1.本发明属于下肢康复技术领域,涉及一种基于足底压力主动调速的下肢康复集成系统。
背景技术:
2.到2050年,全球范围内预计超过60岁的人数将从现今的6亿增加到20亿左右。而在老龄人口中,下肢运动障碍和中风偏瘫已经成为不得不重视的重要问题。此外,因疾病、交通事故导致的下肢运动障碍的患者越来越多。针对下肢运动障碍的患者,传统的康复方式大多采用人工辅助患者进行。这种康复训练方式恢复期长、效率低下,不能满足康复训练需求。下肢康复机器人摆脱了人力的束缚,通过带动患者的肢体按照设定好的运动模式进行锻炼,改变了传统繁琐的康复锻炼方式。因此,使用下肢康复机器人进行康复训练势在必行。
3.迄今为止应用于临床的下肢康复设备大多需要在进行康复训练前调整好模式和速度,在训练中无法改变,容易形成固有的运动模式,不利于下肢的恢复。此外,使用下肢康复设备训练时,患者所处的环境单一,康复训练过程过于机械化。这种枯燥的重复性训练往往令患者产生消极情绪,不利于进行康复训练,影响下肢康复训练的效率与效果。
4.针对上述问题,本发明设计了一种基于足底压力主动调速的下肢康复集成系统。此训练设备可以有效的提升患者在进行康复锻炼时的参与感和沉浸感,增加患者的训练兴趣。通过改变足底压力进行调速,患者可以主动调节下肢康复机器人的运动速度及对应的场景变化速度,化被动训练为主动训练。下肢康复机器人由患者主动控制而运动,这种方法很好的避免了形成固有的运动模式,提升训练乐趣,可极大提高患者参与康复训练的积极性与参与感。
技术实现要素:
5.本发明的目的就是提供一种基于足底压力主动调速的下肢康复集成系统。通过改变足底压力进行调速,患者可以主动调节下肢康复机器人的运动速度及对应的场景变化速度,化被动训练为主动训练。
6.本发明包括座椅式下肢康复机器人、足底压力采集调速系统、运动环境仿真系统;其特征在于:所述的座椅式下肢康复机器人包括座椅单元、下肢运动单元、控制单元、人机操作界面单元和主体框架;足底压力采集调速系统包括压力采集鞋垫和微型处理器;运动环境仿真系统包括环绕座椅放置的三块led屏幕;
7.所述的座椅式下肢康复机器人包括可调节座椅、由髋、膝、踝三关节和具有三个自由度连杆机构的下肢运动单元、基于多轴运动控制卡的控制单元、人机操作界面单元、主体框架;座椅通过电动推杆提供动力,电动推杆的一端通过转动副铰接在框架上,另一端则通过转动副铰接在座椅靠背;髋、膝、踝三个关节设置独立电机实现独立运动;关节之间通过多个连杆和传动部件连接,各个连杆之间通过转动副连接,髋关节的一端通过同步轮采用
过盈配合安装在轴套上,另一端与大腿部分固定连接;膝关节和踝关节分别与大腿、小腿连接,三个关节处使用螺栓拧紧;髋关节通过电机带动减速器,并通过带传动将动力传递给外骨骼腿部上侧部分,从而带动人体髋关节运动;膝关节与踝关节均通过电机带动减速器,直接将动力传递给人体小腿与足弓;运动控制单元通过多轴运动控制卡完成下肢外骨骼三个关节的协同运动;人机操作界面单元用于开机后各关节初始位置找零工作和单关节独立运动操作;
8.所述的足底压力采集调速系统包括压力采集鞋垫和微型处理器;压力采集鞋垫上布置有压力传感器,鞋垫固定在下肢运动单元的脚掌支撑上;运动中的足底压力集中于人体的大脚趾、第一跖骨、第五跖骨和足跟,压力传感器分布在人体脚部的这四个位置,压力采集单元采用左右各四路压力采集;八路压力采集做均值处理作为调速的触发信号;微型处理器通过对压力传感器的信号进行识别比对处理,然后对运动控制卡发出相应的指令,通过足底压力变化引起座椅运动速度的变化,实现下肢运动单元各关节的协调运动;患者足底压力改变时,压力信号传递给pc并在虚拟动画界面显示压力数据;同时传递给下肢康复椅的运动控制卡根据对应的设定速度进行调速;
