技术特征:
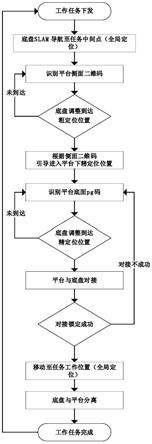
1.一种施工场地接驳方法,包括:s100全局移动定位:将移动底盘通过slam移动至任务中目标作业平台,读取作业平台坐标的一标定偏移向量v1,开始对接流程;s200对接:s210,移动底盘在该点位通过视觉识别作业平台侧边的二维码调整自身姿态,直到确认识别到master tag二维码信息,根据master tag的数据微调底盘的位姿到理想的对接进入位置,将移动底盘导航到标定的粗定位位置处;s220,根据移动底盘上的pgv传感器识别作业平台底面的pg码,调节移动底盘的位置直到设定的精定位位置阈值;s230,作业平台下降与移动底盘吻合,相互连接固定;s300移动分离:负载作业平台的移动底盘通过全局移动定位,slam导航到任务工作位置;移动底盘与作业平台之间脱离连接,作业平台升高至预定高度;移动底盘根据当前位置记录为此作业平台当前位置坐标上报至服务器,并生成移出路径,移动底盘分离、移出。2.如权利要求1所述的施工场地接驳方法,其特征在于:所述的s210步骤包括:s211,移动底盘在该点位通过视觉识别作业平台侧边的二维码组寻找master tag;s212,根据master tag二维码信息进一步调整移动底盘位置到设定的调节阈值;s213,移动底盘根据标定的偏移向量v1,移动进入作业平台下的粗定位位置。3.如权利要求1所述的施工场地接驳方法,其特征在于:所述的将底盘的位姿微调到理想的对接进入位置,采用的方法是:将计算角度偏差发送给移动底盘进行角速度调节,达到角度差的阈值后计算x方向的速度偏差发送给移动底盘,x方向速差达到阈值后调节完毕。4.如权利要求1所述的施工场地接驳方法,其特征在于:所述的s220调节移动底盘的位置到精定位位置,采用的方法是:向移动底盘发送角速度w,达到阈值后调节x方向误差;向移动底盘发送y方向的速度vy,达到阈值后调节y方向误差;向移动底盘发送x方向的线速度vx,达到阈值后调节完毕。5.如权利要求1所述的施工场地接驳方法,其特征在于:所述的s230是通过控制作业平台四个独立的升降电缸来调节作业平台的升降和保持水平。6.如权利要求1所述的施工场地接驳方法,其特征在于:所述的作业平台的控制包括:1)地脚着地控制、2)水平方向调平和3)升降控制,所述的地脚着地控制是指通过伺服电机恒扭矩来检测地脚伸出是否着地;所述的水平方向调平是指:当倾角x>0.1时,计算电缸补充移动距离,直到调整到设定的位置。7.如权利要求6所述的施工场地接驳方法,其特征在于:电缸补充移动距离的计算方法:设定abc是垂直三角形的三个点,b为直角所在的点位,ac是作业平台前后撑脚的距离,∠a是当前平台某个轴线上的倾斜角,计算补偿位移bc的高度,bc=fabs(tan(a)*ac);根据倾斜角大于0或者小于0,判断补偿a点还是c点处的电缸距离。一般是同轴处两个一起动作,两个轴都调整到水平范围内则平台完成调水平。8.如权利要求6所述的施工场地接驳方法,其特征在于:所述的升降控制,包括上升控制方法和下降控制方法,所述的上升控制方法包括:1)根据4个电缸当前位置,找到电缸伸出的最大值;2)上升到最高点平移距离=电缸行程-当前伸出最大的缸距离;3)电缸移动设置位置=电缸当前位置 上升到最高点平移距离;所述的下降控制方法:
1)根据4个电缸当前位置,找到电缸伸出的最小值;2)下降到最底点平移距离=当前伸出最小的缸距离;3)电缸移动设置位置=电缸当前位置-上升到最高点平移距离。9.一种施工场地接驳系统,包括:独立的移动底盘、独立的作业平台全局移动定位单元100,用于:将移动底盘通过slam移动至任务中目标作业平台,读取作业平台坐标的一标定偏移向量v1;对接单元200,用于将移动底盘与作业平台对接固定,其包括第一子单元210,用于:移动底盘在该点位通过视觉识别作业平台侧边的二维码调整自身姿态,直到确认识别到master tag二维码信息,根据master tag的数据微调底盘的位姿到理想的对接进入位置,将移动底盘导航到标定的粗定位位置处;第二子单元220,用于根据移动底盘上的pgv传感器识别作业平台底面的pg码,调节移动底盘的位置直到设定的精定位位置阈值;第三子单元230,用于作业平台下降与移动底盘吻合,相互连接固定;移动分离单元300,用于:负载作业平台的移动底盘通过全局移动定位,slam导航到任务工作位置;作业平台与移动底盘脱离连接,作业平台升高至预定高度;移动底盘根据当前位置记录为此作业平台当前位置坐标上报至服务器,并生成移出路径,移动底盘分离、移出。