1.本发明涉及无人艇的数据监测技术领域,具体涉及一种用于无人艇的智能监测与预警系统与方法。
背景技术:
2.无人艇作为一种新型的自主航行工具是一个软硬件相结合、功能强大的复杂系统,具有高速度、高机动性、智能化以及低成本等特性。usv(unmanned surface vehicle,简称usv)能够在安全区域下操纵突破人的生理极限,在恶劣环境下完成海洋勘探,环境调查,海洋监测,安防巡逻等各种复杂任务。
3.无人艇监测系统作为usv中的关键一环,无人艇的姿态、升沉、舵角、启动风速、位置信息、转速、振动等运动状态参数直接影响着无人艇的航行安全,由于无人艇上无人员监测仪表并作出相应操作,容易导致无人艇在进入错误航行状态时处于危险处境,如:倾覆、失去动力等。因此需要一套远程监测装置帮助岸基人员有效监测无人艇运行状态,并对其进行调整。
4.大型船舶的数据测量与采集设备大都结构复杂、造价昂贵,且存在体积质量大、维修困难、不便于装卸等问题,并不适用于小型无人艇;而多数集成传感系统其传感器是由多个厂家所生产和部署,这些传感器的数据格式、数据传输标准、接口都不一样,造成了传感器及采集数据的多源化异构化,因此需要设计一种远程无人艇运行状态监测系统,该系统需具备“数据分布式获取,集中式传输,集中式处理,消除数据孤岛”的功能,既能实时监测无人艇运动状态参数,同时也可以根据监测数据进行无人艇运状态和故障判断。
技术实现要素:
5.为了在实现无人艇航行过程中无人艇状态数据采集的同时,减小监测设备的整体体积,减少后期维护的麻烦,本发明提出了一种用于无人艇的智能监测与预警系统,包括:
6.若干外挂传感器,用于以低频的速率获取外界以及无人艇自身相应的低频状态数据信号,并通过485通讯总线整合至主控芯片;
7.若干板载传感器,用于以高频的速率获取无人艇自身相应的高频状态数据信号,并分别通过cpci总线传输至主控芯片;
8.岸基基站,用于接收状态数据信号,并根据状态数据信号反馈相应的控制信号至无人艇;
9.主控芯片,用于通过信号收发器反馈状态数据信号至岸基基站,并根据控制信号控制无人艇进行相应的状态调整;
10.信号收发器,通过cpci总线连接于主控芯片,用于以高频的速率发送状态数据信号至岸基基站,并接收岸基基站的控制信号。
11.进一步地,所述外挂传感器含有风速传感器、风向传感器和角度传感器,其中,
12.风速传感器,用于获取无人艇当前航迹点的风速;
13.风向传感器,用于获取无人艇当前航迹点的风向;
14.角度传感器,用于获取无人艇当前的转舵角度。
15.进一步地,所述外挂传感器还含有振动传感器和转速传感器,其中,
16.振动传感器,用于获取无人艇发动机的振动信号;
17.转速传感器,用于获取无人艇发动机的转速信号。
18.进一步地,还包括模拟量转换器,用于将振动信号和转速信号转换为模拟信号。
19.进一步地,所述板载传感器包括六轴姿态传感器和gps传感器,其中,
20.六轴姿态传感器,用于获取无人艇航行中实时的无人艇姿态信息;
21.gps传感器,用于获取无人艇航行中实时的定位信息。
22.进一步地,所述岸基基站包括,
23.数据处理模块,用于根据状态数据信号生成相应的控制信号,并根据静态阈值识别异常状态数据;
24.显示模块,用于显示无人艇当前的状态数据;
25.预警模块,用于根据异常状态数据生成预警信号。
26.进一步地,还包括按键模块,用于输入静态阈值以及状态数据信号对应的控制信号。
27.本发明还提出了一种用于无人艇的智能监测与预警方法,包括步骤:
28.s1:判断传感器的数据传输速率是否大于预设阈值,若是,设置传感器通过cpci总线进行高频状态数据信号的传输,若否,设置传感器通过485通讯总线进行低频状态数据信号的整合和传输;
29.s2:接收状态数据信号,并通过信号收发器反馈至岸基基站;
30.s3:接收岸基基站根据状态数据信号发送的控制信号,并根据控制信号控制无人艇进行相应的状态调整;
31.所述信号收发器,通过cpci总线连接于主控芯片,用于以高频的速率发送状态数据信号至岸基基站,并接收岸基基站的控制信号。
32.进一步地,当岸基基站接收到状态数据信号后,具体包括步骤:
33.判断状态数据信号是否超出静态阈值,若是,发出预警信号;
34.根据状态数据信号生成相应的控制信号,并根据状态数据信号显示无人艇当前的状态数据。
