一种基于gps信号的无人机机群密钥提取与安全认证方法
技术领域
1.本发明属于数据信息处理技术领域,涉及一种基于gps信号的无人机机群密钥提取与安全认证方法。
背景技术:
2.无人机因为其低成本、高机动性、易携带、部署快速、使用方便、时效性强等诸多优点,在军事、民用领域得到了广泛应用。由于无人机通信网络的自组织特点,它极易受到干扰和黑客攻击,威胁无人机通信的安全性。
3.当前常见的针对无人机机群的通信安全常采用加密通信过程,为了保证通信安全,需要无人机提前持有相同密钥,即需要提前将加密密钥分发。目前已提出的方案有:对称密钥分发、公钥加密、基于口令的认证密钥交换方案等。
4.目前的相关技术大多都存在着明显的局限性:(1)对称密钥分发:需要安全信道进行密钥传输,以确保预置密钥不会在分发过程中泄露。实际场景中,由于用户安全意识不高,预置密钥往往会被多次使用或缺乏足够的随机性。此外还缺乏密钥更新,一旦密钥泄露,则整个飞行过程中的机群信息都将泄露。(2)公钥加密:不要求安全信道,但计算和存储开销大,效率较低。(3)基于口令的认证密钥交换方案:解决预置密钥随机性不足的问题,但是该方案依旧需要提前将口令放入各无人机内,且由于其运行过程中需要多轮交互,导致通信开销极高。
技术实现要素:
5.有鉴于此,本发明的目的在于提供一种基于gps信号的无人机机群密钥提取与安全认证方法,该方法只需要通过公开信道就可以实现机群内所有无人机上初始密钥的生成,且提取出的密钥具备足够的信息熵,能够解决密钥随机性不足的问题。
6.为达到上述目的,本发明提供如下技术方案:
7.一种基于gps信号的无人机机群密钥提取与安全认证方法,该方法主要分为信息提取阶段和设备认证阶段,包括1)在初始化时,机群系统中各节点根据自身采集到的gps信号,利用人工智能技术生成相似序列信息;2)通过模糊提取器(fuzzy extractor)生成统一信息;3)最后,根据统一信息产生会话密钥;机群间通过会话密钥加密交互信息,以确保通信安全,且飞行过程中,机群每隔一段时间重新根据gps信号提取密钥,实现密钥更新。
8.进一步,该方法具体包括以下步骤:s1、特征提取:通过gps数据接收处理和人工智能算法,机群接收gps信号数据获取得到具有相似性的序列,并提取其中具有相似性的数据特征作为认证特征;s2、模糊提取:采用模糊提取器进一步对步骤s1中得到的特征数据进行处理,以使机群内所有的无人机得到完全相同的信息;s3、设备认证:机群间通过会话密钥加密交互信息,以确保通信安全,且飞行过程中,机群每隔一段时间重新根据gps信号提取密钥,实现密钥更新。
9.进一步,在步骤s1中,具体包括以下步骤:
10.s11、gps信号接收与解析:使用无人机天线与无人机上的gps接收器,将接收到的gps报文传回无人机中的控制器进行处理,无人机内部处理器将gps信号的报文进行解析;gps信号报文遵从nmea协议,报文中包含当前坐标,时间戳,卫星本身信息,通过无人机处理器解析出时间戳、卫星prn编号与该卫星的载噪比信号,存储到内部存储设备中;
11.s12、gps数据处理:根据无人机群之间间隔的距离,在同一段时间内,不同无人机获取得到的同一个gps信号变化情况进行相似性的分析对比,并通过统计方法将直接接收到的一段时间内各个卫星的信号强度数据进行数据归一化,形成统一的数据序列;
12.s13、数据特征提取:根据多个无人机之间获取得到的对比数据,利用机器学习算法,对数据进行特征提取,获取得到在一定范围内数据的相似性特征,在距离相近时,多个设备之间收集到的数据的波动变化呈现相似性特征;在特征提取结束后,使用新的接收数据经过数据处理获取得到数据序列,根据其相似性特征进行验证。
13.进一步,在步骤s2中,所述模糊提取器用于从带有噪音的随机源中提取均匀分布且可精确再生的随机比特的密码学工具,其包含两个算法:
14.a、gen(w)
→
(p,r):生成算法gen输入字符串w(噪音随机源的一次采样),输出一个字符串r和一个公开的辅助串p;
