1.本发明涉及一种机器人标定方法,具体涉及一种几何误差与非几何误差相结合的机器人标定方法,是针对有限样本下的机器人运动学精度的标定方法,属于工业机器人技术领域。
背景技术:
2.机器人作为典型的机电设备,在加工、装配、医疗等领域具有广泛的应用。在机器人的实际应用中,定位精度是一个重要的指标。随自动化智能化技术的发展,对机器人的定位精度提出更高的要求,尤其在管道,钻孔,焊接等领域。
3.但由于加工公差、装配误差、柔性变形等影响,机器人的实际模型与名义模型不一致,导致机器人的绝对定位精度较低。
4.目前,机器人在标定过程中,一般都采用带有平行四边形的机械臂来完成标定,但是由于平行四边形的机械臂在生产、加工和装配过程中会存在大量的几何误差,而且在标定过程中,还存在非几何误差,导致机器人标定绝对定位精度低的问题,也给运动的求解带来困难。
技术实现要素:
5.本发明的目的是为了解决现有机器人中的平行四边形机械臂在标定时同时存在几何误差和非几何误差,导致机器人标定误差大的问题。进而提供一种几何误差与非几何误差相结合的机器人标定方法。
6.本发明的技术方案是:一种几何误差与非几何误差相结合的机器人标定方法,包括以下步骤:
7.步骤一:根据机械臂构型基于mdh模型和机械臂的构型参数建立坐标系及运动学矩阵坐标系及运动学矩阵;
8.步骤二:建立平行四边形的误差模型及平行四边形末端位置的运动矩阵;
9.步骤三:根据奇异值分解的方法剔除耦合参数,辨识几何参数;
10.步骤四:使用粒子群算法计算出最小二乘支持向量机的最优参数后,补偿由于非几何误差引起的剩余位置误差。
11.本发明与现有技术相比具有以下效果:
12.本发明首先采用mdh模型建立了几何误差模型;然后使用奇异值分解的方法对耦合参数进行处理,以提高辨识的精度和效率;最后使用粒子群寻算法优化参数后的lssvr,补偿由于非几何误差引起的剩余位置误差,提高有限样本估计时的准确性。
13.也就是说本发明同时减少了机器人机械臂的平行四边形机构在标定过程中存在的几何误差和运动过程中存在的非几何误差,通过采用粒子群寻优最小二乘支持向量机的算法,在有限样本数量的情况下提高了机器人运动学的精度。
附图说明
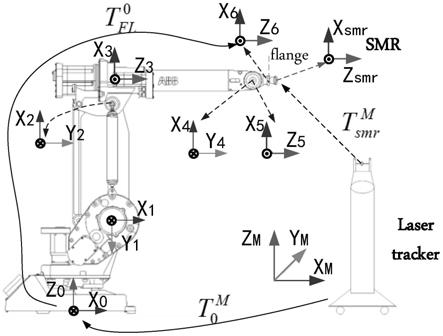
14.图1为本发明带平行四边形的冗余机械臂的结构与坐标示意图;
15.图2为本发明带平行四边形的冗余机械臂的四边形机构示意图;
16.图3为本发明带平行四边形的冗余机械臂标定和补偿工作流程图;本图中的几何参数辨识部分展示的是实际应用时控制器的流程,省略了本发明理论公式推导以及剔除耦合参数部分。
17.图4为本发明带平行四边形的冗余机械臂逆运动学工作流程图;其中,本发明的标定方法部分省略了逆运动学推导部分,因为逆运动学推导部分为现有技术。但作为本发明完整的技术方案,在实际标定时,可以采用逆运动学的计算,该过程与本发明的标定方法共同组成完整的方案,故补充了逆运动学工作流程图。
18.图5为具体实施例实验结果对比图。
具体实施方式
19.为使本发明实施例的目的、技术方案和优点更加清楚,下面将结合本发明实施例,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
20.具体实施方式一:结合图1至图4说明本实施方式,本实施方式的一种几何误差与非几何误差相结合的机器人标定方法,它包括以下步骤:
21.步骤一:根据机械臂构型基于mdh模型和机械臂的构型参数建立坐标系及运动学矩阵坐标系及运动学矩阵;
22.步骤二:建立平行四边形的误差模型及平行四边形末端位置的运动矩阵;
23.步骤三:根据奇异值分解的方法各个关节之间的耦合参数,辨识几何参数;
24.步骤四:使用粒子群算法计算出最小二乘支持向量机的最优参数后,补偿由于非几何误差引起的剩余位置误差。
