1.本发明涉及机器人技术,具体涉及一种智能消杀机器人。
背景技术:
2.申请号cn202110295994.4一种基于视觉的多传感器融合的智能防疫机器人及系统,包括上下设置的机器人上盖和机器人主体,机器人主体内设有旋转轴和驱动旋转轴的旋转电机,机器人上盖的中央设有用于旋转轴穿过的通孔,旋转轴穿过通孔的一端固定有传感器盒,传感器盒上设有红外摄像头和高清摄像头;机器人上盖上设有深度相机、单目相机和扬声器,机器人主体的下方设有两个主动轮和两个万向轮;机器人主体内设有控制系统,红外摄像头、高清摄像头、深度相机、单目相机、扬声器和主动轮均与控制系统连接。与现有技术相比,本发明具有对于发烧人员的识别和追踪能力更强等优点。
3.目前的防疫机器人,其定位方式均通过常规机器人上的各种环境信息采集传感器进行实现,例如摄像头、雷达、红外等,但是坐落于机器人上的传感器其检测范围受限于机器人的位置以及旁边物体的阻挡干扰,因此直接挪动常规的定位技术不能准确的绘制出防疫机器人的消杀路线。
技术实现要素:
4.针对现有技术存在的不足,本发明的目的在于提供一种可准确绘制消杀路线的智能消杀机器人。
5.为了实现上述目的,本发明采用以下技术方案予以实现:
6.一种智能消杀机器人,包括消杀机器人和室内辅助定位机构,
7.所述消杀机器人包括底座,所述底座内安装有fpga开发板,所述底座的底部设有移动机构,所述底座的侧壁安装有用于数据传输的天线,所述底座的顶部转动连接有二级旋转台,所述二级旋转台上安装有多个用于喷洒消毒液的喷洒管;所述fpga开发板分别与移动机构、天线和喷洒管电连接;
8.所述室内辅助定位机构包括室内摄像头、无线信号收发端和上位机,所述室内摄像头安装于建筑物内侧顶部用于摄取室内的平面图像信息,所述无线信号收发端用于收集所述室内摄像头摄取的平面图像信息并将其传输至上位机,所述上位机对平面图像信息进行区域划分并识别障碍物、预测障碍物行动轨迹,然后绘制路线指令并通过无线信号收发端下发至消杀机器人,所述消杀机器人通过天线接收信号并传递给fpga开发板,由fpga开发板按照路线指令控制移动机构和喷洒管分别进行移动和喷洒工作。
9.进一步地,所述喷洒管喷洒口处设有可吹动喷射出的消毒液以增加所述喷洒管喷洒范围的喷雾增程机构,所述喷雾增程机构固定安装于所述二级旋转台的顶部,并与所述fpga开发板电连接。
10.进一步地,所述消杀机器人还包括分别与所述fpga开发板电连接的机器人摄像头、雷达和红外传感器,所述机器人摄像头、雷达和红外传感器将采集的环境信息传输至
fpga开发板,所述fpga开发板根据环境信息和所述上位机下发的线路指令控制移动机构和喷洒管分别进行移动和喷洒工作。
11.进一步地,所述移动机构为由电机驱动的万向滑轮。
12.进一步地,所述喷雾增程机构包括固定安装于所述二级旋转台上的带球形凹槽的球座,所述球座内设有与球形凹槽匹配且与所述球座转动连接的球形连接头,所述球形连接头与连接杆的一端固定连接,所述连接杆的另一端固定连接有风机管套,所述风机管套内固定安装有电机,所述电机与fpga开发板电连接,所述电机的输出轴固定连接有扇叶,所述扇叶对准所述喷洒管的喷洒口设置。
13.进一步地,多个所述喷洒管沿所述二级旋转台的侧壁环向均匀设置。
14.进一步地,所述喷洒管朝上倾斜设置,所述喷洒管的喷洒口设置为朝上的斜口结构,所述喷雾增程机构位于所述喷洒管上方,且所述喷雾增程机构的风扇对准所述喷洒管的出口方向设置。
15.本发明与现有技术相比,具有如下技术效果:
16.本发明通过消杀机器人和室内辅助定位机构的配合,利用室内摄像头的位置优势,可获取完整的室内平面图像信息,准确的判断出障碍物例如行人或者栏杆等物体,进而绘制出准确的消杀路线。
17.进一步地,在室内辅助定位机构的精确定位下,再结合消杀机器人上的机器人摄像头、雷达和红外传感器实时获取消杀机器人周围的环境信息,可进一步准确感知周围物体,实现紧急避让,增加了智能消杀机器人的室内消杀效果。
