1.本发明属于车辆搬运机器人技术领域,涉及一种基于雷达调整位置的四爪式车辆搬运机器人叉车方法。
背景技术:
2.随着社会的发展,经济的提高,汽车数量急剧增加,家用汽车已是各户必备交通工具,各城市停车难的问题也随之而来,停车排队、找车位时间长,传统车主自主找车位停车的方法已经不能满足现在各城市停车需求,因此有了车辆搬运机器人。
3.目前,停车场的单层航运机器人基本上都采用四爪结构,四个叉臂两两配合将轮胎夹抱住,将车辆轮胎夹起来通过行走臂的移动实现车辆的搬运。但是,在叉臂叉起车辆的过程中,如果对车辆搬运机器人与车辆的位置关系定位失误,就会造成叉臂撞到轮胎的问题。
技术实现要素:
4.鉴于现有技术中存在上述技术问题,本发明的目的是针对现有的可伸缩四爪式车辆搬运机器人叉车时容易撞到轮胎的问题,设计一种基于雷达调整位置的四爪式车辆搬运机器人叉车方法。
5.本发明的技术方案如下所述:
6.本发明提供一种基于雷达调整位置的四爪式车辆搬运机器人叉车方法,所述方法包括:
7.车辆搬运机器人驶到车辆的一侧;
8.激光雷达扫描器扫描车辆的轮廓,获取车辆的轴距和轴距的中心垂线;
9.控制舵轮和万向轮启动,使得激光雷达扫描器与轴距中心垂线的所在的平面同时垂直于车辆侧面和车辆搬运机器人的横梁,同时将车辆搬运机器人的横梁长度调到最短;
10.控制距离激光雷达扫描器较远的舵轮和万向轮启动,调整横梁的长度,直到横梁的长度大于车辆的轴距,且其差值大于等于第一预定差值;
11.控制舵轮和万向轮同时启动,沿着横梁方向上向横梁上安装了激光雷达扫描器的一侧同步移动距离l,直到横梁的中心与车辆轴距的中心点相对应;
12.调整四个叉臂的位置,使得两个中间叉臂之间的距离小于轴距,且其差值大于或等于第二预定差值,使得两个边叉臂之间的距离大于轴距,且其差值大于或等于第二预定差值,同时,控制叉臂下降至距离地面1cm的高度;
13.控制车辆搬运机器人驶向车辆,至车辆搬运机器人的横梁与车辆之间的距离处于10-15cm范围内;
14.控制四个叉臂相对应的车轮方向移动,同时检测叉臂移动电机的电流,当电流增大超过预定的阈值时,停止移动对应的叉臂;
15.控制叉臂升高至最高位。
16.其中,所述舵轮和万向轮同步移动的距离l为横梁的中心点与激光雷达扫描器之间的距离,其计算公式为:
17.l=(l0 l’)/2-a
18.其中,l0为车辆搬运机器人的横梁最短的长度,l’为车辆搬运机器人的横梁伸长的长度,a为激光雷达扫描器与距离最近的横梁的一端之间的距离。
19.所述第一预定差值和第二预定差值为保证叉臂插入车底时不会撞到车轮时横梁的长度和叉臂与轮胎间的距离。
20.所述车辆搬运机器人包括:
21.一个横梁100,该横梁100呈一字形结构,在其中部设有长度调节结构120,在横梁上方安装有激光雷达扫描器140;
22.两个纵梁200,每个纵梁200的一端安装有舵轮210,另一端安装有万向轮220,且其安装有舵轮210的一端与横梁100的一端通过升降结构110连接在一起;
23.四个叉臂300,包括两对结构对称相同的叉臂300,两对叉臂300分别可移动的安装在横梁100的与纵梁200同一侧的左右两侧;
24.所述长度调节结构120的两端分别可滑动的插入横梁100的左右两部分的一端;