25.本发明解决了现有技术中对机器人的几何误差与非几何误差建模分别建模补偿,以减小机器人的末端定位误差。本发明具体使用了基于粒子群寻优与最小二乘支持向量机相结合的标定方法分别减小机器人的几何误差与非几何误差提高机器人的绝对定位精度,提高有限样本估计时的准确性和稳健性。
26.具体实施方式二:结合图1和图2说明本实施方式,本实施方式的步骤一中的构型参数坐标系为:
27.第1关节坐标系x1z1y1由基坐标系x0z0y0绕x0轴旋转90
°
;
28.第2关节坐标系x2z2y2由第1关节坐标系绕z1轴旋转90
°
,并沿y1轴移动a1;
29.第3关节坐标系x3z3y3由第2关节坐标系绕x2轴旋转90
°
,并沿x2轴移动a2;
30.第4关节坐标系x4z4y4由第3关节坐标系绕x3轴旋转90
°
,并沿z3轴移动a3;
31.第5关节坐标系x5z5y5由第4关节坐标系绕x4轴旋转90
°
,并沿y4轴移动a4;
32.第6关节坐标系由第5关节坐标系沿y5移动a5;
33.所有关节都以各自的z轴为旋转中心转动。
34.如此设置,可以减少平行四边形机构的几何误差对末端定位误差的影响。其它组
成和连接关系与具体实施方式一相同。
35.具体实施方式三:结合图1至图4说明本实施方式,本实施方式的步骤一的运动学矩阵坐标系及运动学矩阵包括以下步骤:
36.步骤一一:齐次坐标变换矩阵的构建;
37.根据机械臂相邻关节之间的其次变换方程得出机械臂末端坐标系相对于基坐标系的齐次坐标变换矩阵公式(1):
[0038][0039][0040]
其中,表示相邻两连杆坐标系的其次坐标变换矩阵,所述连杆为相邻两个关节之间的连接件;关节角度,关节偏置,连杆长度,连杆扭转和hayati参数分别为θi,di,ai,αi和βi;表示法兰坐标系与工具坐标系之间的齐次转换矩阵;
[0041]
如果相邻两关节平行或者近似平行,那么di=0,βi≠0,否则βi=0,di≠0;
[0042]
步骤一二:法兰坐标系的构建;
[0043]
在实际中,法兰坐标系难以准确测量,因此通过以下方程确定:
[0044][0045]
表示从法兰坐标系到球形安装靶球的转换;
[0046]
是球形安装靶球到工具坐标系的固定转换,在构型中准确测量;
[0047]
从测量坐标系到smr的变换矩阵为:
[0048][0049][0050]
在这里,表示smr在测量坐标系下的位置;
[0051]
表示从测量坐标系到机器人基坐标系的转换矩阵;
[0052]
在标定前,应该被初步测量,通过cad模型初步确定,在标定中,对和进行同步辨识。如此设置,只需一次辨识即可,可以减少累计多次辨识以及测量误差所带来的影响。其它组成和连接关系与具体实施方式一或二相同。
[0053]
具体实施方式四:结合图1至图4说明本实施方式,本实施方式的步骤二中包括以下步骤:
[0054]
步骤二一:建立平行四边形的误差模型;
[0055]
平行四边形机构在平面o1x1y1上投影,并构建闭环约束方程如下所示:
[0056][0057][0058]
在这里cθi和sθi分别是cos(θi)和sin(θi)的简写;θ
i,j
是θi θj的简写;l
a2
,l
p3
,l
p4
是平行四边形机构的杆长
[0059]
步骤二二:平行四边形末端位置的运动矩阵;
[0060]
根据平行四边形的定义,得到θ3=θ
a2
θ
p3
θ
p4-θ
2-π,通过对公式(6)进行微分得到被动关节的角度θ
p3
,θ
p4
与θ2θ
a2
,a2,l
a2
,l
p3
,l
p4
之间的线性化关系:
[0061][0062]
得到:
[0063]
δθ3=g1δθ2 g2δθ
a2
g3δa2 g4δl
a2
g5δl
p3
g6δl
p4
ꢀꢀꢀ
(8)
[0064]
其中,考虑到平行四边形的约束条件l
a2
=l
p4
与θ3=-θ2 θ
a2
