1.本发明涉及图像处理技术领域,具体是基于双模块的足迹信息提取方法。
背景技术:
2.现如今,随着科技的飞速发展,人的身份识别技术也不断出现新的方法;足迹压力信息作为人类重要的生物特征之一正在被进一步发展和研究,但是现阶段的足迹特征往往是借鉴专业人士的经验来进行分析,这种传统分析方式非常依赖专家的经验,并且在分析的过程中难免会加入自己的主观思想,影响分析的准确性,造成了在刑侦过程中进行足迹信息分析的巨大困难;
3.通常在刑侦过程中,对于现场留下的足迹信息线索,公安刑侦人员只能通过有经验的专家来进行人工分析,这种分析方式有很多弊端:首先,培养一个合格的足迹专家需要很长时间,投入的人力,物力很多;其次,无论多么专业的足迹专家也会混入自己的主观决断,有的时候可能无法给出绝对正确的结论;最后,现场的脚印形式多种多样,在不借助外力仅仅依靠专家的识别的情况下可能会遗漏很多重要信息,并且在识别过程中往往需要很久的时间,效率低下。
技术实现要素:
4.本发明旨在至少解决现有技术中存在的技术问题之一。为此,本发明提出基于双模块的足迹信息提取方法,解决了人力分析足迹特征所带来的不稳定性的问题;本发明设计了一种提取足迹轮廓信息和重压信息的算法,操作者只需要简单几步就可以获取足迹图像的轮廓信息和重压的信息,大大提高在刑侦现场进行足迹压力信息分析的速度和准确性,也为之后的足迹信息比对工作提供了方便。
5.为实现上述目的,根据本发明的第一方面的实施例提出基于双模块的足迹信息提取方法包括如下步骤:
6.步骤一:拍摄现场足迹图像,获取图像i1;
7.步骤二:通过预处理模块对拍摄的现场足迹图像i1进行预处理,得到图像i2;所述预处理表示为:利用基于中值滤波的改进的canny算法既去除椒盐噪声,同时又保留足迹图像的轮廓信息;然后通过提高亮度使足迹轮廓更加清晰,将图像处理成二值化图像;
8.步骤三:通过足迹轮廓信息提取模块从图像i2中提取足迹的外轮廓信息,并将这个轮廓作为一种足迹信息提供给操作者做足迹的比对;具体为:
9.使用轮廓提取算法提取足迹外轮廓的一系列特征点,通过与原始图像进行比较,使用贝塞尔曲线算法对获得的轮廓进行修正、补合,再使用轮廓提取算法提对轮廓进行进一步优化;
10.步骤四:通过重压信息提取模块提取足迹的重压信息,并将这个重压信息作为一种足迹信息提供给操作者做足迹的比对,具体为:
11.根据原始足迹图像的信息,通过人工干预的方法确定重压区域的大致位置,通过
调整重压提取算法的各项参数提取重压区域的特征点;根据特征点和重压点与投影点之间的对应关系确定重压区域,将足迹的重压信息以椭圆区域以及色彩分布呈现。
12.进一步地,使用轮廓提取算法提取足迹外轮廓的一系列特征点,特征点需要满足如下公式:
[0013][0014]
其中:i2表示预处理后的足迹图像,i2(x,y)表示获取的像素点,gray(i2(x,y))表示当前像素点的灰度值;当函数f1(x,y)输出的值为1,则表示该像素点为所需的特征点。
[0015]
进一步地,对提取的特征点做进一步筛选,其表达式如下:
[0016][0017][0018]
其中:l1表示步骤s1中获得的特征点,(x
t-1
,y
t-1
)为t-1时刻筛选的特征点的坐标,(x
t
,y
t
)为当前t时刻判断的特征点的坐标;当这两个公式同时输出1时,表示当前t时刻筛选的特征点为(x
t
,y
t
)。
[0019]
进一步地,还包括:对筛选后的特征点进行整合连接,得到足迹的大致轮廓;利用贝塞尔曲线对得到的轮廓进一步优化,表达式为:
[0020]
其中pi为插入的控制点,t∈[0,1],n表示贝塞尔曲线的阶数,i为控制点数;
[0021]
利用基于中值滤波的改进的canny算法提取优化后的轮廓;如果得到的轮廓信息不完整,将当前图像返回步骤三,重新提取足迹外轮廓的一系列特征点进行处理。
[0022]
进一步地,重压信息提取模块的具体工作步骤如下:
[0023]
