1.本发明属于海洋勘探技术领域,尤其涉及一种二维海面鬼波水体成像测量装置、方法及应用。
背景技术:
2.目前,adcp是利用声学多普勒原理测验水流剖面速度的仪器,它一般配备有四个换能器,互相成一定的夹角。每个换能器既是发射器,也是接收器。adcp利用矢量合成原理,配合实时信号处理系统可以实现流速剖面测量;它可以在不干扰流场的情况下,通过数次实验,获得一个剖面内数十以至数百个层的流速,因而在大范围海洋剖面流速测量、河流的流速流量测量等领域得到广泛应用;它具有剖面分析能力,可以对水中悬浮污染物质的垂直分布及其随时间的变化过程进行高分辨率定量测量,也能够对水底泥沙运动和水泥交界层中沉积变迁的动态过程进行观测,还可以用来分析在海流作用下的大面积污染物的分布和运动规律;它具有三维速度测量能力,如果单纯考虑层流,那么它可以得到矢量流速。常规海洋地震资料处理中,往往将鬼波作为噪声进行消除,针对这一问题,近些年来发展了大批针对海洋地震采集资料的鬼波去除方法以提高一次波的成像解释精度。但鬼波也是地下地质体的反射,简单的抛弃这部分信息会降低勘探的精度。因此,有必要开展鬼波预测及成像方法研究以更好地恢复地下构造信息。
3.通过上述分析,现有技术存在的问题及缺陷为:现有技术中简单的抛弃地下地质体反射的鬼波,降低了勘探的精度。
4.解决以上问题及缺陷的难度为:在海上勘探施工中,通常是将震源和检波器布置在海平面之下,这样做既可增加激发能量、又可提高采集信号的质量。但空气与海水之间存在较大的波阻抗差异,由震源激发出的地震波不仅会向下传播反射回检波器,同时也会向上传播至海面再反射传播到地下反射界面形成鬼波。鬼波同一次波相比,其时间延迟较小且极性相反,很容易导致一次波损失部分有效的高、低频信息。因此,在常规的地震资料处理方法中一般将其作为干扰进行消除。
5.解决以上问题及缺陷的意义为:随着处理技术革新和认知提升,人们意识到地震处理中的“噪声”中包含丰富的地下介质信息,该发明使鬼波在资料处理中由“噪声”向“有效信息”转变,为海上地震勘探宽频处理方法提供新方向,提高勘探精度。
技术实现要素:
6.针对现有技术存在的问题,本发明提供了一种二维海面鬼波水体成像测量装置、方法及应用。在现有多普勒流速测量仪的基础上,对浅水条件下鬼波的测量装置的发明。与传统的测量装置相比,它是适用于浅水条件,能够吸收强反射能量,能够实现二维观测多次覆盖,显著提高测量精度。
7.本发明是这样实现的,一种,所述二维海面鬼波水体成像测量装置设置有垂直缆;
8.垂直缆布置在垂直方向上,垂直缆下端与数字包连接;垂直缆上端连接浮球,adcp
安置在浮球上方,强能量吸收板放置在adcp上方的海面上。
9.进一步,所述数字包上部设有姿态传感器和温度传感器、gps和压力传感器;数字包中间有地震采集记录器,内部设有六个多层数字板,通过位于顶部的数字包水密接头和垂直缆连接;
10.数字包下端设置有电池仓,整个数字包底部连接有金属基座;数字包外部设有一个十九针数字包水密接头,数字包水密接头连接一条垂直缆。
11.进一步,所述六个多层数字板分别为:总控制板、地震数据采集板a、地震数据采集板b、地震数据采集版c、温度压力采集板和gps与倾角数据采集板。
12.进一步,所述垂直缆上部设有姿态传感器,垂直缆内部设有十二道水听器组合;
13.垂直缆连接段上设有十九针电缆水密接头,电缆水密接头与数字包顶部的数字包水密接头连接,数字包水密接头外面也设有高强度钛合金金属保护套;垂直缆末端采用高强度钛合金金属保护套,保护套与电缆中间分开。