25.所述升降结构110包括电机111、安装板112、丝杠113、螺母114、导轨115和滑块116。所述安装板112安装在纵梁200上,所述电机111安装在安装板112上,并与丝杠113固定连接;所述螺母114安装在横梁100上,且与丝杠113相互配合;所述导轨垂直安装在安装板上,所述滑块安装在横梁上,所述导轨和滑块相互配合。
26.对于上述车辆搬运机器人来说,如果激光雷达扫描器与轴距中心垂线的所在的平面同时垂直于车辆侧面和车辆搬运机器人的横梁,那么车辆搬运机器人的横梁将于车辆的侧面相互平行,且激光雷达扫描器与车辆轴距的中心点相对应。此时,如果控制距离激光雷达扫描器的舵轮和万向轮启动,调整横梁的长度,那么,由于距离激光雷达扫描器较远的舵轮和万向轮与激光雷达扫描器之间有长度调节结构,因此,在距离激光雷达扫描器较远的舵轮和万向轮移动的过程中,长度调节结构伸长,但激光雷达扫描器的位置不变,即在该过程中激光雷达扫描器始终与车辆轴距的中心点相对应。然后,控制舵轮和万向轮同时启动,沿着横梁方向上向横梁上安装了激光雷达扫描器的一侧同步移动距离l,所述距离l为横梁的中心点与激光雷达扫描器之间的距离,就能保证横梁的中心与车辆轴距的中心点向对应。在此之后,调整叉臂的位置等操作才不会因为车辆横梁中心没有与车辆轴距的中心点相对应,而造成叉臂撞到轮胎等问题。
27.本发明具有如下有益效果:通过调整激光雷达扫描器与轴距中心垂线的所在的平面同时垂直于车辆侧面和车辆搬运机器人的横梁,确保车辆搬运机器人在纵梁方向上的位置关系;通过在激光雷达扫描器与车辆轴距的中心点相对应后,移动激光雷达扫描器与横梁中心点之间的距离,保证横梁的中心点与车辆轴距的中心点相对应,来定位车辆搬运机器人与车辆在横梁方向上的位置关系;最终确保车辆搬运机器人叉车是不会撞到车轮。
附图说明
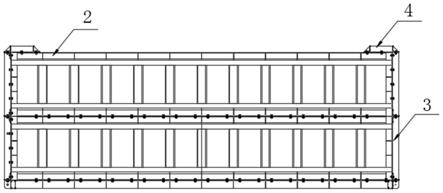
28.图1为本发明实施例的车辆搬运机器人的立体结构图;
29.图2为本发明实施例的升降结构的立体结构图;
30.其中,100为横梁,110为升降结构,120为长度调节结构,140为激光雷达扫描器,111为电机,112为安装板,113为丝杠,114为螺母,200为纵梁,210为舵轮,220为万向轮,300为叉臂。
具体实施方式
31.为了更清楚地说明本发明的技术方案,下面将结合具体实施例和附图进行说明,显而易见地,下面描述中的实施例仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些实施例获得其他的实例。
32.实施例1
33.如图1和2所示,本实施例涉及一种可伸缩四爪式车辆搬运机器人,所述机器人包括:
34.一个横梁100,该横梁100呈一字形结构,在其中部设有长度调节结构120,在横梁上方安装有激光雷达扫描器140;
35.两个纵梁200,每个纵梁200的一端安装有舵轮210,另一端安装有万向轮220,且其安装有舵轮210的一端与横梁100的一端通过升降结构110连接在一起;
36.四个叉臂300,包括两对结构对称相同的叉臂300,两对叉臂300分别可移动的安装在横梁100的与纵梁200同一侧的左右两侧;
37.所述长度调节结构120的两端分别可滑动的插入横梁100的左右两部分的一端;
38.所述升降结构110包括电机111、安装板112、丝杠113、螺母114、导轨115和滑块116。所述安装板112安装在纵梁200上,所述电机111安装在安装板112上,并与丝杠113固定连接;所述螺母114安装在横梁100上,且与丝杠113相互配合;所述导轨垂直安装在安装板上,所述滑块安装在横梁上,所述导轨和滑块相互配合。
