1.本发明涉及消防机械人领域,具体涉及一种可以实现大角度爬坡越障的消防机器人底盘。
背景技术:
2.随着社会经济的迅猛发展,建筑和企业生产的特殊性,导致化学危险品和放射性物质泄漏以及燃烧、爆炸、坍塌的事故隐患增加,事故发生的概率也相应提高。一旦发生灾害事故,消防员面对高温、黑暗、有毒和浓烟等危害环境时,若没有相应的设备贸然冲进现场,不仅不能完成任务,还会徒增人员伤亡。针对这种情况,消防机器人应运而生,消防机器人是特种机器人的一种,在灭火和抢险救援中愈加发挥举足轻重的作用。
3.火灾现场环境复杂,为了灭火、救援,消防机器人需要不断爬坡、越过各种障碍。但是现有的消防机器人底盘爬坡角度比较小,最大只能爬35
°
左右的坡,最大越障高度200mm左右,这对于机器人在一些特殊环境中作业造成了限制。
技术实现要素:
4.本发明提供了一种可以实现大角度爬坡越障的消防机器人底盘,其目的在于提高消防机械人爬坡及越障能力。
5.为实现上述目的,本发明的技术方案为:
6.本发明提供了一种可以实现大角度爬坡越障的消防机器人底盘,包括底盘壳体,设置在所述底盘壳体内的电机和输入端与所述电机输出轴相连的电机减速器,设置在所述底盘壳体左侧的左行走结构,设置在所述底盘壳体右侧的右行走结构。所述左行走结构与所述右行走结构对称相同。
7.所述左行走结构与所述右行走结构均包括履带,用于带动所述履带行走的主动轮组,固定在所述底盘壳体一侧的轮组安装板,以及设置在所述轮组安装板上的用于支撑消防机器人整体重量的若干负重轮组、用于托起所述履带的若干拖带轮组和用于履带导向的导向轮组。
8.所述主动轮组包括叉型支架、主动轴、主动链轮、被动链轮、带动驱动轮、从动轴和链条。所述叉型支架包括叉柄和匚字型固定架,所述叉柄上设置有轴孔,所述叉柄通过与所述轴孔共轴的主动轮轴承可转动的设置在所述底盘壳体的一侧。所述匚字型固定架固定在所述叉柄底端,所述叉柄顶端可转动的固定在与所述主动轮组相邻的负重轮组上并与此负重轮组形成联动。
9.所述主动轴的一端与所述电机减速器的输出端相连,另一端穿过所述主动轮轴承并伸出所述轴孔,所述主动链轮固定在所述主动轴上。所述被动链轮与带动驱动轮均固定在所述从动轴上,所述从动轴可转动的固定在所述匚字型固定架上。所述主动链轮通过所述链条与所述被动链轮连接,所述带动驱动轮驱动所述履带行走。
10.进一步,所述匚字型固定架的两侧分别设置有履带松紧调节结构。
11.进一步,所述履带松紧调节结构包括松紧调节固定块、调节螺杆、调节螺栓、从动轴固定板和设置在所述匚字型固定架上的腰型孔。
12.进一步,所述负重轮组包括镰刀型支架、第一减震机构、第二减震机构、第一负重轮、第一转动杆和第一固定杆。
13.进一步,所述拖带轮组包括l型支架和拖带轮。
14.进一步,所述导向轮组包括t型支架、导向轮、第二负重轮、第二转动杆、第二固定杆和第三减震机构。
15.本发明所达到的有益效果为:
16.本发明相比于现有消防机器人底盘,通过主动轮组增加了履带的接地长度,且主动轮组与相邻负重轮组相互关联,这些使得机器人本身的爬坡及越障能力大大提高。
17.经测试,本发明最大能够爬42
°
左右陡坡,越过高度300mm以上的障碍物,使得机器人的工作环境适应能力大大提升,一般的楼梯都可以轻松上下。
附图说明
18.图1是本发明立体图。
19.图2是本发明俯视图。
20.图3是本发明侧视图。
21.图4是去除履带后行走结构立体图。
22.图5是主动轮组立体图。
23.图6是主动轮组俯视图。
24.图7是叉型支架局部放大图,已隐藏从动轴固定板。
25.图8是负重轮组立体图。
26.图9是负重轮组侧视图。
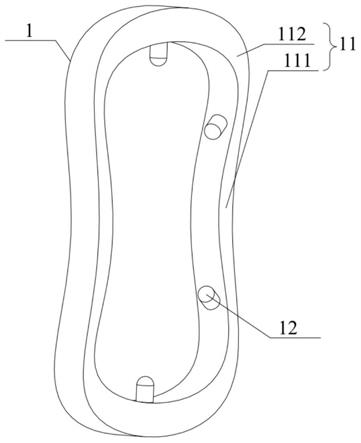
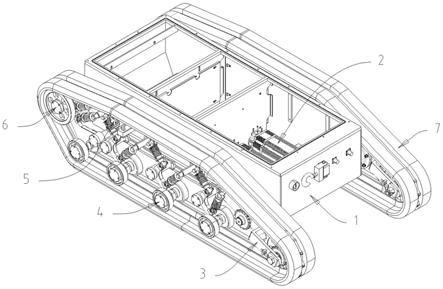
27.图10是拖带轮组立体图。
28.图11是拖带轮组侧视图。
29.图12是导向轮组立体图。
30.图13是导向轮组侧视图。