15.b、rep(w',p)
→
r':再生算法输入w'(噪音随机源的另一次采样)和公开辅助串p,输出一个字符串r';
16.模糊提取器要求在输入字符串w与再生算法输入w
‘
距离够近时,再生算法再生的字符串r'与生成的字符r完全相同。
17.进一步,所述公开辅助串p由中心机产生,并广播给周围的无人机,周围无人机通过自身gps信号提取特征产生输入字符串w’,结合辅助串p,执行模糊提取得到字符串r。
18.进一步,在步骤s3中,具体包括:
19.a、初始化阶段:在无人机起飞前,此时机群内所有无人机处于中心机一定范围内,所有无人机执行信息提取算法即通过gps信号解析、特征提取与模糊提取,得到初始信息r0(即字符串r),所有无人机将r0作为初始密钥k0;
20.c、飞行阶段:飞行过程中,机群以一定的时间间隔执行信息提取算法,并产生新的通信密钥:假设t时刻时,无人机提取出的信息为rt,则t 1时刻,机群使用的通信密钥为:kt 1=kt
⊕
rt=r0
⊕
r1
⊕…⊕
rt,
⊕
代表异或操作;
21.c、离群返航:假设飞行过程中,一无人机于n时刻离开机群执行任务,则返航时重新获取通信密钥的流程如下:返航时,离群机持有离群时通信密钥kn,离群机首先通过身份认证方案发送kn到中心机,中心机收到kn,并确认后,返回n时刻到t-1时刻的信息rn,(t-1)=rn 1
⊕
rn 2
⊕
...
⊕
rt-1到离群机,离群机接收到rn,(t-1)后,根据gps信号,计算得到rt,最后根据kn
⊕
rn,(t-1)
⊕
rt得到当前机群内通信密钥kt。
22.本发明的有益效果在于:
23.由于机群内无人机在生成密钥时只需本身采集的gps信号与来自中心机的公共信息,因此本方案避免了初始化时的密钥分发问题,只需要通过公开信道就可以实现机群内所有无人机上初始密钥的生成。另一方面,模糊提取器的特性,以及gps信号的随机性也保证了提取出的密钥具备足够的信息熵,解决密钥随机性不足的问题。此外,由于自组网在车联网、物联网等场景下的普遍性,因此本方案中的基于gps信号的认证机制不仅能够应用于
无人机的机群中,也能够应用于其它无人设备自组网场景下,具有良好的扩展性与商业价值。
24.本发明的其他优点、目标和特征在某种程度上将在随后的说明书中进行阐述,并且在某种程度上,基于对下文的考察研究对本领域技术人员而言将是显而易见的,或者可以从本发明的实践中得到教导。本发明的目标和其他优点可以通过下面的说明书来实现和获得。
附图说明
25.为了使本发明的目的、技术方案和优点更加清楚,下面将结合附图对本发明作优选的详细描述,其中:
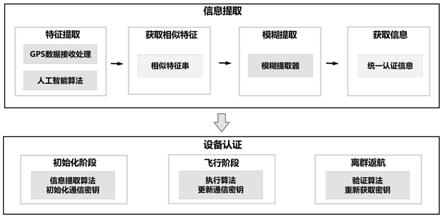
26.图1为本发明的流程图示意图;
27.图2为实施例中测量2米时卫星信号的相似性结果;
28.图3为实施例中测量70米时卫星信号的相似性结果。
具体实施方式
29.下面结合附图对本发明技术方案进行详细说明。
30.图1为本发明的流程图示意图,本发明提出了一种基于gps信号的无人机机群认证通信机制。在初始化时,系统中各节点根据自身采集到的gps信号,利用人工智能技术生成相似序列信息。之后通过模糊提取器(fuzzy extractor)生成统一信息。最后,根据统一信息产生会话密钥。机群间通过会话密钥加密交互信息,以确保通信安全。飞行过程中,机群每隔一段时间重新根据gps信号提取密钥,实现密钥更新。
31.如图所示,本方案主要由信息提取和设备认证组成,其中信息提取又分为特征提取与模糊提取,具体来说:
32.1)特征提取
33.一段时间内卫星的信号的波动具有随机性,并且在距离相近的情况下,两个接收器接收到的卫星信号的波动具有相似性,随着两台设备之间的距离增加,波动情况的相似性也随之减少。所以通过机群接收gps信号数据获取得到具有相似性的序列,并提取其中具有相似性的数据特征作为认证特征。具体步骤如下:
34.a、gps信号接收与解析:gps信号接收与解析:使用无人机天线与无人机上的gps接收器,将接收到的gps报文传回无人机中的控制器进行处理,无人机内部处理器将gps信号的报文进行解析。gps信号报文遵从nmea协议,报文中包含当前坐标,时间戳,卫星本身信息,通过无人机处理器解析出时间戳、卫星prn编号与该卫星的载噪比信号,存储到内部存储设备中;
35.b、gps数据处理:根据无人机群之间间隔的距离,在同一段时间内,不同无人机获取得到的同一个gps信号变化情况进行相似性的分析对比。并通过统计方法将直接接收到的一段时间内各个卫星的信号强度数据进行数据归一化,形成统一的数据序列。如图2和图3所示,为分别测量2米和70米时卫星信号的相似性结果,随着时间变化,不同设备上的同一颗卫星随着距离提高相似性降低,在10米以内,卫星信号存在更高的相似度,而当距离超过50米,相似性降低。
36.c、数据特征提取:根据多个无人机之间获取得到的对比数据,对数据进行特征提取,利用人工神经网络算法,神经网络层数3-4层,隐藏层节点采用100个。首先使用不同距离的数据作为训练集,距离作为标签进行训练,成功训练好神经网络后,卫星在同一个距离范围内能够成功匹配上相应距离的标签,从而分类出不同距离的数据,将神经网络全连接层最后一层去掉,获取得到前一层网络节点中的输出值,作为一定范围内数据的相似性特征,在距离相近时,多个设备之间收集到的数据的波动变化呈现相似性特征。在特征提取结束后,使用新的接收数据经过数据处理获取得到数据序列,根据其相似性特征进行验证。
37.2)模糊提取
38.由于机群内各个无人机根据gps信号提取出的特征,虽具有一定的相似性,但始终有所不同。因此需要采用模糊提取器(fuzzy extractor)进一步对第一步得到的特征数据进行处理,以使机群内所有的无人机得到完全相同的信息。模糊提取器用于从带有噪音的随机源中提取均匀分布且可精确再生的随机比特的密码学工具,其包含两个算法:
39.a、gen(w)
→
(p,r):生成算法gen输入字符串w(噪音随机源的一次采样),输出一个字符串r和一个公开的辅助串p;
40.b、rep(w',p)
→
r':再生算法输入w'(噪音随机源的另一次采样)和公开辅助串p,输出一个字符串r';模糊提取器要求在输入字符串w与再生算法输入w
‘
距离够近时,再生算法再生的字符串r'与生成的字符r完全相同。
41.在本实施例中,公开辅助串p由中心机产生,并广播给周围的无人机。周围无人机通过自身gps信号提取特征产生输入字符串w’,结合辅助串p,执行模糊提取得到字符串r。
42.3)设备认证
43.a、初始化阶段:在无人机起飞前,此时机群内所有无人机处于中心机一定范围内。所有无人机执行信息提取算法即通过gps信号解析、特征提取与模糊提取,得到初始信息r0(即字符串r),所有无人机将r0作为初始密钥k0。
44.b、飞行阶段:飞行过程中,机群以一定的时间间隔执行信息提取算法,并产生新的通信密钥。假设t时刻时,无人机提取出的信息为rt。则t 1时刻,机群使用的通信密钥为:kt 1=kt
⊕
rt=r0
⊕
r1
⊕…⊕
rt,
⊕
代表异或操作。
45.c、离群返航:假设飞行过程中,一无人机于n时刻离开机群执行任务,则返航时重新获取通信密钥的流程如下。返航时,离群机持有离群时通信密钥kn,离群机首先通过身份认证方案发送kn到中心机。中心机收到kn,并确认后。返回n时刻到t-1时刻的信息rn,(t-1)=rn 1
⊕
rn 2
⊕
...
⊕
rt-1到离群机。离群机接收到rn,(t-1)后,根据gps信号,计算得到rt。最后根据kn
⊕
rn,(t-1)
⊕
rt得到当前机群内通信密钥kt。
46.最后说明的是,以上实施例仅用以说明本发明的技术方案而非限制,尽管参照较佳实施例对本发明进行了详细说明,本领域的普通技术人员应当理解,可以对本发明的技术方案进行修改而不脱离本技术方案的宗旨和范围,其均应涵盖在本发明的权利要求范围当中。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。