14.进一步,所述水听器组合道间距为1米,水听器组合采用两个海洋压电检波器前后组合,组内距为0.2米,水听器组合和电缆之间填充聚氨酯固体材料;
15.电缆为多组,电缆外部采用高强度聚酰胺材料包裹,聚酰胺材料中间混有凯夫拉纤维。
16.进一步,所述adcp包括电子舱、电子舱端盖、换能器底座、四个流速测量探头、温压传感器;
17.电子舱呈中空柱体,顶部法兰环及底部法兰环上均设有螺钉安装孔;电子舱端盖通过螺钉安装于电子舱顶部;
18.换能器底座通过螺钉安装于电子舱底部,电子舱端盖的顶部固定有水密接插件;水密接插件内部接线端连通电子舱内腔,外部接线端通过水密接插件堵头密封;换能器底座底部位于流速测量探头安装孔的间隙位置设有换能器底座安装平面。
19.进一步,所述换能器底座外底部开有四个周向均匀排布的流速测量探头安装孔,四个流速测量探头环向排布安装于换能器底座的流速测量探头安装孔内,测量波束的中轴线与adcp电子舱中空柱体的中轴线均呈相同的坡角,且坡面均以adcp电子舱的中轴线作为顶点,向侧边缘逐渐降低,流速测量探头的固定螺钉均从换能器底座的内壁向外安装固定。
20.进一步,所述换能器底座的内壁下凹球形面上开一个垂直内壁的温压传感器安装孔,温压传感器安装孔安装温压传感器;温压传感器为水密结构,自带防水密封件;
21.温压传感器安装孔的底部至少开设一个通气孔与换能器底座的外侧连通,通气孔垂直布置于换能器底座安装平面上,内部即连通至温压传感器安装孔;
22.温压传感器安装孔的周边设有一个温压传感器封盖安装平面并布置若干螺钉孔;
23.温压传感器封盖安装平面通过螺钉密封安装有温压传感器封盖,温压传感器封盖对温压传感器进行限位固定,中间开有圆形温压传感器出线孔,并通过螺钉安装至换能器底座的内壁。
24.进一步,所述强能量吸收板表面设有薄膜,薄膜表面中心固定一个圆环形质量片,附加了质量片的薄膜后方一定距离处设置一面刚性壁;薄膜后表面和刚性壁之间形成一段封闭的空气腔,刚性壁后面固定泡沫。
25.本发明另一目的在于提供一种所述二维海面鬼波水体成像测量装置的二维海面
鬼波水体成像测量方法,所述二维海面鬼波水体成像测量方法,包括:
26.施工前对垂直缆进行测试,将数字包和电缆的水密接头连接密封好,并仔细检查各部位接口,确保无松动现象,进行电池的电压和电量测试,将整套装置各个部件安装完毕后,在垂直缆上端系上浮球;
27.将连接好垂直缆的数字包放在小船上,船上用gps进行定位,将船开到观测系统中数字包的指定点位;首先将垂直缆和浮球放到水中,然后将数字包沉入海底;
28.在放缆过程中避免电缆和检波器与船体发生碰撞,放缆时确定工区内潮流方向和水深的变化,确定合理的偏移量;
29.当海面状况十分复杂的时候,施工时根据现场实验结果确定偏移量;放缆时按照设计的坐标并采用专用的导航软件进行放样;电缆放置完毕后进行气枪震源的激发,激发接收完毕后对电缆进行回收,对收起的电缆、数字包、检波器进行检查,当发现有问题时,应进行及时维修或更换。
30.本发明另一目的在于提供一种所述二维海面鬼波水体成像测量装置在测验水流剖面速度中的应用。
31.结合上述的所有技术方案,本发明所具备的优点及积极效果为:本发明对鬼波进行成像利用,加大了数据利用的广度;设有姿态传感器,能够校正缆的姿态对鬼波的影响,减小了测量误差;设有温度、压力传感器,能够获取温度压力信息,从而能够获得更准确的鬼波;同时本发明设有强能量板,吸收adcp中产生的强反射能量,提高鬼波水体成像的精度。
