1.本实用新型涉及航空无人机技术领域,尤其涉及一种无人机抗风力干扰装置。
背景技术:
2.无人驾驶飞机简称“无人机”,是利用无线电遥控设备和自备的程序控制装置操纵的不载人飞机,或者由车载计算机完全地或间歇地自主地操作。与有人驾驶飞机相比,无人机往往更适合那些太“愚钝,肮脏或危险”的任务。无人机按应用领域,可分为军用与民用。军用方面,无人机分为侦察机和靶机。民用方面,无人机加行业应用,是无人机真正的刚需;目前在航拍、农业、植保、微型自拍、快递运输、灾难救援、观察野生动物、监控传染病、测绘、新闻报道、电力巡检、救灾、影视拍摄、制造浪漫等等领域的应用,大大的拓展了无人机本身的用途,发达国家也在积极扩展行业应用与发展无人机技术。是利用无线电遥控设备和自备的程序控制装置操纵的不载人飞行器。无人机实际上是无人驾驶飞行器的统称,从技术角度定义可以分为:无人固定翼飞机、无人垂直起降飞机、无人飞艇、无人直升机、无人多旋翼飞行器、无人伞翼机等。与载人飞机相比,它具有体积小、造价低、使用方便、对作战环境要求低、战场生存能力较强等优点。由于无人驾驶飞机对未来空战有着重要的意义,世界各主要军事国家都在加紧进行无人驾驶飞机的研制工作。
3.在现有的无人机使用中,当无人机受到外部气流的影响时,气流对无人机造成的抖动会传输至摄像头的位置,导致摄像头拍摄的画面模糊,拍摄的照片无法使用。
技术实现要素:
4.本实用新型提供一种无人机抗风力干扰装置,解决了在现有的无人机使用中,当无人机受到外部气流的影响时,气流对无人机造成的抖动会传输至摄像头的位置,导致摄像头拍摄的画面模糊,拍摄的照片无法使用的技术问题。
5.为解决上述技术问题,本实用新型提供的一种无人机抗风力干扰装置,包括机壳,所述机壳的内部固定连接有固定杆,四个所述固定杆的一端内侧上下均设有固定板,若干所述固定板的中心固定连接有活动柱,四个所述活动柱上均套设有弹簧一,四个所述固定杆的内侧中心设有活动板,所述活动板的四角均开设有滑槽,四个所述固定杆均贯穿滑槽,若干所述弹簧一分别设置在活动板的顶部与底部,所述活动板顶部固定板的中心一端均设有滑块,四个所述滑槽的内部一端均设有滑杆,四个所述滑杆的外侧均套设有弹簧二,四个所述滑杆的一端均与滑块的一侧中心滑动连接。
6.优选的,所述机壳的顶部设有上盖,所述上盖的内部设有无人机控制系统与蓄电盒,所述机壳的底部两侧固定连接有支撑腿,所述支撑腿的长度与机壳的长度一致,所述机壳的两侧两端均固定连接有支架。
7.优选的,所述支架的一端顶部均固定连接有电机,四个所述电机的端口均固定连接有连接杆,四个所述连接杆的顶部均固定连接有转动翼,四个所述电机均与无人机控制系统电连接。
8.优选的,所述活动板的顶部中心贯穿有固定柱,所述固定柱的上方固定连接有限位珠,所述限位珠且位于活动板的上方,所述固定柱的底部一端固定连接有摄像盒,所述摄像盒的一侧中心设有摄像头。
9.优选的,所述摄像头与无人机控制系统电连接。
10.优选的,四个所述固定杆的顶端与机壳内部的横板固定连接,且横板位于机壳的内部一端中心的位置。
11.与相关技术相比较,本实用新型提供的一种无人机抗风力干扰装置具有如下有益效果:摄像头的顶部设有活动板,当无人机受到气流影响时,活动板会在气流吹动的惯性下移动,且在活动板移动时,会在弹簧一与弹簧二受力下复位,从而无人机本身在气流的影响下晃动时,将摄像头的影响降到最低,有效的保证了无人机拍摄的清晰度。
附图说明
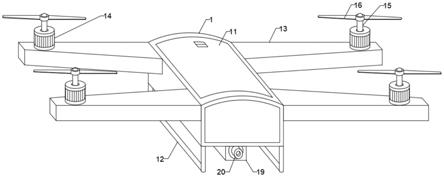
12.图1为本实用新型一种无人机抗风力干扰装置的立体结构示意图;
13.图2为本实用新型一种无人机抗风力干扰装置中摄像盒的立体结构示意图;
14.图3为本实用新型一种无人机抗风力干扰装置图2中a处的放大结构示意图。
