1.本发明涉及汽车制动的技术领域,尤其涉及一种电动汽车的制动控制方法及系统。
背景技术:
2.目前市场上新能源汽车在制动系统常采用电动助力系统,其制动控制存在以下缺点:1、获得驾驶员制动意图的方式较为单一,只能通过制动踏板开关信号,或者制动主缸压力。制动踏板开关信号只有踩下和未踩下两种状态,不能表征驾驶员踩的具体行程/位置。用制动主缸压力信号也存在无法确定对车/驾驶员真实驾驶意图的识别,特别是新能源汽车上,如果采用了制动能量回收,踩制动踏板初段是无主缸压力的。但车是有减速度的。由于无法准确的或者驾驶员意图,所以在实际使用的过程中,无法准确的施加压力,造成制动舒适性较差。2、在出现真空助力完全失效(真空泵损坏,真空助力器失效,真空管泄漏等)问题时,由于没有相应的真空度值,驾驶员需要用很大的力去踩踏板,无法帮助驾驶员达到预期的减速度。因此,如何很好地提高失效工况下的制动减速度,以保证行驶安全,具有重要的意义。
技术实现要素:
3.本发明提供一种电动汽车的制动控制方法及系统,解决现有电动汽车制动系统无法准确根据驾驶员意图控制制动减速的问题,能提高电动汽车的使用安全性,增加汽车制动的舒适性。
4.为实现以上目的,本发明提供以下技术方案:
5.一种电动汽车的制动控制方法,包括:
6.实时检测制动踏板行程并判断制动踏板是否被踩下,如果是,则发送制动踏板开关信号并获取制动真空度;
7.电动助力总成根据所述制动踏板开关信号和所述制动真空度产生制动压力,并在所述制动真空度小于设定阈值时控制液压辅助总成启动,以补偿所述制动真空度不足;
8.车身稳定控制系统根据所述制动压力对主缸产生目标主缸压力,并按所述目标主缸压力控制整车减速,以使所述目标主缸压力与踏板行程保持一致。
9.优选的,还包括:
10.判断所述电动助力总成是否处于降级模式,如果是,则通过can总线向所述车身稳定控制系统发送液压助力请求和所述制动压力;
11.所述车身稳定控制系统根据所述液压助力请求对轮缸主动增压,使实际轮缸压力达到所述目标轮缸压力。
12.优选的,还包括:
13.如果所述电动助力总成处于故障模式且制动踏板被踩下,则所述车身稳定控制系统根据标定的踏板行程与压力曲线对轮缸进行主动增压,使实际主缸压力达到所述目标主
缸压力。
14.优选的,还包括:
15.所述车身稳定控制系统还根据制动灯开关信号判断是否制动踏板被踩下,如果制动灯开关处于导通状态,则根据踏板推杆通过机械备份方式推动主缸活塞建压的主缸压力数值,按预设标定的曲线产生轮缸压力,以进行整车减速。
16.优选的,还包括:
17.如果所述电动助力总成与所述车身稳定系统之间的总线通讯中断或存在液压助力应答信号故障,则液压辅助总成进入液压助力递减控制,以逐步减小车速。
18.本发明还提供一种电动汽车的制动控制系统,包括:踏板行程传感器,整车控制器、电动助力总成、车身稳定控制系统和驱动电机控制总成;
19.所述整车控制器通过can总线与所述车身稳定控制系统、所述电动助力总成和所述驱动电机控制总成总线连接,所述整车控制器与所述踏板行程传感器信号连接;
20.所述踏板行程传感器用于实时检测制动踏板行程;
21.所述整车控制器根据所述制动踏板行程判断制动踏板是否被踩下,如果是,则通过can总线发送制动踏板开关信号;
22.所述电动助力总成根据所述制动踏板开关信号和制动真空度产生制动压力,并在所述制动真空度小于设定阈值时控制液压辅助总成启动,以补偿所述制动真空度不足;
23.所述车身稳定控制系统根据所述制动压力对轮缸产生目标主缸压力,并按所述目标主缸压力控制整车减速,以使所述目标主缸压力与踏板行程保持一致。
