1.本发明涉及电缆技术领域,尤其涉及一种工业机器人用电缆的生产工艺。
背景技术:
2.随着科技的发展,劳动强度大的工作越来越广泛地采用工业机器人,使得工业机器人用电缆的需求量不断提升,但同时也对工业机器人用电缆性能提出了更高的要求。
3.现有的工业机器人用电缆在使用时,容易受到静电干扰,使用效果不好,并且工业机器人用电缆在生产时,需要设置多个绕包机对控制单元本体进行绕包作业,生产成本高。
技术实现要素:
4.本发明的目的是为了解决现有技术中存在的缺点,而提出的一种工业机器人用电缆的生产工艺。
5.为达到上述目的,本发明采用了下列技术方案:
6.一种工业机器人用电缆的生产工艺,包括电缆本体,所述电缆本体的内层包括两组控制单元本体和四组动力单元本体,其特征在于,该电缆的控制单元本体的生产工艺包括以下步骤:
7.步骤一、将通过挤塑机处理后形成控制单元绝缘层的控制单元导体穿过绕包机;
8.步骤二、控制单元导体通过各个卷绕筒绕设上对应的绕包层。
9.作为本发明的进一步技术方案,所述步骤二中,电机带动第一传动杆转动,从而带动第三传动杆转动,致使各个卷绕筒转动,进行绕包工作。
10.作为本发明的进一步技术方案,所述步骤二中,拉动移动板,即可带动滑块一起移动,从而调整移动板在滑槽上的位置。
11.作为本发明的进一步技术方案,所述步骤二中,将卷绕有绕包线圈的线圈筒放到转动板,线圈筒在绕包线圈的牵引下,带动转动板一起转动,配合卷绕筒工作。
12.作为本发明的进一步技术方案,所述步骤二中,当转动板上的线圈筒将要用完时,将移动板向外侧拉出,更换对应的线圈筒,继续进行绕包工作。
13.作为本发明的进一步技术方案,每组所述控制单元本体均包括两个控制单元导体,每个控制单元导体的外部均包覆有控制单元绝缘层,两个控制单元绝缘层的外部设置有同一个控制单元绕包屏蔽层,控制单元绕包屏蔽层的外部设置有控制单元编织屏蔽层。
14.本发明的有益效果:
15.1、通过设置的铝塑复合带,使该电缆在使用时,可以防止静电干扰和电磁感应。
16.2、通过设置的第一传动杆、第二传动杆和各个卷绕筒的配合,使电机的驱动轴在转动时,带动第一传动杆转动,通过第一传动杆与第二传动杆的配合,带动多个卷绕筒转动,使卷绕筒可以对控制单元本体进行绕包处理,将对应的绕包线圈绕设在控制单元本体的外侧壁上,并且通过设置的移动板、转动板和滑槽的配合,当绕包材料的线圈筒快用完时,操作人员只需向外侧拉动移动板,然后更换新的线圈筒即可,不需要停机作业,提高绕
包工作的效率。
附图说明
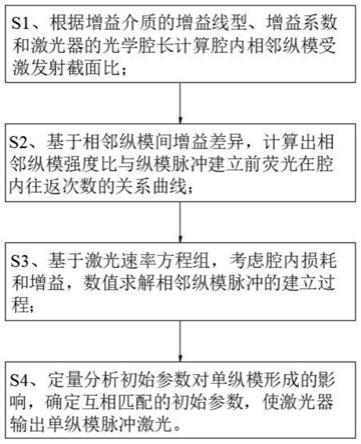
17.图1为本发明的工作流程图;
18.图2为本发明的结构示意图;
19.图3为本发明中第一连接架与绕包机的连接示意图;
20.图4为本发明中第一蜗杆套与第一蜗轮套的连接示意图;
21.图5为本发明中固定架与移动板的连接示意图。
22.图中:1、电缆本体;2、控制单元本体;3、动力单元本体;4、控制单元导体;5、控制单元绝缘层;6、控制单元绕包屏蔽层;7、控制单元编织屏蔽层;8、控制单元填充层;9、动力单元导体;10、动力单元绝缘层;11、第一包带层;12、总编织屏蔽层;13、第二包带层;14、护套层;15、总填充层;16、绕包机;17、第一连接架;18、第一传动杆;19、第一蜗杆套;20、第二连接架;21、第二传动杆;22、第一蜗轮套;23、第二蜗杆套;24、第三传动杆;25、第二蜗轮套;26、卷绕筒;27、固定架;28、滑槽;29、移动板;30、定位柱;31、转动板。
具体实施方式
23.为更进一步阐述本发明为实现预定发明目的所采取的技术手段及功效,以下结合附图及较佳实施例,对依据本发明的具体实施方式、结构、特征及其功效,详细说明如后。
24.参照图1-图5,一种工业机器人用电缆的生产工艺,包括电缆本体1,电缆本体1的内层包括两组控制单元本体2和四组动力单元本体3,两组控制单元本体2与四组动力单元本体3的外部设置有同一个第一包带层11,第一包带层11的外部设置有总编织屏蔽层12,总编织屏蔽层12的外部设置有第二包带层13,第二包带层13的外部包覆有护套层14,第一包带层11与控制单元本体2之间设置有总填充层15;
25.该电缆的控制单元本体2的生产工艺包括以下步骤:
26.步骤一、将通过挤塑机处理后形成控制单元绝缘层5的控制单元导体4穿过绕包机16;
27.步骤二、控制单元导体4通过各个卷绕筒26绕设上对应的绕包层。