15.图中标号:1、机壳;2、固定杆;3、固定板;4、活动柱;5、弹簧一;6、活动板;7、滑槽;8、滑块;9、滑杆;10、弹簧二;11、上盖;12、支撑腿;13、支架;14、电机;15、连接杆;16、转动翼;17、固定柱;18、限位珠;19、摄像盒;20、摄像头。
具体实施方式
16.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例;基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
17.实施例,由图1-3给出,本实用新型一种无人机抗风力干扰装置,包括机壳1,机壳1的内部固定连接有固定杆2,四个固定杆2的一端内侧上下均设有固定板3,若干固定板3的中心固定连接有活动柱4,四个活动柱4上均套设有弹簧一5,四个固定杆2的内侧中心设有活动板6,活动板6的四角均开设有滑槽7,四个固定杆2均贯穿滑槽7,若干弹簧一5分别设置在活动板6的顶部与底部,活动板6顶部固定板3的中心一端均设有滑块8,四个滑槽7的内部一端均设有滑杆9,四个滑杆9的外侧均套设有弹簧二10,四个滑杆9的一端均与滑块8的一侧中心滑动连接。
18.其中,机壳1的顶部设有上盖11,上盖11的内部设有无人机控制系统与蓄电盒,机壳1的底部两侧固定连接有支撑腿12,支撑腿12的长度与机壳1的长度一致,机壳1的两侧两端均固定连接有支架13,可将上盖11掀起更换蓄电盒内部的电池,使得无人机续航更持久,且底部的支撑腿12高于摄像盒19,防止在降落时触碰到摄像盒19。
19.其中,支架13的一端顶部均固定连接有电机14,四个电机14的端口均固定连接有连接杆15,四个连接杆15的顶部均固定连接有转动翼16,四个电机14均与无人机控制系统电连接,可通过远程遥控无人机控制系统,操控电机14带动转动翼16转动的目的。
20.其中,活动板6的顶部中心贯穿有固定柱17,固定柱17的上方固定连接有限位珠
18,限位珠18且位于活动板6的上方,固定柱17的底部一端固定连接有摄像盒19,摄像盒19的一侧中心设有摄像头20,使得摄像头20与摄像盒19的位置在机壳1的内部不变,防止在天空拍摄时发生抖动,造成拍摄的画面不清晰。
21.其中,摄像头20与无人机控制系统电连接,可远程操控摄像头20的拍摄角度,且可远程观看。
22.其中,四个固定杆2的顶端与机壳1内部的横板固定连接,且横板位于机壳1的内部一端中心的位置,不会与上盖11发生冲突,打开上盖11时,不会触碰到固定杆2。
23.工作原理:当使用时,将无人机放置地面,通过远程遥控无人机,使得电机14带动转动翼16转动,从而达到无人机升空的目的,当无人机飞起后遇到大风时,风的力度吹在机壳1的外部,通过活动板6带动滑杆9沿着滑槽7在滑块8上滑动,且在弹簧二10的受力下活动板6复位,从而达到活动板6带动摄像头20减轻左右风力的目的,当风从上往下对无人机吹时,通过活动板6沿着活动柱4上下滑动,使得活动板6在弹簧一5的受力下复位,从而达到减轻活动板6受到风力影响产生的震动的目的。
24.需要说明的是,在本文中,诸如第一和第二等之类的关系术语仅仅用来将一个实体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些实体或操作之间存在任何这种实际的关系或者顺序。而且,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。
25.尽管已经示出和描述了本实用新型的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本实用新型的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本实用新型的范围由所附权利要求及其等同物限定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。