9.述的运动环境仿真系统画面由三块led显示屏环绕在座椅式下肢康复机器人周边显示,令患者置身虚拟环境进行训练;屏幕上显示当前骑行速度和累计的里程;虚拟环境动画基于vrml建模语言设计,vrml通过插补器和软件中的时钟传感器完成动画;虚拟环境的插补器节点接受来自时钟传感器的时钟传输实现动画效果;时钟传感器的控制参数传递到插补器,根据预设的画面关键值和关键点,在动画渲染时自动进行线性插值完成虚拟动画的搭建;下肢康复座椅运动变速时单片机将变速信号传递给时钟控制器,产生变速参数令显示动画速度也发生相应变化,实现机器与画面的协调变速。
10.所述的足底压力采集调速系统设定有0.25m/s、0.5m/s、0.75m/s和1.0m/s四个调速档,分别对应0~22n、25~47n、50~72n、76~100n不同压力阈值下的骑行速度,每个档位之间保留2~3n的无效压力数值,以减弱康复训练期间足底压力跳变带来的系统紊乱影响,保证系统的流畅运行。
11.所述的足底压力采集调速系统压力信号的转化过程为:足底压力传感器将压力转化为阻值信号,经rfp转换模块的处理将阻值信号转换为电信号,并传递给stm32f103单片机,stm32f103单片机再将处理过的电信号传递给a/d转换模块,接着由a/d转换模块输出数字信号到串口通信模块,pc上位机接收到串口通信模块传递来的压力值后,会在虚拟动画界面显示具体压力数据。
12.所述的运动环境仿真系统设计有多种运动模式。
13.所述的座椅式下肢康复机器人的主体框架由7050航空铝材搭建。
14.所述的可调节座椅的椅背角度能够自行调整。
15.所述的大腿和小腿的连杆长度均可调。
16.所述的足底压力采集调速系统以我国男性平均体重66kg为压力阈值基准,用标定好的八路压力传感器对人体垂直站立在地面上和坐在康复椅上两种情况进行测量,得到的垂直站立时平均压力为100n;坐在康复椅上的平均压力为16n。
17.所述的髋关节的另一端采用螺栓与大腿部分连接;膝关节和踝关节与大腿、小腿采用键连接;鞋垫采用胶接固定在下肢运动单元的脚掌支撑上。
18.本发明结合足底压力主动调速和虚拟现实仿真环境,由座椅式下肢康复机器人的下肢运动单元带动患者进行康复训练。压力调速的档位设定能够满足患者自主的运动需求,化被动训练为主动训练。虚拟现实系统为主动训练提供沉浸式的运动仿真环境,骑行运动模式和划船运动模式分别满足对下肢异步运动和同步运动的功能需求。机械系统具有可拆卸机构,并且能够根据患者下肢的实际尺寸进行调整;根据患者需要的康复功能可以分别拆卸并单独作为髋关节、膝关节以及踝关节外骨骼康复设备使用。通过软硬件设置相应的限位保护实现对患者在康复训练中的保护,具有较高的安全性、可靠性。与led屏幕的结合使用,实现康复运动的数字化与可视化,有利于医师对患者康复的程度进行评估。
附图说明
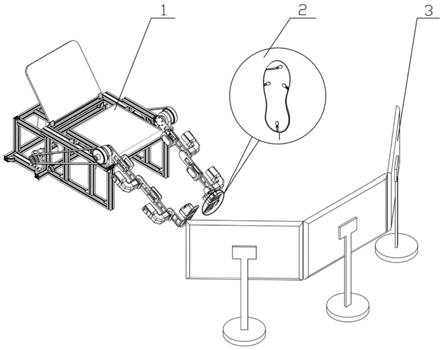
19.图1为本发明的整体结构示意图;
20.图2为本发明的下肢运动单元结构示意图;
21.图3为本发明的系统原理图;
22.图4为本发明的压力信号转化过程图;
23.图5为本发明的康复运动环境仿真示意图。
具体实施方式
24.如图1所示,一种基于足底压力主动调速的下肢康复集成系统,包括座椅式下肢康复机器人1、足底压力采集调速系统2和运动环境仿真系统3。座椅式下肢康复机器人包括座椅单元、下肢运动单元、控制单元、人机操作界面单元以及主体框架;足底压力采集调速系统霸啊哦哦阔压力采集鞋垫和微型处理器;运动环境仿真系统由环绕座椅放置的三块led屏幕组成,为康复训练者提供一种仿真环境,增强康复训练的趣味性和沉浸感。