附图说明
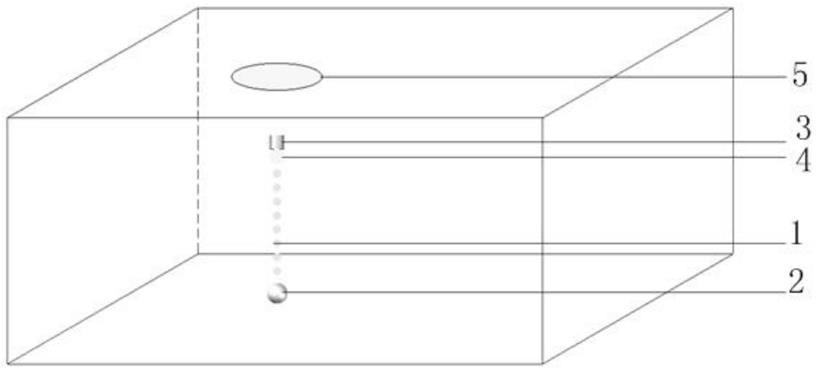
32.图1是本发明实施例提供的二维海面鬼波水体成像测量装置结构示意图。
33.图2是本发明实施例提供的数字包内部结构示意图。
34.图3是本发明实施例提供的数字包俯视图。
35.图4是本发明实施例提供的水听器示意图。
36.图5是本发明实施例提供的垂直缆电缆水密接头示意图。
37.图6是本发明实施例提供的adcp结构示意图。
38.图7是本发明实施例提供的adcp装置侧视图。
39.图8是本发明实施例提供的强能量吸收板结构示意图。
40.图中:1、垂直缆;2、数字包;3、adcp;4、浮球;5、强能量吸收板;6、姿态传感器;7、数字包水密接头;8、温度传感器;9、gps;10、压力传感器;11、温度压力采集板;12、倾角数据采集板;13、总控制板;14、地震数据采集板a;15、地震数据采集板b;16、地震数据采集版c;17、电池仓;18、金属基座;19、水听器组合;20、海洋压电检波器;21、电缆水密接头;22、电子舱;23、电子舱端盖;24、换能器底座;25、四个流速测量探头;26、温压传感器;27、薄膜;28、圆环形质量片;29、刚性壁;30、泡沫。
具体实施方式
41.为了使本发明的目的、技术方案及优点更加清楚明白,以下结合实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于
限定本发明。
42.针对现有技术存在的问题,本发明提供了一种二维海面鬼波水体成像测量装置、方法及应用,下面结合附图对本发明作详细的描述。
43.本发明提供的二维海面鬼波水体成像测量装置业内的普通技术人员还可以采用其他的步骤实施,图1的本发明提供的二维海面鬼波水体成像测量装置仅仅是一个具体实施例而已。
44.如图1所示,本发明实施例提供的二维海面鬼波水体成像测量装置包括:一条垂直缆1、数字包2、adcp3、浮球4和强能量吸收板5。其中,垂直缆1布置在垂直方向上,垂直缆1下端与数字包2连接,垂直缆1上端连接浮球4,adcp3安置在浮球4上方,强能量吸收板5放置在adcp上方的海面上。
45.如图2-图3所示,本发明实施例提供的数字包2外部设有一个19针数字包水密接头7,用于连接一条垂直缆1。数字包2上部设有姿态传感器6和温度传感器8、gps9和压力传感器10;数字包2中间有地震采集记录器,内部设有六个多层数字板,通过位于顶部的数字包水密接头7和垂直缆1连接,地震采集记录器内部包括总控制板13、地震数据采集板a14、地震数据采集板b15、地震数据采集版c 16、温度压力采集板11和gps9与倾角数据采集板12;数字包2下端设置有电池仓17,整个数字包底部连接有金属基座18,以保持数字包在海底保持平稳姿态。
46.数字包2采用连续采集方式,最大采样频率下采样可连续工作148小时,地震采集记录器的设计中采用了一系列高新技术:(1)采用嵌入式控制器——arm-at91rm9200,该机与常用的微计算机相比具有体积小、功耗低、工作可靠性高、功能强大等特点;(2)采用cs5372/5376组件组成24位模数转换器,动态范围大(最高可达120db),可选,且该组件检测能力强适合地震数据的采集。(3)采用actel、agl250v5、fpga,用于地址锁存、选通、数据串——并格式转换、计数、分频、逻辑控制等,从而使仪器小型化、轻便化,便于保存,便于升级;(4)采用fifo缓存器及闪存电子盘,存储容量为每道4g,保证了数据记录的准确性和真实性。