24.优选的,所述电动助力总成处于降级模式时通过can总线向所述车身稳定控制系统发送液压助力请求和所述制动压力;
25.所述车身稳定控制系统根据所述液压助力请求对轮缸主动增压,使实际轮缸压力达到所述目标轮缸压力。
26.优选的,所述车身稳定控制系统在所述电动助力总成处于故障模式且制动踏板被踩下时,根据标定的踏板行程与压力曲线对轮缸进行主动增压,使实际主缸压力达到所述目标主缸压力。
27.优选的,所述车身稳定控制系统还根据制动灯开关信号判断是否制动踏板被踩下,如果制动灯开关处于导通状态,则根据踏板推杆通过机械备份方式推动主缸活塞建压的主缸压力数值,按预设标定的曲线产生轮缸压力,以进行整车减速。
28.优选的,所述电动助力总成中的电动助力器采用解耦方式构建所述制动压力与所述制动踏板行程之间的关系。
29.本发明提供一种电动汽车的制动控制方法及系统,由电动助力总成根据制动踏板行程产生制动压力,车身稳定控制系统根据所述制动压力对主缸产生目标主缸压力,并按所述目标主缸压力控制整车减速,解决现有电动汽车制动系统无法准确根据驾驶员意图控制制动减速的问题,能提高电动汽车的使用安全性,增加汽车制动的舒适性。
附图说明
30.为了更清楚地说明本发明的具体实施例,下面将对实施例中所需要使用的附图作简单地介绍。
31.图1是本发明提供的一种电动汽车的制动控制方法示意图。
32.图2是本发明提供的一种液压助力控制的流程图。
具体实施方式
33.为了使本技术领域的人员更好地理解本发明实施例的方案,下面结合附图和实施方式对本发明实施例作进一步的详细说明。
34.针对当前现有电动汽车制动系统无法准确根据驾驶员意图控制制动减速的问题,本发明提供一种电动汽车的制动控制方法及系统,解决现有电动汽车制动系统无法准确根据驾驶员意图控制制动减速的问题,能提高电动汽车的使用安全性,增加汽车制动的舒适性。
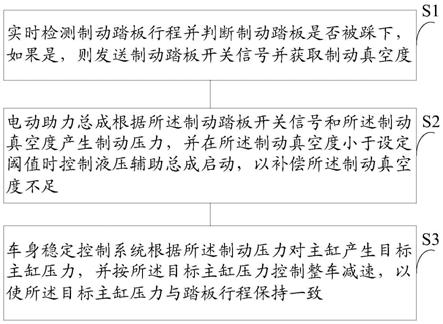
35.如图1所示,一种电动汽车的制动控制方法,包括:
36.s1:实时检测制动踏板行程并判断制动踏板是否被踩下,如果是,则发送制动踏板开关信号并获取制动真空度。
37.s2:电动助力总成根据所述制动踏板开关信号和所述制动真空度产生制动压力,并在所述制动真空度小于设定阈值时控制液压辅助总成启动,以补偿所述制动真空度不足。
38.s3:车身稳定控制系统根据所述制动压力对主缸产生目标主缸压力,并按所述目标主缸压力控制整车减速,以使所述目标主缸压力与踏板行程保持一致。
39.在实际应用中,整车正常的制动过程中,驾驶员踩下制动踏板,ebs依据其内置的踏板行程传感器获取驾驶员的完整的驾驶意图,并控制其内部助力机构(如电机),推动主缸产生制动压力,其制动压力通过esc分配到轮缸上,使整车产生减速度。液压辅助总成hbc是在使用真空助力系统中,由车辆的车身稳定控制系统esc搭配传统的真空助力器和制动主缸组成,当驾驶员踩下制动踏板时,如果真空助力器真空度不足(高纬度或发动机高怠速等情况)、达到极限或者制动力衰退,甚至真空助力完全失效(发动机憋熄火,真空泵损坏,真空助力器失效,真空管泄漏等)时,hbb功能启动并通过esc系统主动增加制动压力,帮助驾驶员达到预期的减速度。本方法通过esc的hbc功能,来使得制动压力和踏板行程保持更好的一致性,提升制动舒适性。
40.该方法还包括:
41.s4:判断所述电动助力总成是否处于降级模式,如果是,则通过can总线向所述车身稳定控制系统发送液压助力请求和所述制动压力。
42.s5:所述车身稳定控制系统根据所述液压助力请求对轮缸主动增压,使实际轮缸压力达到所述目标轮缸压力。
43.该方法还包括:
44.s6:如果所述电动助力总成处于故障模式且制动踏板被踩下,则所述车身稳定控制系统根据标定的踏板行程与压力曲线对轮缸进行主动增压,使实际主缸压力达到所述目标主缸压力。
45.在实际应用中,电动助力总成ebs由于内部原因(如电机过热),致使其处于降级模式,不能按照整车正常情况下原先标定的工况,产生足够的主缸压力。那么在此种故障下,若驾驶员踩下制动踏板,由于空行程存在,踏板推杆无法立刻触及主缸活塞建压。当ebs检
测到自身无法提供足够助力时,将通过总线信号向esc发送hbc请求,同时并相关的压力值(压力值依据ebs依据标定工况减去其自身能达到的)给esc。esc接受到相关信号后,主动增压到其目标值。确保制动压力和踏板行程能够保持更好的一致性。驾驶员在整车上没有感觉到减速度的变化。
46.该方法还包括:
47.s7:所述车身稳定控制系统还根据制动灯开关信号判断是否制动踏板被踩下,如果制动灯开关处于导通状态,则根据踏板推杆通过机械备份方式推动主缸活塞建压的主缸压力数值,按预设标定的曲线产生轮缸压力,以进行整车减速。
48.在实际应用中,ebs由于出现故障(如电机损坏等)而无法提供助力时,ebs将通过总线信号发送hbc请求。若驾驶员继续踩下踏板,踏板推杆将克服空行程并通过机械备份方式推动主缸活塞建压。另一方面,esc收到ebs发送的hbc请求,将根据踏板行程传感器的数值,获取驾驶员的驾驶意图,并依据原先车辆正常情况下所标定的踏板行程-压力曲线,对轮缸进行主动增压,轮缸压力最终等于驾驶员总制动需求。同样确保制动压力与踏板行程的一致性。
49.在ebs出现故障(如踏板行程传感器),ebs本身是无法提供助力时,且在此工况下,踏板行程传感器表征的驾驶员意图的信号不可用时,esc将通过总线信号接受到ebs无法助力的故障标志位,同时依据制动灯开关信号来确认踏板行程传感器是否可用,当不可用时。esc会依据制动灯开关信号作为其输入条件。此时,若驾驶员继续踩下踏板,踏板推杆将克服空行程并通过机械备份方式推动主缸活塞建压。esc依据此时主缸压力数值,按照原先标定的曲线产生轮缸压力。同时,由于此时踏板要踩到一定的深度,才能推动主缸活塞建压,为了快速的实现整车减速,在此工况下,整车控制器vcu会依据ebs状态,在其失效下通过能量回收产生相应的减速度。能量回收产生的减速度加上esc产生的减速度,可以保证整车当出现此种失效时,可以较快实现减速,保证安全。
50.总而言之,当ebs出现故障而无法提供足够助力时,若驾驶员踩下制动踏板,由于空行程存在,踏板推杆无法立刻触及主缸活塞建压。当ebs检测到自身无法助力时,将通过总线信号发送hbc请求。若驾驶员继续踩下踏板,踏板推杆将克服空行程并通过机械备份方式推动主缸活塞建压。另一方面,esc收到ebs发送的hbc请求,将根据当前主缸压力对轮缸进行主动增压,轮缸压力最终等于驾驶员总制动需求。
51.该方法还包括:
52.s8:如果所述电动助力总成与所述车身稳定系统之间的总线通讯中断或存在液压助力应答信号故障,则液压辅助总成进入液压助力递减控制,以逐步减小车速。
53.在实际应用中,如图2所示,当ebs与esc之间总线通讯中断或esc诊断液压助力应答信号(hbcrequest信号)故障时,esc功能应进入液压助力递减控制状态。在reduced状态下,应当认为仅仅是ebs与esc之间的通信产生故障而ebs依然具有助力功能。因此,为了防止助力过大,esc所提供的hbc功能应进入液压助力递减控制状态,在此状态下,esc功能的助力比应适当减小,以避免过大的制动力。其进入的条件主要,主缸压力在最大门限值以内,且大于最小门限值,车速大于门限值,通讯丢失或信号节点异常,驾驶员踩下制动踏板,主缸压力传感器正常。
