技术特征:
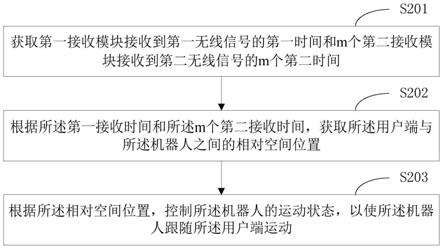
1.一种机器人控制方法,其特征在于,包括:获取第一接收模块接收到第一无线信号的第一时间和m个第二接收模块接收到第二无线信号的m个第二时间,所述第一无线信号和所述第二无线信号由用户端同步发射,所述第一无线信号的传输速度大于所述第二无线信号的传输速度,m为大于或等于2的整数;根据所述第一接收时间和所述m个第二接收时间,获取所述用户端与所述机器人之间的相对空间位置;根据所述相对空间位置,控制所述机器人的运动状态,以使所述机器人跟随所述用户端运动。2.如权利要求1所述的机器人控制方法,其特征在于,所述根据所述第一接收时间和所述m个第二接收时间,获取所述用户端与所述机器人之间的相对空间位置,包括:根据所述第一时间和所述m个第二接收时间,获取所述用户端与所述m个第二接收模块之间的m个距离;根据所述m个距离中的两个最小距离,获取所述用户端与所述机器人之间的相对空间位置;或者,根据所述m个距离中的n个距离,通过n点定位法获取所述用户端与所述机器人之间的相对空间位置,m和n均为大于或等于3的整数。3.如权利要求2所述的机器人控制方法,其特征在于,所述根据所述m个距离中的两个最小距离,获取所述用户端与所述机器人之间的相对空间位置,包括:根据所述m个距离中的两个最小距离,获取所述用户端与预设连线之间的垂直距离以及垂足与所述预设连线的第一端点之间的直线距离,所述机器人的前进方向由所述预设连线的第二端点指向第一端点,所述预设连线为所述两个最小距离对应的两个第二接收模块之间的连线;所述根据所述m个距离中的n个距离,通过n点定位法获取所述用户端与所述机器人之间的相对空间位置,包括:根据所述m个距离中的n个距离,通过n点定位法获取所述用户端的位置信息;根据所述用户端的位置信息和所述m个距离中的两个最小距离对应的两个第二接收模块的位置信息,获取所述用户端与预设连线之间的垂直距离以及垂足与所述预设连线的第一端点之间的直线距离,所述机器人的前进方向由所述预设连线的第二端点指向第一端点,所述预设连线为所述两个最小距离对应的两个第二接收模块之间的连线。4.如权利要求3所述的机器人控制方法,其特征在于,所述根据所述相对空间位置,控制所述机器人的运动状态,包括:若所述机器人处于停止状态、预设直线距离与所述直线距离之间的差值大于或等于第一阈值,控制所述机器人进入前进状态,并返回获取第一接收模块接收到第一无线信号的第一时间和m个第二接收模块接收到第二无线信号的m个第二时间;若所述机器人处于停止状态、预设直线距离与所述直线距离之间的差值小于或等于负的第一阈值,控制所述机器人进入后退状态,并返回获取第一接收模块接收到第一无线信号的第一时间和m个第二接收模块接收到第二无线信号的m个第二时间;若所述机器人处于停止状态、预设直线距离与所述直线距离之间的差值大于负的第一阈值且小于第一阈值,返回获取第一接收模块接收到第一无线信号的第一时间和m个第二
接收模块接收到第二无线信号的m个第二时间;若所述机器人处于前进状态、预设直线距离与所述直线距离之间的差值小于或等于第二阈值,控制所述机器人进入停止状态,并返回获取第一接收模块接收到第一无线信号的第一时间和m个第二接收模块接收到第二无线信号的m个第二时间;若所述机器人处于前进状态、预设直线距离与所述直线距离之间的差值大于第二阈值,返回获取第一接收模块接收到第一无线信号的第一时间和m个第二接收模块接收到第二无线信号的m个第二时间;若所述机器人处于后退状态、预设直线距离与所述直线距离之间的差值大于或等于负的第二阈值,控制所述机器人进入停止状态,并返回获取第一接收模块接收到第一无线信号的第一时间和m个第二接收模块接收到第二无线信号的m个第二时间;若所述机器人处于后退状态、预设直线距离与所述直线距离之间的差值小于负的第二阈值,返回获取第一接收模块接收到第一无线信号的第一时间和m个第二接收模块接收到第二无线信号的m个第二时间。