47.总控制板13内采用arm9做为主控制器,包含内存、网络、flash等功能,通过接口控制整个采集站,包括采集存储地震数据,监视外部排列状态和内部工作状态。逻辑电路为整机提供控制逻辑。电路设计采用大规模的可编程门阵列。该单元还包括为一个高精度的gps7授时时钟发生器,为整机控制和δ-σa/d转换器提供标准时钟。高精度内部信号源产生畸变指标达百万分之五级的、各种频率幅度的正弦波、方波。电源采用高效率lm1755芯片产生 3.3v和
±
2.5v模拟电源。从而将连续的模拟信号转化为离散的数字信号,实现了缆的数字化。采集板由外部输入4v直流电源供电。由于精密采样的需要,在采集板上还要对电源作二次处理,由外部输入的4v直流电源变换出模拟电源八种( 2.5av,-2.5av, 3.3av, vrefa,-vrefa, vrefb,-vrefb和 tsgv)和数字电源两种( 3.3dv, 3.3dv2)。采集板对电源电压的纹波系数要求很高,入口电压4v的纹波电压控制在10-15mv,转换后模拟电源的纹波控制在0.05mv左右。gps与倾角数据采集板12和垂直缆1工作段内的姿态传感器6及gps9连接,用于采集姿态传感器6内传输的数据和gps 9内的数据并将采集到的数据传输到总控制板13上的存储器内进行存储。温度和压力数据采集板11分别用于采集温度传感器7和压力传感器9内的数据,并将数据输出到总控制板13下的存储器内进行存储。位于底部的电池仓
17用于给整个装置的各个零部件供电,包含电源变换电路单元,该电路将电池电压转换成采集系统需要的各种电源,包括数字系统电源、模拟系统电源、a/d转换器高精度参考电压等。电池仓17通过位于顶部的数字包水密接头7进行充电,整个球体内部采用聚氯乙烯浇铸密封。
48.如图4-图5所示,垂直缆1上部设有姿态传感器6,用于记录垂直缆的姿态,垂直缆1内部设有12道水听器组合19,道间距为1米,水听器组合19采用两个海洋压电检波器20前后组合,组内距为0.2米,电缆和水听器组合19之间填充聚氨酯固体材料。水听器组合19间设有多组电缆,外部采用高强度聚酰胺材料包裹,聚酰胺材料中间混有凯夫拉纤维。垂直缆1连接段上设有19针电缆水密接头21,可和数字包2顶部的数字包水密接头7连接。垂直缆1末端采用高强度钛合金金属保护套,保护套与电缆中间分开,垂直缆1末端通过19针电缆水密接头21与数字包2顶部的数字包水密接头7连接,数字包水密接头7外面也设有高强度钛合金金属保护套。连接时高强度钛合金金属保护套和凯夫拉纤维连接受力,而内部电缆接口处不受力。
49.如图6-图7所示,adcp 3包括电子舱22、电子舱端盖23、换能器底座24、四个流速测量探头25、温压传感器26。电子舱22呈中空柱体,顶部法兰环及底部法兰环上均设有螺钉安装孔;电子舱端盖23通过螺钉安装于电子舱22顶部,换能器底座24通过螺钉安装于电子舱22底部,电子舱端盖23的顶部固定有水密接插件。水密接插件内部接线端连通电子舱22内腔,外部接线端通过水密接插件堵头密封。换能器底座24外底部开有4个周向均匀排布的流速测量探头安装孔,四个流速测量探头25环向排布安装于换能器底座24的流速测量探头安装孔内,其测量波束的中轴线与adcp电子舱22中空柱体的中轴线均呈相同的坡角,且其坡面均以adcp电子舱22的中轴线作为顶点,向侧边缘逐渐降低。