技术特征:
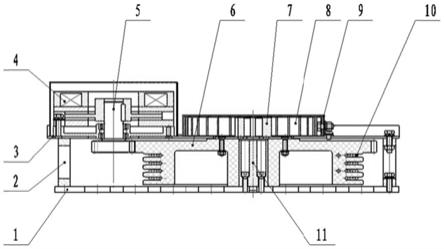
1.一种智能消杀机器人,其特征在于,包括消杀机器人和室内辅助定位机构,所述消杀机器人包括底座(1),所述底座(1)内安装有fpga开发板,所述底座(1)的底部设有移动机构(2),所述底座(1)的侧壁安装有用于数据传输的天线(3),所述底座(1)的顶部转动连接有二级旋转台(4),所述二级旋转台(4)上安装有多个用于喷洒消毒液的喷洒管(5);所述fpga开发板分别与移动机构(2)、天线(3)和喷洒管(5)电连接;所述室内辅助定位机构包括室内摄像头、无线信号收发端和上位机,所述室内摄像头安装于建筑物内侧顶部用于摄取室内的平面图像信息,所述无线信号收发端用于收集所述室内摄像头摄取的平面图像信息并将其传输至上位机,所述上位机对平面图像信息进行区域划分并识别障碍物、预测障碍物行动轨迹,然后绘制路线指令并通过无线信号收发端下发至消杀机器人,所述消杀机器人通过天线(3)接收信号并传递给fpga开发板,由fpga开发板按照路线指令控制移动机构(2)和喷洒管(5)分别进行移动和喷洒工作。2.如权利要求1所述的智能消杀机器人,其特征在于,所述喷洒管(5)喷洒口处设有可吹动喷射出的消毒液以增加所述喷洒管(5)喷洒范围的喷雾增程机构(6),所述喷雾增程机构(6)固定安装于所述二级旋转台(4)的顶部,并与所述fpga开发板电连接。3.如权利要求1所述的智能消杀机器人,其特征在于,所述消杀机器人还包括分别与所述fpga开发板电连接的机器人摄像头(8)、雷达(7)和红外传感器(9),所述机器人摄像头(8)、雷达(7)和红外传感器(9)将采集的环境信息传输至fpga开发板,所述fpga开发板根据环境信息和所述上位机下发的线路指令控制移动机构(2)和喷洒管(5)分别进行移动和喷洒工作。4.如权利要求1所述的智能消杀机器人,其特征在于,所述移动机构(2)为由电机驱动的万向滑轮。5.如权利要求2所述的智能消杀机器人,其特征在于,所述喷雾增程机构(6)包括固定安装于所述二级旋转台(4)上的带球形凹槽的球座(601),所述球座(601)内设有与球形凹槽匹配且与所述球座(601)转动连接的球形连接头(602),所述球形连接头(602)与连接杆(603)的一端固定连接,所述连接杆(603)的另一端固定连接有风机管套(604),所述风机管套(604)内固定安装有电机,所述电机与fpga开发板电连接,所述电机的输出轴固定连接有扇叶(605),所述扇叶(605)对准所述喷洒管(5)的喷洒口设置。6.如权利要求5所述的智能消杀机器人,其特征在于,多个所述喷洒管(5)沿所述二级旋转台(4)的侧壁环向均匀设置。7.如权利要求5所述的智能消杀机器人,其特征在于,所述喷洒管(5)朝上倾斜设置,所述喷洒管(5)的喷洒口设置为朝上的斜口结构,所述喷雾增程机构(6)位于所述喷洒管(5)上方,且所述喷雾增程机构(6)的风扇(605)对准所述喷洒管(5)的出口方向设置。
技术总结
本发明公开了一种智能消杀机器人,包括消杀机器人和室内辅助定位机构,消杀机器人包括底座、FPGA开发板、移动机构、用于数据传输的天线和喷洒管,FPGA开发板分别与移动机构、天线和喷洒管电连接;室内辅助定位机构包括室内摄像头、无线信号收发端和上位机,室内摄像头安装于建筑物内侧顶部用于摄取室内的平面图像信息,无线信号收发端用于收集平面图像信息并将其传输至上位机,上位机对平面图像信息进行区域划分并识别障碍物、预测障碍物行动轨迹,然后绘制路线指令并通过无线信号收发端下发至消杀机器人,消杀机器人通过天线接收信号并传递给FPGA开发板,由FPGA开发板按照路线指令控制移动机构和喷洒管分别进行移动和喷洒工作。作。作。
技术研发人员:桑振 付向阳 贺雪梅 刘凡 徐家悦
受保护的技术使用者:陕西科技大学
技术研发日:2021.12.20
技术公布日:2022/3/8
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。