附图说明
18.图1为本发明实施例所涉及的智能消杀机器人的原理框图;
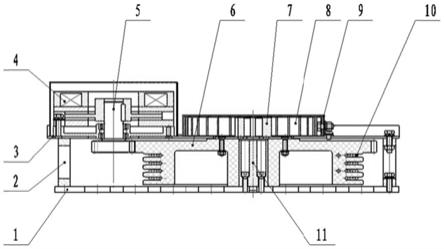
19.图2为本发明实施例所涉及的消杀机器人的结构示意图;
20.图3为本发明实施例所涉及的喷雾增程机构的结构示意图;
21.图4为本发明实施例所涉中上位机所绘制的路线示意图。
22.图中:1、底座;2、移动机构;3、天线;4、二级旋转台;5、喷洒管;6、喷雾增程机构;601、球座;602、球形连接头;603、连接杆;604、风机管套;605、扇叶;7、雷达;8、机器人摄像头;9、红外传感器。
具体实施方式
23.以下结合实施例对本发明的具体内容做进一步详细解释说明。
24.参照图1-3,本实施例提供一种智能消杀机器人,包括消杀机器人和室内辅助定位机构,
25.消杀机器人包括底座1,底座1内安装有fpga开发板,底座1的底部设有移动机构2,移动机构2为由电机驱动的万向滑轮,底座1的侧壁安装有机器人摄像头8、红外传感器9和用于数据传输的天线3,底座1的顶部转动连接有二级旋转台4,二级旋转台4的顶部中间位置安装有雷达7,二级旋转台4的侧壁靠近顶部的位置环向均匀设置有多个用于喷洒消毒液的喷洒管5,喷洒管5朝上倾斜设置,喷洒管5的喷洒口设置为朝上的斜口结构,喷洒管5的喷洒口处设有可吹动喷射出的消毒液以增加喷洒管5喷洒范围的喷雾增程机构6,喷雾增程机
构6位于喷洒管5上方并与二级旋转台4的顶部固定连接;具体的,喷雾增程机构6包括固定安装于二级旋转台4上的带球形凹槽的球座601,球座601内设有与球形凹槽匹配且与球座601转动连接的球形连接头602,球形连接头602与连接杆603的一端固定连接,连接杆603的另一端固定连接有风机管套604,风机管套604内固定安装有电机,电机与fpga开发板电连接,电机的输出轴固定连接有扇叶605,扇叶605对准喷洒管5的喷洒口设置;其中,fpga开发板分别与移动机构2、天线3、喷洒管5、喷雾增程机构6、雷达7、机器人摄像头8和红外传感器9电连接,fpga开发板可根据机器人摄像头8、雷达7和红外传感器9采集的环境信息控制移动机构2、喷洒管5和喷雾增程机构6的运行;
26.室内辅助定位机构包括室内摄像头、无线信号收发端和上位机,室内摄像头安装于建筑物内侧顶部用于摄取室内的平面图像信息,无线信号收发端用于收集室内摄像头摄取的平面图像信息并将其传输至上位机,上位机对平面图像信息进行区域划分并识别障碍物、预测障碍物行动轨迹,然后绘制路线指令并通过无线信号收发端下发至消杀机器人,消杀机器人通过天线3接收信号并传递给fpga开发板,fpga开发板根据上位机下发的线路指令以及机器人摄像头8、雷达7和红外传感器9采集到的环境信息控制移动机构2、喷洒管5和喷雾增程机构6分别进行移动、喷洒以及增加消毒液喷洒射程的工作。
27.本发明的工作原理:
28.本发明使用时,室内辅助定位机构中的室内摄像头用于摄取室内的平面图像信息,无线信号收发端用于收集室内摄像头摄取的平面图像信息并将其传输至上位机,上位机对平面图像信息进行区域划分并识别障碍物,如图4所示,将区域按照数字进行标记,根据行列的情况从左至右,从上至下依次进行标记,将障碍物所在区域和可能到达区域进行标记,然后根据预测障碍物行动轨迹并绘制路线指令下发至消杀机器人,消杀机器人通过天线3接收路线指令并传递给fpga开发板;同时,机器人摄像头8、雷达7和红外传感器9将采集到的环境信息传输给fpga开发板;fpga开发板根据上位机下发的线路指令以及机器人摄像头8、雷达7和红外传感器9采集到的环境信息控制移动机构2、喷洒管5和喷雾增程机构6分别进行移动、喷洒以及增加消毒液喷洒射程的工作,使消杀机器人可避开障碍物,按照路线指令进行消杀工作。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。