流速测量探头25的固定螺钉均从换能器底座3的内壁向外安装固定。由于adcp还需要测量当前的水温和水压,因此需要在换能器底座24的内壁下凹球形面上开一个垂直内壁的温压传感器安装孔用于安装温压传感器26。在温压传感器安装孔的底部至少开设一个通气孔与换能器底座24的外侧连通,使温压传感器26的感应能接触外部流体。温压传感器安装孔的周边设有1个温压传感器封盖安装平面并布置若干螺钉孔,用于温压传感器封盖的密封安装。温压传感器封盖用于对温压传感器26进行限位固定,中间开有圆形温压传感器26出线孔,并通过螺钉安装至换能器底座24的内壁。其中温压传感器26为水密结构,自带防水密封件。在换能器底座24底部位于流速测量探头安装孔的间隙位置设有换能器底座安装平面。温压传感器26的通气孔垂直布置于换能器底座安装平面上,内部即连通至温压传感器安装孔。
50.如图8所示,强能量吸收板5放置在adcp3正上方的海面上,用于吸收激发adcp3产生的10khz以上的强能量来压制强能量产生的干扰,提高水体成像精度。强能量吸收板5表面设有薄膜27,薄膜27表面中心固定一个圆环形质量片28;附加了质量片的薄膜后方一定距离处设置一面刚性壁29;薄膜后表面和刚性壁之间将形成一段封闭的空气腔,刚性壁后面固定泡沫30。
51.本发明的工作原理为:施工前对垂直缆进行测试,将数字包和电缆的水密接头连接密封好,并仔细检查各部位接口,确保无松动现象,进行电池的电压和电量测试,将整套装置各个部件安装完毕后,在垂直缆上端系上浮球。
52.将连接好垂直缆的数字包放在小船上,船上用gps进行定位,将船开到观测系统中
数字包的指定点位,首先将垂直缆和浮球放到水中,然后将数字包沉入海底。在放缆过程中避免电缆和检波器与船体发生碰撞,放缆时应考虑工区内潮流方向和水深的变化,确定合理的偏移量。当海面状况十分复杂的时候,施工时应根据现场实验结果确定偏移量。放缆时应按照设计的坐标并采用专用的导航软件进行放样。电缆放置完毕后进行气枪震源的激发,激发接收完毕后对电缆进行回收,对收起的电缆、数字包、检波器进行检查,当发现有问题时,应进行及时维修或更换。
53.证明部分(具体实施例/实验/仿真/能够证明本发明创造性的正面实验数据等)
54.实施例
55.步骤一、施工前对垂直缆进行测试,将数字包和电缆的水密接头连接密封好,并仔细检查各部位接口,确保无松动现象;
56.步骤二、进行电池的电压和电量测试,将整套装置各个部件安装完毕后,在垂直缆上端系上浮球;
57.步骤三、将连接好垂直缆的数字包放在小船上,船上用gps进行定位,将船开到观测系统中数字包的指定点位;
58.步骤四、将垂直缆和浮球放到水中,然后将数字包沉入海底。在放缆过程中避免电缆和检波器与船体发生碰撞,放缆时应考虑工区内潮流方向和水深的变化,确定合理的偏移量。当海面状况十分复杂的时候,施工时应根据现场实验结果确定偏移量。放缆时应按照设计的坐标并采用专用的导航软件进行放样。
59.步骤五、电缆放置完毕后进行气枪震源的激发,激发接收完毕后对电缆进行回收,对收起的电缆、数字包、检波器进行检查,当发现有问题时,应进行及时维修或更换。
60.以上所述,仅为本发明的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,都应涵盖在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。