39.上述车辆搬运机器人的工作过程为:上述车辆搬运机器人在接收到搬运汽车指令以及汽车轴距等信息后,舵轮和万向轮处电机启动控制车辆搬运机器人驶向汽车旁边的搬运位;车辆搬运机器人到达指定位置后升降结构处电机带动横梁和叉臂整体降低至离地一公分,同时叉臂移动至可插入车轮前方和后方的位置;舵轮和万向轮处电机启动控制车辆搬运机器人驶向车辆,使其与车辆之间存在10-15cm的空隙;升降结构的电器启动,控制横梁和叉臂整体升高,从而将车辆抬离地面。
40.实施例2
41.本实施例涉及一种实施例1中的基于雷达调整位置的四爪式基于雷达调整位置的四爪式车辆搬运机器人叉车方法,所述方法包括:
42.s1:车辆搬运机器人驶向车辆的一侧,并使其横梁与车辆向平行;
43.s2:激光雷达扫描器扫描车辆的轮廓,获取车辆的轴距和轴距的中心垂线;
44.s3:控制距离激光雷达扫描器较远的舵轮和万向轮启动,调整横梁的长度,直到横梁的长度大于车辆的轴距,且其差值大于等于第一预定差值;
45.由于距离激光雷达扫描器较远的舵轮和万向轮与激光雷达扫描器之间有长度调节结构,因此,在距离激光雷达扫描器较远的舵轮和万向轮移动的过程中,长度调节结构伸长,但激光雷达扫描器的位置不变。
46.s4:控制舵轮和万向轮同时启动,沿着横梁方向上向横梁上安装了激光雷达扫描
器的一侧同步移动距离l,直到横梁的中心与车辆轴距的中心点相对应;
47.所述舵轮和万向轮同步移动的距离l为横梁的中心点与激光雷达扫描器之间的距离,其计算公式为:
48.l=(l0 l’)/2-a
49.其中,l0为车辆搬运机器人的横梁最短的长度,l’为车辆搬运机器人的横梁伸长的长度,a为激光雷达扫描器与距离最近的横梁的一端之间的距离。
50.s5:调整四个叉臂的位置,使得两个中间叉臂之间的距离小于轴距,且其差值大于或等于第二预定差值,使得两个边叉臂之间的距离大于轴距,且其差值大于或等于第二预定差值,同时,控制叉臂下降至距离地面1cm的高度;
51.所述第一预定差值和第二预定差值为保证叉臂插入车底时不会撞到车轮时横梁的长度和叉臂与轮胎间的距离。
52.s6:控制车辆搬运机器人驶向车辆,至车辆搬运机器人的横梁与车辆之间的距离处于10-15cm范围内;
53.10-15cm是一个既能使车辆搬运机器人叉起车辆,有不会撞到车辆的安全距离。
54.s7:控制四个叉臂相对应的车轮方向移动,同时检测叉臂移动电机的电流,当电流增大超过预定的阈值时,停止移动对应的叉臂;
55.当电机的电流增大超过预定的阈值,说明叉臂的移动收到了较大的阻力,判定此时叉臂已经接触到车轮。
56.s8:控制叉臂升高至最高位。
57.当车轮被两个叉臂夹住,两叉臂之间的孔隙不足以使车轮掉落,因此,当叉臂升高,车轮带着车身就或离开地面,最终完成叉车动作。
58.本发明未涉及部分均与现有技术相同或可采用现有技术加以实现。
59.对所公开的实施例的上述说明,使本领域专业技术人员能够实现或使用本发明。对这些实施例的多种修改对本领域的专业技术人员来说将是显而易见的,本文中所定义的一般原理可以在不脱离本发明的精神或范围的情况下,在其它实施例中实现。因此,本发明将不会被限制于本文所示的这些实施例,而是要符合与本文所公开的原理和新颖特点相一致的最宽的范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。