54.本方法可以在电动助力器出现助力不足(助力电机过热、电子助力器处于降级模
式等)、助力完全失效(助力电机损坏、供电故障等)或者通讯丢失时,hbc通过esc模块主动加压提高轮缸制动压力。在hbc(非降级)情况下,目标轮缸液压力值通过踏板行程传感器获得,当主缸实际压力小于目标压力时对应功能激活。在hbc(降级)情况下,目标轮缸液压力通过当前实际的主缸液压力获得,并通过限制最大值保证在常规路面车辆不会失稳。这一功能可以在正常工作条件下,使得制动压力和踏板行程保持更好的一致性。
55.可见,本发明提供一种电动汽车的制动控制方法,由电动助力总成根据制动踏板行程产生制动压力,车身稳定控制系统根据所述制动压力对主缸产生目标主缸压力,并按所述目标主缸压力控制整车减速,解决现有电动汽车制动系统无法准确根据驾驶员意图控制制动减速的问题,能提高电动汽车的使用安全性,增加汽车制动的舒适性。
56.相应地,本发明还提供一种电动汽车的制动控制系统,包括:踏板行程传感器,整车控制器、电动助力总成和车身稳定控制系统。所述整车控制器通过can总线与所述车身稳定控制系统和所述电动助力总成总线连接,所述整车控制器与所述踏板行程传感器信号连接。所述踏板行程传感器用于实时检测制动踏板行程。所述整车控制器根据所述制动踏板行程判断制动踏板是否被踩下,如果是,则通过can总线发送制动踏板开关信号。所述电动助力总成根据所述制动踏板开关信号和制动真空度产生制动压力,并在所述制动真空度小于设定阈值时控制液压辅助总成启动,以补偿所述制动真空度不足。所述车身稳定控制系统根据所述制动压力对轮缸产生目标主缸压力,并按所述目标主缸压力控制整车减速,以使所述目标主缸压力与踏板行程保持一致。
57.进一步,所述电动助力总成处于降级模式时通过can总线向所述车身稳定控制系统发送液压助力请求和所述制动压力。
58.所述车身稳定控制系统根据所述液压助力请求对轮缸主动增压,使实际轮缸压力达到所述目标轮缸压力。
59.进一步,所述车身稳定控制系统在所述电动助力总成处于故障模式且制动踏板被踩下时,根据标定的踏板行程与压力曲线对轮缸进行主动增压,使实际主缸压力达到所述目标主缸压力。
60.进一步,所述车身稳定控制系统还根据制动灯开关信号判断是否制动踏板被踩下,如果制动灯开关处于导通状态,则根据踏板推杆通过机械备份方式推动主缸活塞建压的主缸压力数值,按预设标定的曲线产生轮缸压力,以进行整车减速。
61.进一步,所述电动助力总成中的电动助力器采用解耦方式构建所述制动压力与所述制动踏板行程之间的关系。其中,电动助力器是采用解耦方式,即踩制动踏板和产生制动压力不是必然的直接联系,是解耦的。他们之间的关系是电动助力器通过获取相应的踏板行程,基于整车标定相应压力,获取相应的减速度。
62.可见,本发明提供一种电动汽车的制动控制系统,由电动助力总成根据制动踏板行程产生制动压力,车身稳定控制系统根据所述制动压力对主缸产生目标主缸压力,并按所述目标主缸压力控制整车减速,解决现有电动汽车制动系统无法准确根据驾驶员意图控制制动减速的问题,能提高电动汽车的使用安全性,增加汽车制动的舒适性。
63.以上依据图示所示的实施例详细说明了本发明的构造、特征及作用效果,以上所述仅为本发明的较佳实施例,但本发明不以图面所示限定实施范围,凡是依照本发明的构想所作的改变,或修改为等同变化的等效实施例,仍未超出说明书与图示所涵盖的精神时,
均应在本发明的保护范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。