35.进一步地,所述状态数据信号通过stm32单片机进行接收,所述stm32单片机的芯片型号为stm32f103zet6。
36.与现有技术相比,本发明至少含有以下有益效果:
37.(1)本发明所述的一种用于无人艇的智能监测与预警系统与方法,其基于不同传感器不同的数据采集频率,将高频传感器通过cpci总线建议与主控芯片之间的数据传输,从而保证了高关键度数据的实时传输性;
38.(2)通过485通讯总线进行低频传感器的数据采集,从而在确保了低关键度数据的采集的统一性,确保了数据传输的同步性,减少了主控芯片对于不同传输标准数据的处理步骤;
39.(3)通过对不同无人艇状态数据的采集和反馈,保证了无人艇在无人航行状态下
的航行安全,及时对异常状态进行相应处理。
附图说明
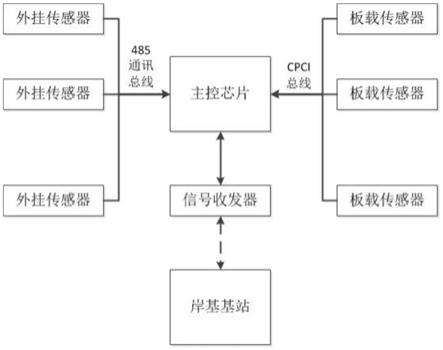
40.图1为一种用于无人艇的智能监测与预警系统的系统结构图;
41.图2为一种用于无人艇的智能监测与预警方法的方法步骤图。
具体实施方式
42.以下是本发明的具体实施例并结合附图,对本发明的技术方案作进一步的描述,但本发明并不限于这些实施例。
43.实施例一
44.为了解决部分无人艇体积小、结构紧凑而导致检测设备不便安装,以及大型监测设备后期维护困难,维护成本高的问题,如图1所示,本发明提出了一种用于无人艇的智能监测与预警系统,包括:
45.若干外挂传感器,用于以低频的速率获取外界以及无人艇自身相应的低频状态数据信号,并通过485通讯总线整合至主控芯片;
46.若干板载传感器,用于以高频的速率获取无人艇自身相应的高频状态数据信号,并分别通过cpci总线传输至主控芯片;
47.岸基基站,用于接收状态数据信号,并根据状态数据信号反馈相应的控制信号至无人艇;
48.主控芯片,用于通过信号收发器反馈状态数据信号至岸基基站,并根据控制信号控制无人艇进行相应的状态调整;
49.信号收发器,通过cpci总线连接于主控芯片,用于以高频的速率发送状态数据信号至岸基基站,并接收岸基基站的控制信号。
50.本发明考虑到不同无人艇状态数据的不同关键程度,如无人艇姿态、无人艇定位等无人艇数据,因其每一时刻的状态都关乎到无人艇自身的航行安全,因此其需要高频率的对这类数据进行采集。因此,为了满足这类数据的高频采集要求,本发明通过cpci总线将这类传感器直接连接在主控芯片上,从而实现无人艇航行过程中对于这类数据的高频采集要求。
51.而对于其它的一些航行数据,如风速、风向、主机温度、主机转速、主机振动参数等并非需要时刻关注的数据,本发明不再通过cpci总线对该类数据进行高频采集。同时,又考虑到不同传感器之间可能存在不同的传输标准,同时接口方式也可能存在不同,而单一的stm32单片机可能无法高效率的对不同传输标准的数据进行转换,而转换后可能也会存在数据接收时差,导致数据无法统一进行反馈,大大增加了信号收发器的使用时长,增加了功耗也提高的信号收发器的故障可能性。因此,为了使得不同标准的数据的能够得到统一,使得主控芯片能够及时统一的对数据信号进行传输和反馈,本发明对于该类低频数据采用485通讯总线的方式进行数据传输,将不同标准的数据信号统一转换为485通讯标准再传输至主控芯片,从而保证的数据处理的统一和高效。
52.进一步地,在本发明中,外挂传感器含有风速传感器、风向传感器和角度传感器,以保证无人艇航行过程中,能够及时对风况做出反馈,同时根据定位信息和目标地点进行
航向调整,其中,
53.风速传感器,用于获取无人艇当前航迹点的风速;
54.风向传感器,用于获取无人艇当前航迹点的风向;
55.角度传感器,用于获取无人艇当前的转舵角度。
56.而为了保证无人艇发动机的状态稳定,外挂传感器中还包括振动传感器和转速传感器,其中,
57.振动传感器,用于获取无人艇发动机的振动信号;
58.转速传感器,用于获取无人艇发动机的转速信号。
59.因为状态正常的情况下,发动机不同转速的振幅和振频一般都是稳定在一定范围内的,而一旦出现异常状态,其振幅和振频都会发生突变,且这种突变一般都是持续性的。因此,仅需相隔一端时间对该异常状态进行采集即可满足对该类状况的监测要求。
60.需要注意的是,由于采集到的振幅和振频信号一般为数字信号,不能被主控芯片直接识别,因此,此处还需加设一个模拟量转换器,用于将振幅信号、振频信号和转速信号转换为模拟信号再输入主控芯片。