,对方程(8)简化得到:
[0065]
g1=-g2=-1,
[0066]
带平行四边形机构的机器人的运动学模型如方程(5)所示,末端位置误差与几何参数之间的关系可以表示为:
[0067]
δx=jb*δb jr*δq j
t
*δt
ꢀꢀꢀ
(10)
[0068]
δx3×1=j3×
36
*δg
36
×1ꢀꢀꢀ
(11)
[0069]
在这里δx是末端位置误差为3*1向量,
[0070]
δb是基座标系误差向量,
[0071]
δq是机器人参数误差向量,
[0072]
δt是工具座标系误差向量,δb=[δx0,δy0,δz0,δα0,δβ0,δθ0]
t
,δt=[δx
t
,δy
t
,δz
t
]
t
。δq=[δθ
t
,δd
t
,δa
t
,δα
t
,δβ
t
]
t
,在这里δθ=[δθ1,l,δθ6]
t
,δd=[δd1,δd3,l,δd6]
t
,δa=[δa1,l,δa6]
t
,δα=[δα1,l,δα6]
t
,δβ=[δβ2]
t
;
[0073]ji
是对应的辨识雅克比矩阵;
[0074]
基座标系的误差参数所对应的雅克比矩阵为:
[0075]jx0
=[xm],j
y0
=[ym],j
a0
=[xm×
p
smr
],j
β0
=[y'm×
p
smr
]
[0076]jz0
=[z0],j
θ0
=[z”m
×
p
b,smr
]
ꢀꢀꢀ
(12)
[0077]
其中xi,yi,zi表示测量坐标系{i}的方向向量,坐标系{m'}是坐标系{m}绕xm轴旋转α0后所形成的坐标系,y'm是坐标系{m'}沿y轴的方向向量;
[0078]
{m”}表示坐标系{m'}绕y'm轴旋转β0后形成坐标系,向量p
b,smr
将基座标系的原点连接到末端工具坐标系的原点;
[0079]
机器人的误差参数对应的雅克比矩阵为:
[0080]jθi
=[z
i-1
×
p
i-1,n
],j
di
=[z
i-1
],j
ai
=[xi'],j
αi
=[xi'
×
p
i,n
],j
βi
=[yi×
p
i,n
] (13)
[0081]
在这里,zi和yi表示连杆坐标系{i}沿z和y轴的方向向量。坐标系{i'}是连杆坐标系{i-1}绕z
i-1
轴旋转θi之后形成的坐标系,xi'是坐标系{i'}沿x轴的方向向量。向量p
i,n
将连杆{i}坐标系的原点连接到末端工作坐标的原点;
[0082]
其中,将方程(8)集成到方程(11)中得到平行四边形误差参数所对应的雅克比矩阵:
[0083][0084][0085]
其中,平行四边形误差参数所对应的雅克比矩阵;
[0086]
法兰坐标系的误差参数所对应的雅克比矩阵计为:
[0087]jxsmr
=[x
fl
],j
ysmr
=[y
fl
],j
zsmr
=[z
fl
]
ꢀꢀꢀ
(15)
[0088]
x
fl
,y
fl
,,z
fl
表示沿法兰坐标系x,y,z轴的方向向量。
[0089]
其它组成和连接关系与具体实施方式一、二或三相同。
[0090]
具体实施方式五:结合图1至图4说明本实施方式,本实施方式的步骤三中包括以下步骤:
[0091]
步骤三一:剔除耦合参数;
[0092]
将公式(10)简写为δx=j
·
δg,并使h=[j
t
·
j],通过对h进行奇异值分解得到:
[0093]
(16)
[0094]
其中,u和v都是酉矩阵,并且满足u
t
u=i,v
t
v=i;
[0095]
σ=diag(σ1,σ2,k,σr)代表主对角线上不为零的对角阵,σ1,σ2,k,σr是h矩阵的特征值,r是h矩阵的秩(r≤36),因此,有36-r个参数是线性相关的;
[0096][0097]
由于h是对称矩阵且v
t
=u-1
,v是旋转矩阵,那么v
t
·
δg等于δg,通过行初等变换得到线性相关的系数;
[0098]