31.图中,1、底盘壳体;2、电机;21、电机减速器;3、主动轮组;31、主动链轮;32、链条;33、叉型支架;331、被动链轮;332、带动驱动轮;333、松紧调节固定块;334、调节螺杆;335、调节螺栓;336、从动轴;337、从动轴固定板;338、腰型孔;34、主动轮轴承;4、负重轮组;41、镰刀型支架;42、第一减震机构;43、第二减震机构;44、第一负重轮;45、第一转动杆;46、第一固定杆;5、拖带轮组;51、l型支架;52、拖带轮;6、导向轮组;61、t型支架;62、导向轮;63、第二负重轮;64、第二转动杆;65、第二固定杆;66、第三减震机构;7、履带;8、轮组安装板。
具体实施方式
32.为便于本领域的技术人员理解本发明,下面结合附图说明本发明的具体实施方式。
33.如图1~3所示,本发明提供了一种可以实现大角度爬坡越障的消防机器人底盘,包括底盘壳体1,设置在所述底盘壳体1内的电机2和电机减速器21,设置在所述底盘壳体1
左侧的左行走结构,设置在所述底盘壳体1右侧的右行走结构。所述底盘壳体1为矩形盒体,上方设置有大开口,以方便安装各类零件。所述电机2与所述电机减速器21的数量均为两个,所述电机减速器21输入端与所述电机2输出轴相连。所述左行走结构与所述右行走结构对称相同,一个行走结构对应一个电机2,以此获得更充足的动力及更好的转弯性能。
34.如图3~4所示,所述左行走结构与所述右行走结构均包括履带7,用于带动所述履带7行走的主动轮组3,固定在所述底盘壳体1一侧的轮组安装板8,以及设置在所述轮组安装板8上的用于支撑消防机器人整体重量的若干负重轮组4、用于托起所述履带7的若干拖带轮组5和用于履带7导向的导向轮组6。
35.由于火灾现场环境复杂,所述负重轮组4需要承担起整个机器人的重量,承受消防机器人行进时所受到的大部分冲击力,因此所述负重轮组4更容易损坏。当负重轮组4损坏时,为了不耽误抢险救灾,就需要对负重轮组4快速更换。因此本发明采取将负重轮组4、拖带轮组5和导向轮组6安装到轮组安装板8的方式,达到在紧急情况下快速整体更换负重轮组4的目的,以快速恢复消防机器人的行动,而更换下来的负重轮组4可以在后方进行维修。
36.如图5~7所示,所述主动轮组3包括叉型支架33、主动轴、主动链轮31、被动链轮331、带动驱动轮332、从动轴336和链条32。所述叉型支架33包括叉柄和匚字型固定架,所述叉柄上设置有轴孔,所述叉柄通过与所述轴孔共轴的主动轮轴承34可转动的设置在所述底盘壳体1的一侧。所述匚字型固定架固定在所述叉柄底端,所述叉柄顶端可转动的固定在下述第一负重轮组4的第一减震机构42顶端,以此与第一负重轮组4形成联动。
37.具体来说,当所述主动轮组3越过障碍时,所述带动驱动轮332会向上抬起,即所述叉型支架33向上转动,所述叉柄的顶端挤压下述第一负重轮组4的第一减震机构42,经过此第一减震机构42的缓冲进而将压力传输至下述第一负重轮组4的第一负重轮44,此第一负重轮44紧压所述履带7,增加所述履带7的抓地能力,以此更轻松的越过障碍。而不是像传统消防机器人底盘那样,越过障碍时,负重轮容易悬空,导致被较高的障碍物卡住。
38.所述主动轴的一端与所述电机减速器21的输出端相连,另一端穿过所述主动轮轴承34并伸出所述轴孔,当所述叉型支架33通过所述主动轮轴承34转动时不会与所述主动轴联动,所述主动链轮31固定在所述主动轴上。所述被动链轮331与带动驱动轮332均固定在所述从动轴336上,所述从动轴336可转动的固定在所述匚字型固定架上。所述主动链轮31通过所述链条32与所述被动链轮331连接。所述电机2启动,通过所述电机减速器21和所述主动轴的传动,带动所述主动链轮31运转,主动链轮31通过链条32带动所述被动链轮331转动,进而带动所述带动驱动轮322转动,所述带动驱动轮332驱动所述履带7行走。
39.进一步,为了方便更换履带7,所述匚字型固定架的两侧分别设置有履带松紧调节结构,所述从动轴336通过所述履带松紧调节结构可转动的固定在所述匚字型固定架上。