s41:根据原始足迹图像的信息,通过人工干预的方法选取疑似重压点(x0,y0)作为重压区域的重压点;
[0024]
s42:提取的重压区域由压力的特征点决定,通过调节卷积核和阈值的大小找到设定方向下的特征点;
[0025]
s43:重压区域呈现出椭圆形状,椭圆的长轴和旋转角度是由特征点与重压点的距离决定;
[0026]
s44:根据长轴的特征点与重压点产生的角度来决定重压区域的旋转角度,其表达式如下:其中:(x0,y0)为重压点的横纵坐标,(xi,yi)为长轴点坐标;
[0027]
s45:重压区域的短轴特征点由长轴特征点与旋转角度决定,通过确定的重压区域的旋转角度来求得各个特征点在短轴方向上的投影点;
[0028]
s46:通过投影点求出与重压点的距离来确定重压区域的短轴特征点,此时的短轴
特征点即为对应的投影点,特征点需要满足下列公式:
[0029]
si=||k
i-z0||2[0030]
b=max{s1,s2,
…
sn}
[0031]
其中:ki表示投影点横纵坐标拼成的二维向量,b为重压区域的短轴;
[0032]
s47:根据计算的长短轴a、b以及旋转角度θ确定足迹的重压区域;
[0033]
s48:重压区域的压力信息由其区域内的像素决定,重压区域内每个像素点的像素值由权重决定,表达式为:其中(xi,yi)表示重压区域内的像素点,(x
t
,y
t
)表示与像素点(xi,yi)同方向下的重压区域的边界点;
[0034]
s49:根据像素点的权重给重压区域添加压力信息。
[0035]
进一步地,步骤s42中特征点需要满足下列公式:
[0036][0037][0038][0039]
其中:n为卷积核的大小,di为这个卷积核中每个像素点的值,d为输入的平均像素值,y为设定的可变阈值;当c的输出值为1,则表示已找到该方向下的特征点。
[0040]
进一步地,步骤s43中重压区域的长轴根据下列公式计算:
[0041]
li=||z
i-z0||2[0042]
a=max{l1,l2,
…
ln}
[0043]
其中zi是由一个特征点的横纵坐标拼成的二维向量,z0是由疑似重压点的横纵坐标拼成的二维向量;a为重压区域的长轴,li对应的特征点记为长轴点。
[0044]
进一步地,步骤s45中投影点根据下列公式计算:m=pu
t
u;
[0045]
其中u为长轴特征点与重压点方向下的单位向量,t为转置,p为特征点坐标,m为对应特征点的投影坐标。
[0046]
与现有技术相比,本发明的有益效果是:
[0047]
本发明中轮廓信息提取模块利用轮廓信息提取算法提取轮廓信息保证了客观性,在进行轮廓补全的步骤时人工补全保证了主观性,这样大大提高了提取的轮廓的准确性;重压信息提取模块通过人工干预的方法确定重压区域的大致位置,极大地接受了人工干预的主观性,再根据特征点和重压点与投影点之间的对应关系确定重压区域,将足迹的重压信息以椭圆区域以及色彩分布呈现,有效保留了原始图像的重压信息;解决了人力分析足迹特征所带来的不稳定性的问题,大大提高在刑侦现场进行足迹压力信息分析的速度和准确性,也为之后的足迹信息比对工作提供了方便。
附图说明
[0048]
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
[0049]
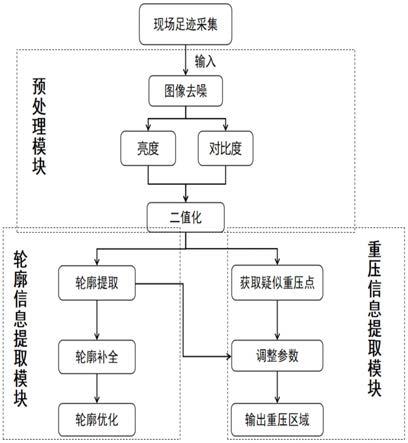
图1为本发明基于双模块的足迹信息提取方法的原理框图。
具体实施方式
[0050]
下面将结合实施例对本发明的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其它实施例,都属于本发明保护的范围。
[0051]
如图1所示,基于双模块的足迹信息提取方法,包括预处理模块、轮廓信息提取模块和重压信息提取模块,具体过程如下:
[0052]
步骤一:拍摄现场足迹图像,获取图像i1;
[0053]