在此基础上使用模型分析的方法,确定非线性耦合参数之间的表达式,并且通过仿真验证了耦合参数关系方程式的正确性,根据以上的分析,得到耦合参数:
[0099][0100]
其中,x=a6 x
t
,之后将耦合参数δθ1,δd1,δl
p4
,δa5,δα5,δθ6,δx
t
,δz
t
从标定模型中去除;
[0101]
步骤三二:辨识几何参数;
[0102]
通过对n个机器人关节配置下的末端位置进行测量,建立3
×
n个方程辨识机器人的几何参数,为使系统的线性化误差最小,采用迭代最小二乘法(ils)辨识模型的参数:
[0103]gk
=g
k-1
δgkꢀꢀꢀ
(19)
[0104]
其中,gk是在第kth次迭代时更新的参数,δgk是第kth次迭代时的参数误差,使用如下的方程表示:
[0105]
δgk=[j
ktjk
]-1jkt
δpkꢀꢀꢀ
(20)
[0106]
其中,是在第k次迭代时末端的位置误差矩阵,是其对应的辨识雅克比矩阵,直到δgk的值小于ε,迭代过程终止。
[0107]
如此设置,循环迭代(最小二乘法)可以最小化线性误差。其它组成和连接关系与具体实施方式一、二、三或四相同。
[0108]
具体实施方式六:结合图1至图4说明本实施方式,本实施方式的步骤四中的使用粒子群算法计算出最小二乘支持向量机的最优参数的过程如下:
[0109]
步骤四一:设定最小二乘支持向量机的最优目标;
[0110]
训练样本为(xi,yi)分别是最小二乘支持向量机的输入输出向量,最小二乘支持向量机模型描述为:
[0111]
y(x)=ω
t
φ(x) b
ꢀꢀꢀ
(21)
[0112]
其中ω是权重向量,φ(x)是非线性函数,b是曲线的偏差,最小二乘支持向量机的优化目标为:
[0113][0114]ei
是第ith样本的逼近误差,γ是正则化参数,用于避免过拟合问题;
[0115]
步骤四二:确定最小二乘支持向量机函数;
[0116]
将拉格朗日乘子αi引入方程式(21),优化问题变为:
[0117][0118]
其中,αi是每个xi的拉格朗日乘子,对公式(23)中变量ω,b,ei分别求偏导数,并令偏导数等于零得到如下的方程:
[0119][0120][0121][0122][0123]
在消去ei和ω得到:
[0124][0125]
在这里i=[1,1,k,1]
t
,α=[α1,α2,k,αn]
t
,其中,k(xi,xj)代表核函数,在高维空间中进行内积运算;其中,y=(y1,y2,k,yn)
t
,因此,对于新的
样本x,最小二乘支持向量机的输出为:
[0126][0127]
选择径向基核函数作为最小二乘支持向量机的核函数,回归函数如下所示:
[0128][0129]
其中,σ为核函数的参数;
[0130]
训练好的最小二乘支持向量机回归函数简写为:lssvr(θi),θi=[θ1,l,θ6]。
[0131]
如此设置,将机器人的各关节角度作为影响机器人位置精度的要素,并作为最小二乘支持向量机的输入,对剩余定位误差进行预测,可以减少非几何误差。其它组成和连接关系与具体实施方式一至五中任意一项相同。
[0132]
具体实施方式七:结合图1至图4说明本实施方式,本实施方式的步骤四中的补偿由于非几何误差引起的剩余位置误差的过程如下:
[0133]
步骤1:完成之前标定步骤后,在机器人工作空间内随机取200组点,并让机器人按照取点位置运动,记录此时机器人仍具有的剩余位置误差作为样本数据,将样本数据的80%作为训练样本,20%的样本数据作为测试样本;
[0134]
步骤2:利用训练好的最小二乘支持向量机对非几何误差进行预测;
[0135]
设置最小二乘支持向量机中因子c和核参数σ的范围,并根据该范围随机初始化粒子群;
[0136]
步骤3:设置优化迭代次数为200次,加速度因子c1和c2,最大惯性权值w
max
为0.8,最小惯性权值w
min
