与专用机相比通用性较高,能够确保用途的灵活性以及扩大化,而且,上述研磨单元具备带传送机构以及压接机构,因此能够通过研磨带的研磨面相对于被加工物的被研磨面的压接来对被加工物进行研磨加工。具备:多关节型机器人;研磨单元,安装于多关节型机器人的前端并研磨被加工物的被研磨面;以及同步控制部,对多关节型机器人以及研磨单元进行同步控制,上述研磨单元具备:研磨带,研磨上述被加工物的被研磨面;带传送机构,连续性地或者间歇性地传送研磨带;以及压接机构,使研磨带的研磨面压接于被加工物的被研磨面。面。面。
技术研发人员:细贝晃司 汤本裕
受保护的技术使用者:株式会社三信
技术研发日:2021.06.30
技术公布日:2022/3/15
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。