步骤二:通过预处理模块对拍摄的现场足迹图像i1进行预处理,得到图像i2;由于拍摄的现场足迹图像内充斥着各种噪声,首先预处理模块利用基于中值滤波的改进的canny算法既去除椒盐噪声,同时又保留足迹图像的轮廓信息;然后通过提高亮度使足迹轮廓比较清晰,将图像处理成二值化图像,得到图像i2;
[0054]
步骤三:通过足迹轮廓信息提取模块从图像i2中提取足迹的外轮廓信息,并将这个轮廓作为一种足迹信息提供给操作者做足迹的比对;具体为:
[0055]
使用轮廓提取算法提取足迹外轮廓的一系列特征点,然而轮廓提取算法提取的特征点中也可能存在着噪声点,因而得到的轮廓并不完整;
[0056]
通过与原始图像进行比较,使用贝塞尔曲线算法对获得的轮廓进行修正、补合;再使用轮廓提取算法提对轮廓进行进一步优化;
[0057]
其中足迹轮廓信息提取模块的具体工作步骤如下:
[0058]
s31:使用轮廓提取算法提取足迹外轮廓的一系列特征点,特征点需要满足如下公式:
[0059][0060]
其中:i2表示预处理后的足迹图像,i2(x,y)表示获取的像素点,gray(i2(x,y))表示当前像素点的灰度值;当函数f1(x,y)输出的值为1,则表示该像素点为所需的特征点;
[0061]
s32:图像i2中存在的些许噪声点会影响轮廓信息,为了减少噪声点对轮廓信息的影响对步骤s1获得的特征点做进一步筛选,其表达式如下:
[0062]
[0063][0064]
其中:l1表示步骤s1中获得的特征点,(x
t-1
,y
t-1
)为t-1时刻筛选的特征点的坐标,(x
t
,y
t
)为当前t时刻判断的特征点的坐标;当这两个公式同时输出1时表示当前t时刻筛选的特征点为(x
t
,y
t
);
[0065]
s33:对步骤s32提取的特征点进行整合连接,得到足迹的大致轮廓;
[0066]
s34:利用贝塞尔曲线对步骤s33得到的轮廓进一步优化,表达式如下所示:
[0067][0068]
其中:pi为插入的控制点,t∈[0,1],n表示贝塞尔曲线的阶数,i为控制点数;
[0069]
s35:利用基于中值滤波的改进的canny算法提取优化后的轮廓,用中值滤波代替高斯滤波的改进算法具有较高的信噪比,有效地克服了传统canny算法中高斯滤波会产生丢失一些缓变边缘的情况,能够得到更好的边缘检测效果;如果得到的轮廓信息不完整,将当前图像返回步骤s31继续处理;
[0070]
步骤四:通过重压信息提取模块提取足迹的重压信息,并将这个重压信息作为一种足迹信息提供给操作者做足迹的比对,具体为:
[0071]
根据原始足迹图像的信息,通过人工干预的方法确定重压区域的大致位置,通过调整重压提取算法的各项参数提取重压区域的特征点;根据特征点和重压点与投影点之间的对应关系确定重压区域,将足迹的重压信息以椭圆区域以及色彩分布呈现;
[0072]
其中重压信息提取模块的具体工作步骤如下:
[0073]
s41:根据原始足迹图像的信息,通过人工干预的方法选取疑似重压点(x0,y0)作为重压区域的重压点;
[0074]
s42:提取的重压区域由压力的特征点决定,通过调节卷积核和阈值的大小找到设定方向下的特征点,特征点需要满足下列公式:
[0075][0076][0077][0078]
其中:n为卷积核的大小,di为这个卷积核中每个像素点的值,d为输入的平均像素值,y为设定的可变阈值;当c的输出值为1,则表示已找到该方向下的特征点;
[0079]
s43:重压区域呈现出椭圆形状,椭圆的长轴和旋转角度是由特征点与重压点的距
离决定,根据公式计算重压区域的长轴:
[0080]
li=||z
i-z0||2[0081]
a=max{l1,l2,
…
ln}
[0082]
其中:zi是由一个特征点的横纵坐标拼成的二维向量,z0是由疑似重压点的横纵坐标拼成的二维向量;a为重压区域的长轴,li对应的特征点记为长轴点;
[0083]
s44:重压区域的旋转角度由长轴的特征点决定,根据长轴的特征点与重压点产生的角度来决定重压区域的旋转角度,其表达式如下:
[0084][0085]
其中:(x0,y0)为重压点的横纵坐标,(xi,yi)为长轴点坐标;
[0086]
s45:重压区域的短轴特征点由长轴特征点与旋转角度决定,通过确定的重压区域的旋转角度来求得各个特征点在短轴方向上的投影点,投影点根据下列公式计算:
[0087]
m=pu
tu[0088]
其中:u为长轴特征点与重压点方向下的单位向量,t为转置,p为特征点坐标,m为对应特征点的投影坐标;
[0089]
s46:通过投影点求出与重压点的距离来确定重压区域的短轴特征点,此时的短轴特征点即为对应的投影点,特征点需要满足下列公式:
[0090]
si=||k
i-z0||2[0091]
b=max{s1,s2,
…
sn}
[0092]
其中:ki表示投影点横纵坐标拼成的二维向量,b为重压区域的短轴;
[0093]
s47:根据计算的长短轴a、b以及旋转角度θ确定足迹的重压区域;
[0094]
s48:重压区域的压力信息由其区域内的像素决定,重压区域内每个像素点的像素值由权重决定,其表达式如下:
[0095][0096]
其中:(xi,yi)表示重压区域内的像素点,(x
t
,y
t
)表示与像素点(xi,yi)同方向下的重压区域的边界点;像素点的权重越大,表示该像素点的压力越浅;
[0097]
s49:根据像素点的权重给重压区域添加压力信息。
[0098]
上述公式均是去除量纲取其数值计算,公式是由采集大量数据进行软件模拟得到最接近真实情况的一个公式,公式中的预设参数和预设阈值由本领域的技术人员根据实际情况设定或者大量数据模拟获得。
[0099]
本发明的工作原理:
[0100]
基于双模块的足迹信息提取方法,在工作时,首先预处理模块对拍摄的现场足迹图像i1进行预处理,利用基于中值滤波的改进的canny算法既去除椒盐噪声,同时又保留足迹图像的轮廓信息;然后通过提高亮度使足迹轮廓比较清晰,将图像处理成二值化图像,得到图像i2;通过足迹轮廓信息提取模块从图像i2中提取足迹的外轮廓信息,使用轮廓提取算法提取足迹外轮廓的一系列特征点,同时为了减少噪声影响对提取的特征点做进一步筛选,将筛选后的特征点进行整合连接,得到足迹的大致轮廓,通过与原始图像进行比较,使
用贝塞尔曲线算法对获得的轮廓进行修正、补合;再使用轮廓提取算法提对轮廓进行进一步优化,综合了系统的客观性和人工干预的主观性,大大提高了提取的轮廓的准确性;
[0101]
然后通过重压信息提取模块提取足迹的重压信息,根据原始足迹图像的信息,通过人工干预的方法确定重压区域的大致位置,通过调整重压提取算法的各项参数提取重压区域的特征点;根据特征点和重压点与投影点之间的对应关系确定重压区域,将足迹的重压信息以椭圆区域以及色彩分布呈现,有效保留了原始图像的重压信息,极大地接受了人工干预的主观性,为分析现场足迹信息提供了方便。
[0102]
在本说明书的描述中,参考术语“一个实施例”、“示例”、“具体示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本发明的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不一定指的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任何的一个或多个实施例或示例中以合适的方式结合。
[0103]
以上公开的本发明优选实施例只是用于帮助阐述本发明。优选实施例并没有详尽叙述所有的细节,也不限制该发明仅为的具体实施方式。显然,根据本说明书的内容,可作很多的修改和变化。本说明书选取并具体描述这些实施例,是为了更好地解释本发明的原理和实际应用,从而使所属技术领域技术人员能很好地理解和利用本发明。本发明仅受权利要求书及其全部范围和等效物的限制。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