为0.5,随机权值方差平均为0.2,根据公式(29)自适应更新权值;
[0137][0138]
其中,f为粒子的当前值;f
avg
和f
min
分别为粒子群中的均值和最小值,w
min
和w
max
分别为最大和最小权重系数;
[0139]
步骤4:根据公式(30)计算每个粒子的适应度值,然后根据适应度值确定当前粒子的个体最优值和种群最优值;
[0140][0141]
其中,n为粒子数量,f(xi)为每次粒子群寻优后输出结果,yi为样本期望结果;
[0142]
步骤5:根据公式(31)和公式(32)迭代更新粒子的位置和速度,生成新一代的种群;
[0143][0144][0145]
其中,vi表示第i个粒子的速度;pi表示本次计算后第i个粒子的最佳位置;xi表示第i个粒子的位置;w(s)是惯性权系数;d是解空间的维数,c1和c2是加速度因子,它们是非负常数;r1和r2是两个介于(0,1)之间的随机数,增加了搜索的随机性,k表示当前迭代次数;
[0146]
步骤6:重新计算新种群中每个粒子的适应度值,然后与历史个体的最优位置和种群的最优位置进行比较;如果适应度函数的值大于当前的最优值,那么将当前的参数(支持向量机的c和σ参数)替换最优的参数,否则保持原参数不变;
[0147]
步骤7:预设最大迭代次数和适应度值的下限,验证每次迭代后的结果是否满足预设最大迭代次数和适应度值的下限要求,如果条件没有满足则终止计算,回到步骤4重新计算每个粒子的适应度值;如果条件得到满足,程序结束,获得全局最优,即最优c和σ;
[0148]
步骤8:将得到的粒子群最优位置(c,σ)分配到最小二乘支持向量机的预测模型中,得到最优预测模型;
[0149]
步骤9:采用三个最小二乘支持向量机分别对剩余位置误差δp
x
,δpy,δpz进行预测,最小二乘支持向量机的输入数据为机器人的关节角度集合θi=[θ1,l,θ6],输出数据为几何误差补偿后的剩余位置误差。
[0150]
如此设置,以粒子群寻优算法可以获得比人工设定的参数更优的参数,使最小二乘支持向量机对非几何误差的补偿达到最优效果。其它组成和连接关系与具体实施方式一至六中任意一项相同。
[0151]
具体实施例:
[0152]
标定系统的设备包含abb带平行四边形机构的irb1410机器人,leica at960激光跟踪仪(位置精度
±
15um 6um/m)和球形安装靶球。
[0153]
irb1410的重复定位精度为
±
50um。
[0154]
使用轴线拟合对进行初步确定。
[0155]
通过cad模型对进行初步确定。
[0156]
在机器人最大可测量的空间生成400组的关节配置并测量对应的末端位置。
[0157]
为了进行几何参数的辨识、lssvr的训练和补偿效果评估,分别选取100,200和100组涵盖整个测量空间的样本称为s1,s2,s3,对应的末端位置分别为p
s1
,p
s2
,p
s3
。
[0158]
其中,s1用于几何参数的辨识,s2用于lssvr的训练,s3用于标定后精度的评估与验证。通过计算100组实验结果数据的平均值、最大值和均方差,标定各步骤后机器人的末端定位精度如下表格所示。
[0159] 平均值最大值均方差名义模型1.09672.14550.354辨识0.13310.35140.076lssvr0.08190.18110.0322pso_lssvr0.07230.16020.0317
[0160]
通过对以上数据内容的分析可知,本技术相比于现有技术在机器人标定方面具有更高的精度提升以及迭代计算时间短的优点。
[0161]
以上实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的精神和范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。