28.参照图2,每组控制单元本体2均包括两个控制单元导体4,每个控制单元导体4的外部均包覆有控制单元绝缘层5,两个控制单元绝缘层5的外部设置有同一个控制单元绕包屏蔽层6,控制单元绕包屏蔽层6的外部设置有控制单元编织屏蔽层7,控制单元绝缘层5与控制单元绕包屏蔽层6之间设置有控制单元填充层8,每组动力单元本体3均包括动力单元导体9,每组动力单元导体9的外部均包覆有动力单元绝缘层10,动力单元绝缘层10采用了氧指数大于40%的低烟无卤阻燃热塑性弹性体材料,可保证电缆具有使用温度范围广、阻燃、耐高低温和耐曲挠性能。
29.参照图2,控制单元导体4与动力单元导体9均为镀锡铜导体,具体为第六类结构的多股镀锡软铜丝束绞,使该电缆的使用温度范围在-70℃到125℃之间,使用温度范围广,控制单元绝缘层5为低烟无卤阻燃热塑性弹性体材料,该材料具有适中的软硬度,控制单元绕包屏蔽层6为铝塑复合带,用于防止静电干扰和电磁感应,均匀电场,控制单元编织屏蔽层7为镀锡铜丝,用于防止外界信号干扰,总填充层15采用无碱玻纤充填绳材料,护套层14为低
烟无卤阻燃聚烯烃护套。
30.参照图3和图4,步骤二中,电机带动第一传动杆18转动,从而带动各个第一蜗杆套19转动,转动的各个第一蜗杆套19带动对应的各个第一蜗轮套22转动,从而带动各个第二传动杆21和各个第二蜗杆套23转动,转动的各个第二蜗杆套23带动各个第二蜗轮套25和各个第三传动杆24转动,从而带动各个卷绕筒26转动,进行绕包工作。
31.参照图3和图4,步骤二中,拉动移动板29,即可带动滑块一起移动,从而调整移动板29在滑槽28上的位置,将卷绕有绕包线圈的线圈筒放到转动板31,线圈筒在绕包线圈的牵引下,带动转动板31一起转动,配合卷绕筒26工作。
32.参照图3和图4,绕包机16的一侧端面固定有第一连接架17,第一连接架17内开设有第一空腔,第一空腔内转动设置有第一传动杆18,第一传动杆18上固定套设有四个第一蜗杆套19,第一连接架17的底部固定有四个第二连接架20,每个第二连接架20内均开设有第二空腔,第二空腔贯穿第一空腔,第二空腔内转动设置有第二传动杆21,每个第二传动杆21靠近第一传动杆18的一端均固定套设有第一蜗轮套22,第一蜗轮套22与第一蜗杆套19啮合连接,绕包机16内固定有驱动第一传动杆18转动的电机,当电机的驱动轴转动时,带动第一传动杆18转动,由于第一蜗杆套19与第一蜗轮套22是啮合连接的,所以当第一传动杆18转动时,会带动第二传动杆21转动。
33.参照图3和图4,每个第二传动杆21远离第一传动杆18的一端均固定套设有第二蜗杆套23,第二连接架20靠下部位置转动设置有第三传动杆24,第三传动杆24贯穿第二连接架20,位于第二空腔内的第三传动杆24外侧壁上固定套设有第二蜗轮套25,第二蜗轮套25与第二蜗杆套23啮合连接,每个第三传动杆24远离绕包机16的一端均固定有卷绕筒26,由于第二蜗杆套23是与第二蜗轮套25啮合连接的,所以当第二传动杆21转动时,会带动第三传动杆24和卷绕筒26转动,使卷绕筒26可以对控制单元本体2进行绕包处理,将对应的绕包线圈绕设在控制单元本体2的外侧壁上。
34.参照图3和图5,绕包机16靠近第一连接架17的一侧固定有固定架27,固定架27上开设有四组滑槽28,每个滑槽28内均滑动连接有滑块,滑块的上端面固定有移动板29,移动板29的上端面开设有转动槽,转动槽的底部固定有定位柱30,转动槽内转动连接有转动板31,转动板31的底部转动设置有多个滚珠,转动板31可以在移动板29上转动,将绕包材料的线圈筒放置在转动板31上,为卷绕筒26的绕包作业提供绕包线圈,并且当线圈筒快用完时,操作人员只需向外侧拉动移动板29,然后更换新的线圈筒即可,不需要停机作业,提高绕包工作的效率。
35.本发明在使用时,将通过挤塑机处理后形成控制单元绝缘层5的控制单元导体4穿过绕包机16,然后电机转动,通过第一传动杆18与第二传动杆21的配合,带动多个卷绕筒26转动,使卷绕筒26可以对控制单元本体2进行绕包处理,将对应的绕包线圈绕设在控制单元本体2的外侧壁上,当绕包材料的线圈筒快用完时,操作人员只需向外侧拉动移动板29,然后更换新的线圈筒即可,不需要停机作业,提高绕包工作的效率。
36.以上所述,仅是本发明的较佳实施例而已,并非对本发明作任何形式上的限制,虽然本发明已以较佳实施例揭示如上,然而并非用以限定本发明,任何本领域技术人员,在不脱离本发明技术方案范围内,当可利用上述揭示的技术内容做出些许更动或修饰为等同变化的等效实施例,但凡是未脱离本发明技术方案内容,依据本发明的技术实质对以上实施
例所作的任何简介修改、等同变化与修饰,均仍属于本发明技术方案的范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。