10.如权利要求9所述的施工场地接驳系统,其特征在于:所述的第一子单元210包括:第一模块211,用于移动底盘在该点位通过视觉识别作业平台侧边的二维码组寻找master tag;第二模块212,用于:根据master tag二维码信息进一步调整移动底盘位置到设定的调节阈值;第三模块213,用于:移动底盘根据标定的偏移向量v1,移动进入作业平台下的粗定位位置。11.如权利要求9所述的施工场地接驳系统,其特征在于:所述的第一子单元210,将底盘的位姿微调到理想的对接进入位置,采用的方法是:将计算角度偏差发送给移动底盘进行角速度调节,达到角度差的阈值后计算x方向的速度偏差发送给移动底盘,x方向速差达到阈值后调节完毕。12.如权利要求9所述的施工场地接驳系统,其特征在于:所述的第二子单元220调节移动底盘的位置到精定位位置,采用的方法是:向移动底盘发送角速度w,达到阈值后调节x方向误差;向移动底盘发送y方向的速度vy,达到阈值后调节y方向误差;向移动底盘发送x方向的线速度vx,达到阈值后调节完毕。13.如权利要求9所述的施工场地接驳方法,其特征在于:所述第三子单元230,用于控制作业平台四个独立的升降电缸来调节作业平台的升降和保持水平。14.如权利要求13所述的施工场地接驳系统,其特征在于:所述的第三子单元230包括:1)脚着地控制模块、2)水平方向调平模块和3)升降控制模块,所述的脚着地控制模块用于通过伺服电机恒扭矩来检测地脚伸出是否着地;所述的水平方向调平模块用于:当倾角x>0.1时,计算电缸补充移动距离,直到调整到设定的位置。15.如权利要求14所述的施工场地接驳系统,其特征在于:所述的水平方向调平模块,
其内设的电缸补充移动距离的计算方法如下:设定abc是垂直三角形的三个点,b为直角所在的点位,ac是作业平台前后撑脚的距离,∠a是当前平台某个轴线上的倾斜角,计算补偿位移bc的高度,bc=fabs(tan(a)*ac);根据倾斜角大于0或者小于0,判断补偿a点还是c点处的电缸距离。16.如权利要求14所述的施工场地接驳系统,其特征在于:所述的升降控制模块,包括上升控制模块和下降控制模块,所述的上升控制模块,用于:1)根据4个电缸当前位置,找到电缸伸出的最大值;2)上升到最高点平移距离=电缸行程-当前伸出最大的缸距离;3)电缸移动设置位置=电缸当前位置 上升到最高点平移距离;所述的下降控制模块,用于:1)根据4个电缸当前位置,找到电缸伸出的最小值;2)下降到最底点平移距离=当前伸出最小的缸距离;3)电缸移动设置位置=电缸当前位置-上升到最高点平移距离。17.一种实现施工场地接驳的装置或终端,包括一个或多个处理器、存储装置;存储装置,用于存储一个或多个程序;当所述的一个或多个程序被所述一个或多个处理器执行时,使得所述一个或多个处理器实现如权利要求1-8任一所述的一种施工场地接驳方法。18.一种计算机可读存储介质,其存储有计算机程序,该程序被处理器执行时实现权利要求1-8任一所述的一种施工场地的接驳方法。
技术总结
本发明提供了一种施工场地接驳方法,包括:S100全局移动定位:将移动底盘通过SLAM移动至任务中目标作业平台;S200对接:移动底盘在该点位通过视觉识别作业平台的二维码调整自身姿态到理想的对接进入位置;根据移动底盘上的pgv传感器识别作业平台底面的pg码,调节移动底盘的位置直到设定的精定位位置阈值;作业平台下降与移动底盘吻合,相互连接固定;S300移动分离:负载作业平台的移动底盘通过全局移动定位,SLAM导航到任务工作位置,移动底盘与作业平台之间脱离连接,移动底盘根据当前位置记录为此作业平台当前位置坐标上报至服务器,并生成移出路径,移动底盘分离、移出。本发明利用独立的移动底盘、多个作业平台即可进行多次的对接和分离,节省成本。节省成本。节省成本。
技术研发人员:胡雨辰 赵映重 张建 潘明财 曾泽江 孟浩
受保护的技术使用者:上海大界机器人科技有限公司
技术研发日:2020.09.12
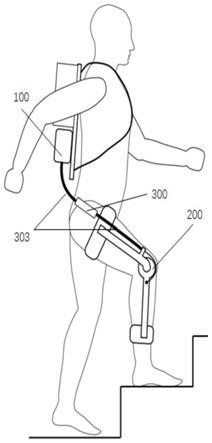
技术公布日:2022/3/14
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。