25.座椅式下肢康复机器人包括可调节座椅、由髋、膝、踝三关节和具有三个自由度连杆机构的下肢运动单元,基于多轴运动控制卡的控制单元、人机操作界面单元、主体框架。座椅通过电动推杆提供动力,电动推杆的一端通过转动副铰接在主体框架上,另一端则通过转动副铰接在座椅靠背;如图2所示,下肢运动单元依靠髋关节第一支架5和髋关节第二支架9固定在主体框架上,髋关节4、膝关节12、踝关节15设置独立电机实现独立运动。关节之间的连接是由多个连杆和传动部件实现,各个连杆之间通过转动副连接,髋关节的一端通过第一同步轮6采用过盈配合安装在轴套上,另一端采用螺栓连接与大腿11部分相连。膝关节和踝关节采用键连接的方式与大腿11、小腿13连接。三个关节处使用螺栓拧紧来保证其稳定性。髋关节通过髋关节电机4带动减速器,并通过带传动7的方式将动力传递给外骨骼腿部上侧第二同步轮8部分,从而带动人体髋关节运动;膝关节与踝关节均通过膝关节电机12和踝关节电机15带动减速器,直接将动力传递给人体小腿13与脚掌支撑16部分。为了适配不同患者的下肢尺寸,大腿11和小腿13的连杆长度均可通过大腿长度调节螺栓10和小腿长度调节螺栓14进行调节。运动控制单元主要通过多轴运动控制卡完成下肢外骨骼三个关节的协同运动。人机操作界面单元用于开机后各关节初始位置找零工作和单关节独立运动操作;
26.足底压力采集调速系统包括压力采集鞋垫和微型处理器,在压力采集鞋垫的大脚趾、第一跖骨、第五跖骨和足跟相应位置布置有左右各四路压力传感器,此种方式布置可满
足压力采集稳定、压力集中的特点,鞋垫采用胶接的方式固定在下肢运动单元的脚掌支撑16上。八路压力采集做均值处理作为调速的触发信号。压力主动调速的实现是通过足底压力变化引起座椅运动速度的变化,微型处理器通过对压力传感器的信号进行识别比对处理,然后对运动控制卡发出相应的指令,实现下肢运动单元各关节的协调运动。患者足底压力改变时,压力信号一方面传递给pc并在虚拟动画界面显示压力数据;同时另一方面传递给下肢康复椅的运动控制卡根据设定的对应速度进行调速,其原理如图3所示。
27.足底压力采集调速系统设定有0.25m/s、0.5m/s、0.75m/s和1.0m/s四个调速档,分别对应0~22n、25~47n、50~72n、76~100n不同压力阈值下的骑行速度,既可满足初期缓慢运动,又能满后期调速控制。每个档位之间保留2~3n的无效压力数值,以减弱康复训练期间足底压力跳变带来的系统紊乱影响,保证系统的流畅运行。
28.如图4所示,足底压力采集调速系统压力信号的转化过程为:足底压力传感器将压力转化为阻值信号,经rfp转换模块的处理将阻值信号转换为电信号,并传递给stm32f103单片机,stm32f103单片机再将处理过的电信号传递给a/d转换模块,接着由a/d转换模块输出数字信号到串口通信模块,pc上位机接收到串口通信模块传递来的压力值后,会在虚拟动画界面显示具体压力数据。
29.运动环境仿真系统画面由三块led显示屏环绕在座椅式下肢康复机器人周边显示,包括地形设计、环境设计、树木湖泊等。场景选择分为林荫大道和环道海滨两种,令患者置身虚拟环境进行训练。同时为满足不同的康复训练需求,仿真环境设计有异步骑行和同步划船两种运动模式,并在屏幕上显示当前骑行速度和累计的里程,如图5所示。
30.康复训练者使用本系统时,首先需在人机操作界面对各关节初始位置进行归零处理,然后根据自己的康复训练需求选择合适的运动模式和虚拟运动环境。训练者坐在座椅上后,可自行调节靠椅的角度使自身处于舒适的运动状态。对于自主能力还不够的训练者,其坐在康复椅上时,足底压力较小不足以触发运动档位的变化,下肢运动单元会按照初始设定速度运行。同时在显示屏上的运动场景变化是比较缓慢的;当训练者能够自主的对脚底施加压力时,根据训练者施加压力的大小,足底压力采集调速系统会自行调整下肢运动单元的运行速度。足底压力大小的变化会带动下肢运动单元运行速度和显示屏虚拟场景变化的快慢。
31.综上,本发明基于足底压力主动调速,结合虚拟现实仿真环境,由座椅式下肢康复机器人的下肢运动单元带动患者进行康复训练。压力调速的档位设定能够满足患者自主的运动需求,化被动训练为主动训练,避免了形成固有的运动模式,提升训练乐趣,可极大提高患者参与康复训练的积极性与参与感。同时实现康复运动的数字化与可视化,有利于医师对患者康复的程度进行评估。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。