40.所述履带松紧调节结构包括松紧调节固定块333、调节螺杆334、调节螺栓335、从动轴固定板337和设置在所述匚字型固定架上的腰型孔338。所述松紧调节固定块333上设置有螺孔,所述松紧调节固定块333固定在所述匚字型固定架的一侧。所述调节螺杆334的一端旋入所述螺孔,另一端与所述从动轴固定板337的一侧固定。所述调节螺栓335的数量为两个,且内螺纹相反,所述调节螺栓335套接在所述调节螺杆334上,这两个调节螺栓335将所述松紧调节固定块333夹在中间。所述腰型孔338的宽度大于所述从动轴336的直径,所述从动轴336的两端分别从所述匚字型固定架两侧的腰型孔338中伸出,并可转动的固定在
所述从动轴固定板337上。
41.通过转动两个调节螺栓335,调整从动轴336与主动链轮31之间的距离,即调整所述链条32及履带7的松紧。当需要安装链条32或履带7时,需要缩小间距;而当安装完成后,增加间距,便可张紧所述链条32或履带7。
42.所述负重轮组4用来支撑消防机器人,所述负重轮组4间隔相同的设置在所述轮组安装板8上。本发明以三个负重轮组4为例,这三个负重轮组4均匀的设置在所述主动轮组3及导向轮组6之间。并依据距离主动轮组3的远近,将这三个负重轮组4依次命名为第一负重轮组4、第二负重轮组4和第三负重轮组4。其中,所述第一负重轮组4与所述主动轮组3距离最近。
43.如图8~9所示,所述负重轮组4包括镰刀型支架41、第一减震机构42、第二减震机构43、第一负重轮44、第一转动杆45和第一固定杆46。所述镰刀型支架41包括相互垂直的短杆和长杆,安装时长杆在下短杆在上。所述镰刀型支架41通过第一转动杆45可转动的设置在所述轮组安装板8上,所述第一转动杆45的一端固定在所述短杆与长杆的交接处。所述第一减震机构42的一端可转动的固定在所述长杆上,另一端通过所述第一固定杆46固定在所述轮组安装板8上。所述长杆的底端可转动的固定有第一负重轮44。所述第二减震机构43的一端可转动的固定在所述短杆的顶端,另一端通过所述第一固定杆46固定在所述轮组安装板8上。当所述第一负重轮44被向上抬起时,所述镰刀型支架41转动,所述第一减震机构42与第二减震机构43均受力压缩,一方面缓冲冲击力,另一方面将履带7紧紧的压在障碍物上,增加抓地能力,以越过障碍,防止被障碍物卡住。
44.其中,所述第一负重轮组4与所述第二和第三负重轮组4是不同的,所述第一负重轮组4的第一减震机构42顶端并不是固定在轮组安装板8上,而是与所述叉柄的顶端可转动连接,以实现主动轮组3与第一负重轮组4的联动。
45.所述拖带轮组5设置在所述负重轮组4的上方,所述拖带轮组5用来托起所述履带7,增加履带7的紧绷度,防止履带7过松塌下来。
46.如图10~11所示,所述拖带轮组5包括l型支架51和拖带轮52。所述l型支架51固定在所述轮组安装板8上,所述拖带轮52可转动的设置在所述l型支架51的另一端,所述拖带轮52顶起所述履带7。
47.所述导向轮组6设置在所述消防机器人的末端,所述导向轮组6用于所述履带7的导向。
48.如图12~13所示,所述导向轮组6包括t型支架61、导向轮62、第二负重轮63、第二转动杆64、第二固定杆65和第三减震机构66。所述t型支架61包括弧形支杆和中心杆,安装时,所述弧形支杆在下,所述中心杆朝上。所述弧形支杆位于上方的那端通过第二转动杆64可转动的固定在所述轮组安装板8上,所述弧形支杆位于下方的那端与第二负重轮63连接,所述导向轮62设置在所述中心杆的顶端。所述第三减震机构66的数量为两个,所述第三减震机构66的一端均可转动的固定在所述中心杆上,另一端均通过所述第二固定杆65固定在所述轮组安装板8上。
49.当所述第二负重轮63被向上抬起时,所述t型支架61转动,所述第三减震机构66均受力压缩。所述第三减震机对所述t型支架61施加反作用力,通过第二负重轮63将履带7紧紧的压在障碍物上,增加抓地能力,以越过障碍,防止被障碍物卡住。同时,所述导向轮62向
上运动使履带7始终被撑紧,进一步提供履带7的抓地能力。
50.其中,所述第一减震机构42、第二减震机构43和第三减震机构66结构相同,均包括压缩弹簧和缓冲气缸。
51.以上所述的本发明实施方式,并不构成对本发明保护范围的限定。任何在本发明的精神和原则之内所作的修改、等同替换和改进等,均应包含在本发明的权利要求保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。