5.如权利要求3所述的机器人控制方法,其特征在于,所述根据所述相对空间位置,控制所述机器人的运动状态,包括:若所述垂直距离大于预设垂直距离,控制所述机器人进入第一转向状态,并返回获取第一接收模块接收到第一无线信号的第一时间和m个第二接收模块接收到第二无线信号的m个第二时间,直到所述垂直距离等于预设垂直距离时为止,所述机器人在所述第一转向状态下朝向所述用户终端运动;若所述垂直距离小于预设垂直距离,控制所述机器人进入第二转向状态,并返回获取第一接收模块接收到第一无线信号的第一时间和m个第二接收模块接收到第二无线信号的m个第二时间,直到所述垂直距离等于预设垂直距离时为止,所述机器人在所述第二转向状态下背离所述用户终端运动。6.如权利要求3至5任一项所述的机器人控制方法,其特征在于,所述根据所述第一接收时间和所述m个第二接收时间,获取所述用户端与所述机器人之间的相对空间位置之后,包括:通过卡尔曼滤波方法对所述直线距离进行平滑滤波处理。7.如权利要求1至5任一项所述的机器人控制方法,其特征在于,所述根据所述相对空间位置,控制所述机器人的运动状态,包括:获取所述机器人的运动状态;若所述机器人不处于停止状态、前进状态或后退状态,发出报警信号。8.一种机器人控制装置,其特征在于,包括:时间获取单元,用于获取第一接收模块接收到第一无线信号的第一时间和m个第二接收模块接收到第二无线信号的m个第二时间,所述第一无线信号和所述第二无线信号由用户端同步发射,所述第一无线信号的传输速度大于所述第二无线信号的传输速度,m为大于或等于2的整数;位置获取单元,用于根据所述第一接收时间和所述m个第二接收时间,获取所述用户端与所述机器人之间的相对空间位置;运动控制单元,用于根据所述相对空间位置,控制所述机器人的运动状态,以使所述机
器人跟随所述用户端运动。9.一种终端设备,其特征在于,包括处理器、存储器以及存储在所述存储器中并可在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现权利要求1至7任一项所述机器人控制方法的步骤;所述终端设备为机器人控制设备时,还包括用于与所述机器人无线通信的无线通信模块;所述终端设备为机器人时,还包括所述第一接收模块和所述m个第二接收模块。10.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质存储有计算机程序,所述计算机程序被处理器执行时实现权利要求1至7任一项所述机器人控制方法的步骤。
技术总结
本申请适用于机器人技术领域,提供一种机器人控制方法、装置、终端设备及存储介质,通过获取第一接收模块接收到第一无线信号的第一时间和多个第二接收模块接收到第二无线信号的多个第二时间,第一无线信号和第二无线信号由用户端同步发射,并且第一无线信号的传输速度大于第二无线信号的传输速度;根据第一接收时间和多个第二接收时间,获取用户端与机器人之间的相对空间位置;根据相对空间位置,控制机器人的运动状态,以使机器人跟随用户端运动,利用多个在发射时间上同步的无线信号的飞行时间,获得用户端与机器人之间的相对空间位置,从而使得机器人可以根据相对空间位置实现对用户端的可靠跟随。对用户端的可靠跟随。对用户端的可靠跟随。
技术研发人员:范文华 周博 周海浪
受保护的技术使用者:深圳市优必选科技股份有限公司
技术研发日:2021.11.30
技术公布日:2022/3/8
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。