61.而在本实施例中,板载传感器包括六轴姿态传感器和gps传感器,其中,
62.六轴姿态传感器,用于获取无人艇航行中实时的无人艇姿态信息;
63.gps传感器,用于获取无人艇航行中实时的定位信息。
64.对于采集到的无人艇状态数据,除了主控芯片根据内部预先设置的控制机制进行的相应无人艇操控外,还会根据岸基基站的反馈对无人艇进行相应操控,具体的,岸基基站包括:
65.数据处理模块,用于根据状态数据信号生成相应的控制信号,并根据静态阈值识别异常状态数据;
66.显示模块,用于显示无人艇当前的状态数据;
67.预警模块,用于根据异常状态数据生成预警信号;
68.按键模块,用于输入静态阈值以及状态数据信号对应的控制信号。
69.通过岸基基站的设置,方便了用户及时对无人艇航行状态的可视化数据获取,同时,对于无人艇的异常状态提供及时的反馈与处理。
70.综上所述,本发明所述的一种用于无人艇的智能监测与预警系统与方法,其基于不同传感器不同的数据采集频率,将高频传感器通过cpci总线建议与主控芯片之间的数据传输,从而保证了高关键度数据的实时传输性。
71.通过485通讯总线进行低频传感器的数据采集,从而在确保了低关键度数据的采集的统一性,确保了数据传输的同步性,减少了主控芯片对于不同传输标准数据的处理步骤。通过对不同无人艇状态数据的采集和反馈,保证了无人艇在无人航行状态下的航行安全,及时对异常状态进行相应处理。
72.实施例二
73.为了更好的对本发明的思路进行理解,本实施例通过方法步骤的形式来对本技术方案进行阐述,如图2所示,一种用于无人艇的智能监测与预警方法,包括步骤:
74.s1:判断传感器的数据传输速率是否大于预设阈值,若是,设置传感器通过cpci总线进行高频状态数据信号的传输,若否,设置传感器通过485通讯总线进行低频状态数据信
号的整合和传输;(例如无人艇姿态的倾斜,会导致无人艇的倾翻,因此需要时刻注意无人艇的姿态调整,避免倾翻的发生,而要做到这一点,就需对无人艇的姿态进行实时的高频采集)
75.s2:接收状态数据信号,并通过信号收发器反馈至岸基基站;
76.s3:接收岸基基站根据状态数据信号发送的控制信号,并根据控制信号控制无人艇进行相应的状态调整;
77.所述信号收发器,通过cpci总线连接于主控芯片,用于以高频的速率发送状态数据信号至岸基基站,并接收岸基基站的控制信号。
78.进一步地,当岸基基站接收到状态数据信号后,具体包括步骤:
79.判断状态数据信号是否超出静态阈值,若是,发出预警信号;
80.根据状态数据信号生成相应的控制信号,并根据状态数据信号显示无人艇当前的状态数据。
81.其中,状态数据信号通过stm32单片机进行接收,所述stm32单片机的芯片型号为stm32f103zet6。
82.需要说明,本发明实施例中所有方向性指示(诸如上、下、左、右、前、后
……
)仅用于解释在某一特定姿态(如附图所示)下各部件之间的相对位置关系、运动情况等,如果该特定姿态发生改变时,则该方向性指示也相应地随之改变。
83.另外,在本发明中如涉及“第一”、“第二”、“一”等的描述仅用于描述目的,而不能理解为指示或暗示其相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括至少一个该特征。在本发明的描述中,“多个”的含义是至少两个,例如两个,三个等,除非另有明确具体的限定。
84.在本发明中,除非另有明确的规定和限定,术语“连接”、“固定”等应做广义理解,例如,“固定”可以是固定连接,也可以是可拆卸连接,或成一体;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系,除非另有明确的限定。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本发明中的具体含义。
85.另外,本发明各个实施例之间的技术方案可以相互结合,但是必须是以本领域普通技术人员能够实现为基础,当技术方案的结合出现相互矛盾或无法实现时应当认为这种技术方案的结合不存在,也不在本发明要求的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。